一种提高PMSM无差拍直接转速控制鲁棒性的方法
本发明涉及一种提高pmsm无差拍直接转速控制鲁棒性的方法,具体涉及一种基于双环路扰动观测器的鲁棒性提升方法。
背景技术:
1、永磁同步电机无差拍直接转速控制对于系统的参数误差以及未建模扰动极其敏感,如果不加以补偿,上述扰动会使得系统的转速响应变慢,并带来稳态误差甚至造成转速控制失稳。因此,提高pmsm无差拍直接转速控制的鲁棒性至关重要。
2、现有的无差拍直接转速控制通常采用单观测器结构进行扰动观测和补偿,以提高鲁棒性。此类方法将系统的速度环路扰动和电流环路扰动当成一个集总扰动量。然而,内环电流扰动和外环转速扰动在幅值和变化率上具有较大差异。假设只使用单个滑模观测器进行总体集中扰动估计,在这种情况下,观测器增益需要调整至足够大以确保收敛,这反过来又会在响应中引入严重的抖振,并恶化控制性能。因此,传统的单观测器结构不能保证最优的扰动观测和速度控制性能。另一方面,现有的滑模观测器大多采用一阶滑模原理进行设计,在这个过程中符号函数带来的抖振现象难以避免,损害观测器的性能,造成转速响应纹波增大,并不能直接应用于要求高性能速度控制的场合。
技术实现思路
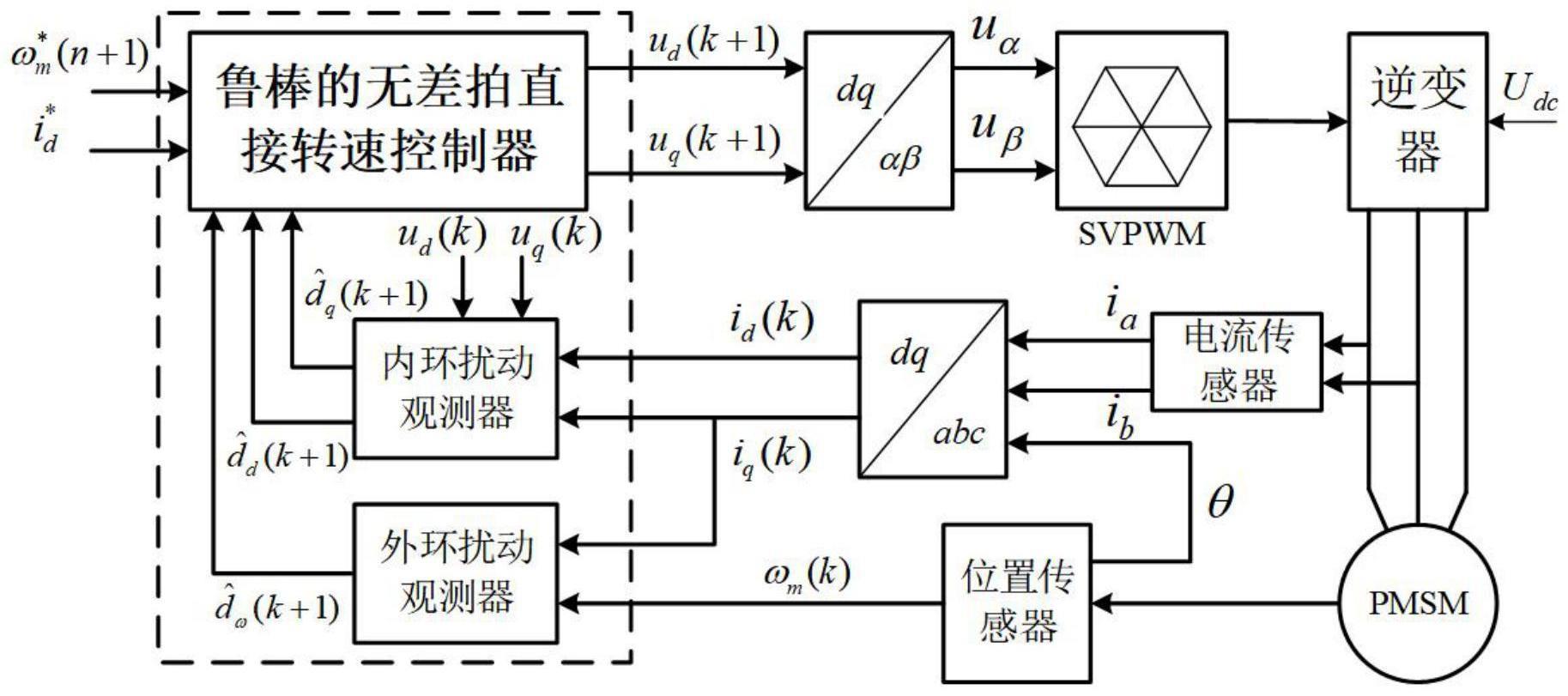
1、为了提升表贴式三相永磁同步电机无差拍直接转速控制针对参数误差以及外部扰动的鲁棒性,本发明提供了一种提高pmsm无差拍直接转速控制鲁棒性的方法。该方法利用电机在不同运行状态下的电流、电压和转速信息设计双环路观测器,对电机转速控制过程中由于外部扰动、参数误差以及死区等非理想因素造成的影响进行观测和抑制。本发明所提出的观测器具有双环结构,即内环扰动观测器和外环扰动观测器,该拓扑可以分别对电流方程的扰动和机械方程的扰动分别观测,实现最优观测效果。
2、本发明的目的是通过以下技术方案实现的:
3、一种提高pmsm无差拍直接转速控制鲁棒性的方法,包括如下步骤:
4、步骤1、通过离线测试获得永磁同步电机的电气参数和机械参数,其中:电气参数包含永磁体磁链ψf0、相电阻r0和表贴式永磁同步电机的相电感l0;机械参数包含电机的转动惯量j0、极对数p;
5、步骤2、根据电机的电流电压方程设计电流内环扰动观测器,其表达式如下所示:
6、
7、其中,为电流环扰动观测值;λdq和αdq为需要调整的观测器增益,代表电流观测误差,其中带有‘^’的物理量表示观测值;t代表电流内环离散化周期;‘sign’代表符号函数;k代表采样时刻;idq(k)代表k时刻采样得到的dq轴电流值;代表k时刻dq轴电流值在观测器中的状态变量;
8、步骤3、根据电机的运动学方程设计转速外环扰动观测器,其表达式如下所示:
9、
10、其中,代表外环扰动观测值;λω和αω为外环扰动观测器增益,tp为外环扰动观测器的离散化周期;代表k时刻观测得到的电机机械角速度;ωm(k)代表k时刻采样得到的电机机械角速度;此外,代表转速观测误差,eω(k)代表观测误差在k时刻的值;
11、步骤4、在k时刻计算出k+1时刻的dq轴电流预测值用于控制信号的生成,k+1时刻的dq轴电流预测值由下式计算:
12、
13、其中,iq(k)和id(k)分别代表k时刻q轴和d轴电流的采样值;uq0(k)和ud0(k)分别代表k时刻输入给svpwm的参考电压;ωe(k)代表k时刻电机的电角速度;
14、步骤5、计算鲁棒无差拍直接转速控制器的输出电压ud(k+1)和uq(k+1),计算表达式如下所示:
15、
16、其中,‘sat’代表饱和函数,用于限制q轴电流的幅值,避免超过驱动器最大承受能力;为d轴电流参考值,在表贴式pmsm中恒为0;n代表速度控制周期;为转速在n+1时刻的参考值;ωm(n)代表n时刻的转速采样值;ξ代表调整因子,用于调节响应速度并减小响应中的超调;和分别代表k时刻q轴扰动、d轴扰动以及速度环扰动的观测值;和代表k+1时刻电机dq轴电流的观测值;
17、步骤6、根据下述表达式对步骤5中计算所得的电压进行限制,从而得到最终的输出电压u′d(k+1)和u′q(k+1):
18、
19、其中,udc代表直流母线电压;ud(k+1)和uq(k+1)代表电压限制前的控制器的输出电压。
20、相比于现有技术,本发明具有如下优点:
21、1、本发明提出的新型鲁棒的无差拍直接转速控制算法与传统技术相比,提出了双扰动观测器的拓扑结构,使用内外环观测器进行扰动观测与补偿,从而可以对内外环扰动进行解耦,并实现分别估计。这意味着每个观测器增益都可以根据内外环扰动的不同幅度和变化率进行特殊设计,从而实现最优的观测和补偿效果,大大优化了扰动补偿性能,并减小了抖振。
22、2、本发明所述的观测器根据二阶滑模原理进行设计,将符号函数隐藏到积分项中,从本质上消除了抖振现象,大大提高了速度控制性能和鲁棒性。
23、3、本发明应用于表贴式永磁同步电机转速控制中,无需增加任何硬件设备就能够提高无差拍直接转速控制的鲁棒性,降低了硬件成本。
24、4、本发明要求驱动器有两个电流传感器、一个位置传感器,无需额外的硬件设计。算法可以在数字控制芯片(dsp)中编程实现,能够应用于通用的永磁同步电机驱动器,具有极高的应用价值和经济价值。
技术特征:
1.一种提高pmsm无差拍直接转速控制鲁棒性的方法,其特征在于所述方法包括如下步骤:
2.根据权利要求1所述的提高pmsm无差拍直接转速控制鲁棒性的方法,其特征在于所述k+1时刻的dq轴电流预测值由下式计算:
3.根据权利要求1所述的提高pmsm无差拍直接转速控制鲁棒性的方法,其特征在于所述ud(k+1)和uq(k+1)的计算表达式如下所示:
4.根据权利要求1所述的提高pmsm无差拍直接转速控制鲁棒性的方法,其特征在于所述u′d(k+1)和u′q(k+1)的计算表达式如下所示:
技术总结
本发明公开了一种提高PMSM无差拍直接转速控制鲁棒性的方法,所述方法包括如下步骤:步骤1、通过离线测试获得永磁同步电机的电气参数和机械参数;步骤2、根据电机的电流电压方程设计电流内环扰动观测器;步骤3、根据电机的运动学方程设计转速外环扰动观测器;步骤4、在k时刻计算出k+1时刻的dq轴电流预测值,用于控制信号的生成;步骤5、计算鲁棒无差拍直接转速控制器的输出电压;步骤6、对步骤5中计算所得的电压进行限制,从而得到最终的输出电压。本发明所提出的观测器具有双环结构,即内环扰动观测器和外环扰动观测器,该拓扑可以分别对电流方程的扰动和机械方程的扰动分别观测,实现最优观测效果。
技术研发人员:李绍斌,徐永向,邹继斌,张文韬,禹国栋,肖利军
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!