一种规避障碍的管道内电缆巡检机器人
本发明涉及管道巡检设备,尤其涉及一种规避障碍的管道内电缆巡检机器人。
背景技术:
1、地下电缆作为电力系统中的重要部分,它的运行安全保障成为关键环节,其运行状况的安全与否将直接关系到整个城市电力系统的安全运行,在长期使用过程中,电缆会受到来自自身和外力的各种影响,发生各类故障,所以必须对电缆进行定期检查与维护。传统的人工检测方法是人工下到管井安放设备对故障电缆进行检测(低压脉冲法、经典电桥法、高压脉冲法等手段方法进行检测),从而判断出两个人工作业区之间的电缆运行状况,如此段线路无故障则换点位重复上述方法直至找出故障点。
2、人工检测存在耗时耗力、效率低等问题,公开号为cn114709747b的专利公开了一种自适应异形空间电缆管道巡检机器人,以替代人工进行巡检,在排管内有障碍物或电缆排布复杂的情况,通过轴向旋转运动,使机器人通过在不接触电缆的情况下顺利继续前进,完成测温任务。但遇到管道因外力发生变形的情况下,管道内空间变小,机器人无法通过障碍继续作业。
技术实现思路
1、针对现有技术方案中管道内空间变小导致机器人无法通过的问题,本发明提供了一种规避障碍的管道内电缆巡检机器人。
2、本发明提供如下的技术方案:一种规避障碍的管道内电缆巡检机器人,包括:
3、移动装置,包括左支架和右支架,所述左支架和右支架均包括倾斜支板、转动连接在所述倾斜支板上的滚轮以及与所述滚轮传动连接的驱动电机,两所述倾斜支板排列成八字形;
4、避障装置,包括设置在所述左支架和右支架之间的伸缩装置、分别朝向左前方和右前方的两个测距传感器以及与所述伸缩装置、测距传感器信号连接的控制器。
5、优选地,所述驱动电机及滚轮设置在两所述倾斜支板朝向彼此的一侧,所述驱动电机通过同步带传动结构与所述滚轮传动连接,所述同步带传动结构设置在两所述倾斜支板远离彼此的另一侧。
6、优选地,两所述倾斜支板之间的夹角为140°。
7、优选地,所述伸缩装置包括设置在所述左支架上的转动电机、设置在所述右支架上的螺纹座,所述转动电机的输出轴连接有丝杆,所述丝杆与所述螺纹座螺纹连接。
8、优选地,所述伸缩装置还包括设置在所述左支架上的导向杆和设置在所述右支架上的导向座,所述导向杆与导向座滑动连接,所述导向杆与所述丝杆平行。
9、优选地,所述右支架的倾斜支板设置有与所述导向杆对应的避让孔。
10、优选地,还包括摄像头,所述摄像头通过电动云台连接在所述左支架的u型安装台上;所述摄像头包括红外摄像机、可见光摄像机。
11、优选地,两个所述测距传感器均设置在所述u型安装台上,且两个所述测距传感器分别朝向所述u型安装台的左前下方和右前下方,使两个所述测距传感器在管道内壁上的测距目标点分别位于机器人两侧所述滚轮的前方。
12、优选地,所述u型安装台还设置有温度传感器、湿度传感器、可燃气体传感器。
13、优选地,所述避障装置还包括朝向机器人正前方的测距传感器。
14、本发明的有益效果是:利用倾斜支板实现侧部支撑,并将两倾斜支板设置成八字形,具有较大的下方空间,便于避让电缆及体积较小的障碍物;避障装置可实时测量机器人前方区域的管道横向距离,以及时改变自身横向宽度,在遇到管道因外力发生变形导致管道内空间变小的情况下,机器人能够通过变形处继续作业。
技术特征:
1.一种规避障碍的管道内电缆巡检机器人,其特征在于,包括:
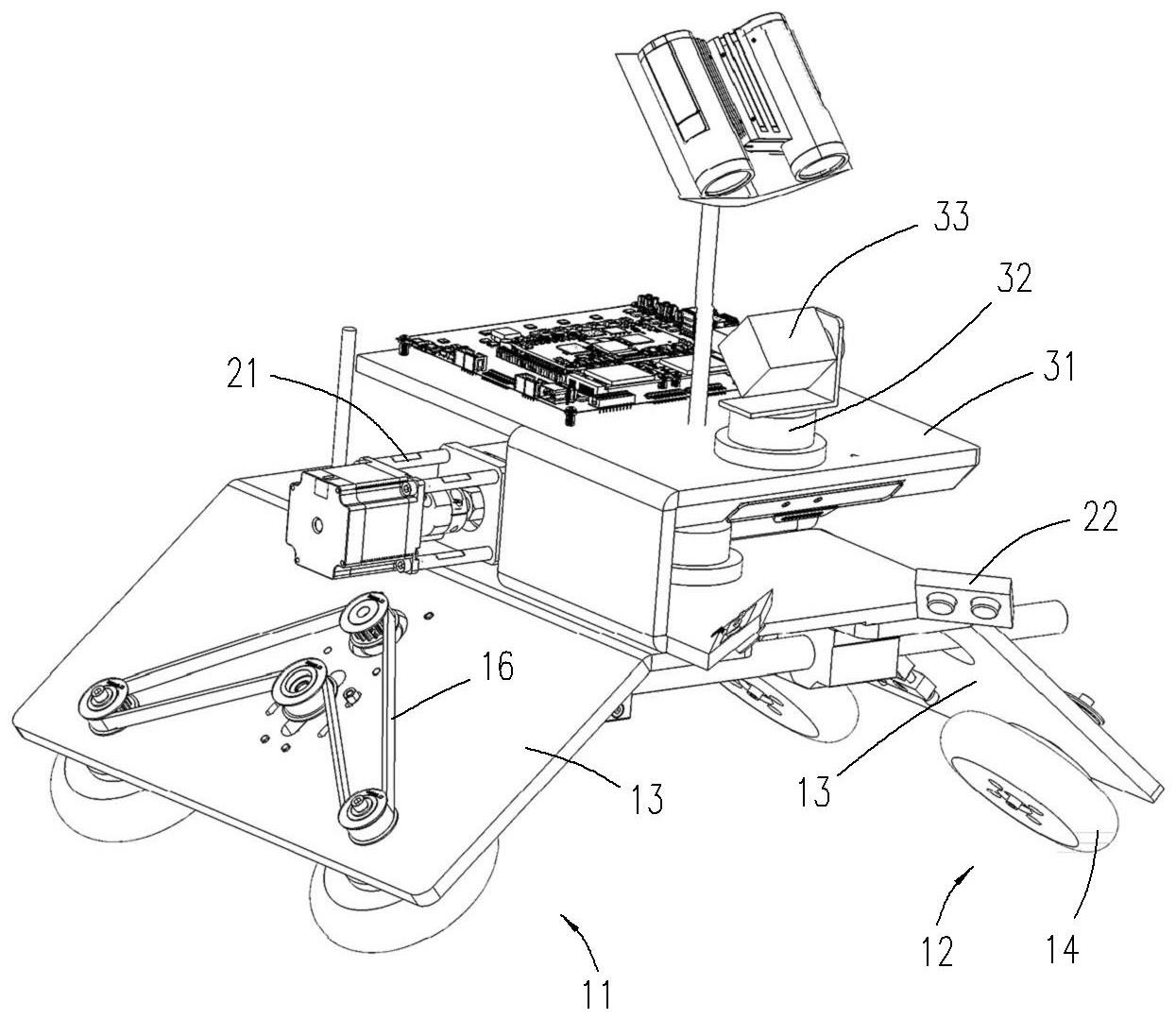
2.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述驱动电机(15)及滚轮(14)设置在两所述倾斜支板(13)朝向彼此的一侧,所述驱动电机(15)通过同步带传动结构(16)与所述滚轮(14)传动连接,所述同步带传动结构(16)设置在两所述倾斜支板(13)远离彼此的另一侧。
3.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:两所述倾斜支板(13)之间的夹角为140°。
4.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述伸缩装置(21)包括设置在所述左支架(11)上的转动电机(211)、设置在所述右支架(12)上的螺纹座(212),所述转动电机(211)的输出轴连接有丝杆(213),所述丝杆(213)与所述螺纹座(212)螺纹连接。
5.根据权利要求4所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述伸缩装置(21)还包括设置在所述左支架(11)上的导向杆(214)和设置在所述右支架(12)上的导向座(215),所述导向杆(214)与导向座(215)滑动连接,所述导向杆(214)与所述丝杆(213)平行。
6.根据权利要求5所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述右支架(12)的倾斜支板(13)设置有与所述导向杆(214)对应的避让孔。
7.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:还包括摄像头(33),所述摄像头(33)通过电动云台(32)连接在所述左支架(11)的u型安装台(31)上;所述摄像头(33)包括红外摄像机、可见光摄像机。
8.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:两个所述测距传感器(22)均设置在所述u型安装台(31)上,且两个所述测距传感器(22)分别朝向所述u型安装台(31)的左前下方和右前下方,使两个所述测距传感器在管道内壁上的测距目标点分别位于机器人两侧所述滚轮的前方。
9.根据权利要求9所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述u型安装台(31)还设置有温度传感器、湿度传感器、可燃气体传感器。
10.根据权利要求1所述的一种规避障碍的管道内电缆巡检机器人,其特征在于:所述避障装置还包括朝向机器人正前方的测距传感器。
技术总结
一种规避障碍的管道内电缆巡检机器人,涉及管道巡检设备技术领域,所采用的技术方案包括移动装置和避障装置,移动装置包括左支架和右支架,左支架和右支架均包括倾斜支板、滚轮以及驱动电机,两倾斜支板排列成八字形;避障装置包括设置在左支架和右支架之间的伸缩装置、分别朝向左前方和左前方的两个测距传感器以及与伸缩装置、测距传感器信号连接的控制器。本发明利用倾斜支板实现侧部支撑,并将两倾斜支板设置成八字形,具有较大的下方空间,便于避让电缆及体积较小的障碍物;避障装置可实时测量机器人前方区域的管道横向距离,以及时改变自身横向宽度,在遇到管道因外力发生变形导致管道内空间变小的情况下,机器人能够通过变形处继续作业。
技术研发人员:冯黎兵,张盈盈,张海
受保护的技术使用者:四川水利职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!