便携式机器人充电桩的制作方法
本公开涉及充电桩,尤其是涉及便携式机器人充电桩。
背景技术:
1、机器人充电桩是一种专门用于给机器人提供充电服务的设备,通常由充电底座、电源适配器、控制板、充电线缆和保护外壳等组成。机器人充电桩可以为机器人提供快速、安全、稳定的充电服务,帮助机器人保持长时间的运行能力,并且节省了人工搬运和管理机器人的时间和精力。在工业自动化、家庭服务机器人等领域都有广泛的应用。同时,为了适应不同品牌和型号的机器人,充电桩需要具备较高的兼容性和安全性,以确保机器人能够使用安全可靠的充电方式,避免因充电问题导致的故障和损坏。
2、但是在实际使用中发现,目前的机器人充电桩存在一些缺陷:目前的充电桩大多是固定安装的,这就导致了机器人在电量不足时需要返回充电,而在机器人外出工作时,在电量不足时无法及时进行充电,从而影响了机器人的工作效率。
技术实现思路
1、本公开的目的在于提供便携式机器人充电桩,以解决现有技术中目前的充电桩大多是固定安装的,这就导致了机器人在电量不足时需要返回充电,而在机器人外出工作时,在电量不足时无法及时进行充电,从而影响了机器人工作效率的技术问题。
2、为实现上述目的,本公开采用如下技术方案:
3、本公开提供便携式机器人充电桩,包括:
4、用于对机器人进行充电的充电桩主体;
5、多组支撑板,所述支撑板转动连接在充电桩主体底部;
6、用于带动所述支撑板展开的收展组件,所述收展组件设置于充电桩主体中,所述收展组件具有收起与展开两种状态;
7、用于控制所述收展组件状态的驱动组件,所述驱动组件可将收展组件在收起状态与展开状态中切换。
8、可选的,所述收展组件包括固定连接在支撑板顶部的固定块,所述固定块上转动连接滑动杆,所述滑动杆的外圈套设偏转杆,所述偏转杆远离固定块的一端固定连接第一齿轮,所述充电桩主体中开设第一空腔,所述第一空腔中滑动连接滑块,所述滑块的外侧安装多组第一齿块,所述第一齿块与第一齿轮啮合,用于滑块在移动时带动第一齿块与多组第一齿轮同时啮合转动。
9、可选的,所述滑动杆滑动连接在偏转杆中,用于在偏转时改变长度,所述第一齿轮转动连接在充电桩主体中,用于所述第一齿轮可以保持原位转动。
10、可选的,所述驱动组件包括固定连接在滑块顶部的带动板,所述带动板的顶部设置多组第二齿块,所述第二齿块所在位置设置开设在充电桩主体中的第二空腔,所述第二空腔中转动连接第二齿轮,所述第二齿轮与第二齿块啮合。
11、可选的,所述第二空腔中滑动连接移动板,使得所述移动板可以在移动时不发生偏转,所述移动板靠近第二齿轮的一侧安装多组第三齿块,所述第三齿块与第二齿轮啮合,用于所述移动板在移动时带动第二齿轮与第三齿块啮合从而带动第三齿块转动。
12、可选的,所述移动板的顶部固定连接固定杆,所述固定杆的上端设置螺纹段,螺纹段在移动时带动固定杆滑动,所述螺纹段的外圈套设转动套,所述转动套转动连接在充电桩主体中,所述螺纹段与转动套螺纹连接,所述转动套在保持原位转动时带动螺纹段沿着自身长度方向移动。
13、可选的,所述充电桩主体中还设置转动杆,所述转动杆在充电桩主体中保持原位转动,所述转动杆的一端固定连接主动锥齿轮,所述转动套的外圈还固定安装从动锥齿轮,所述主动锥齿轮与从动锥齿轮啮合,用于改变转动的方向。
14、可选的,所述转动杆远离主动锥齿轮的一端固定连接转动把,所述转动把的设置便于转动转动杆。
15、可选的,所述支撑板的个数为四,所述滑块为十字形设置,用于同时带动多组所述偏转杆转动。
16、可选的,所述充电桩主体的外侧开设多组与支撑板对应的凹槽,用于所述支撑板可以收到凹槽中,使得所述充电桩主体的外侧平整,便于携带。
17、与现有技术相比较,本公开的有益效果在于:本公开的便携式机器人充电桩,通过驱动组件中设置的转动把,在转动转动把时通过转动杆带动主动锥齿轮转动与从动锥齿轮啮合,从而使得转动套开始转动,同时转动套与螺纹段螺纹连接带动螺纹段向下移动,从而通过固定杆带动移动板向下移动,通过第三齿块与第二齿轮啮合带动第二齿轮顺时针转动,从而带动与第二齿轮啮合的第二齿块向上移动,此时带动板带动滑块向上移动,同时滑块上设置的第一齿块与第一齿轮啮合,带动多组第一齿轮转动同时,此时偏转杆偏转,从而带动支撑板转动打开。
18、进一步的,本公开的便携式机器人充电桩,可以转动转动把使得多组支撑板展开,从而加大了充电桩主体与地面的接触面积,使得放置平稳,便于将充电桩主体携带外出时放置使用。
技术特征:
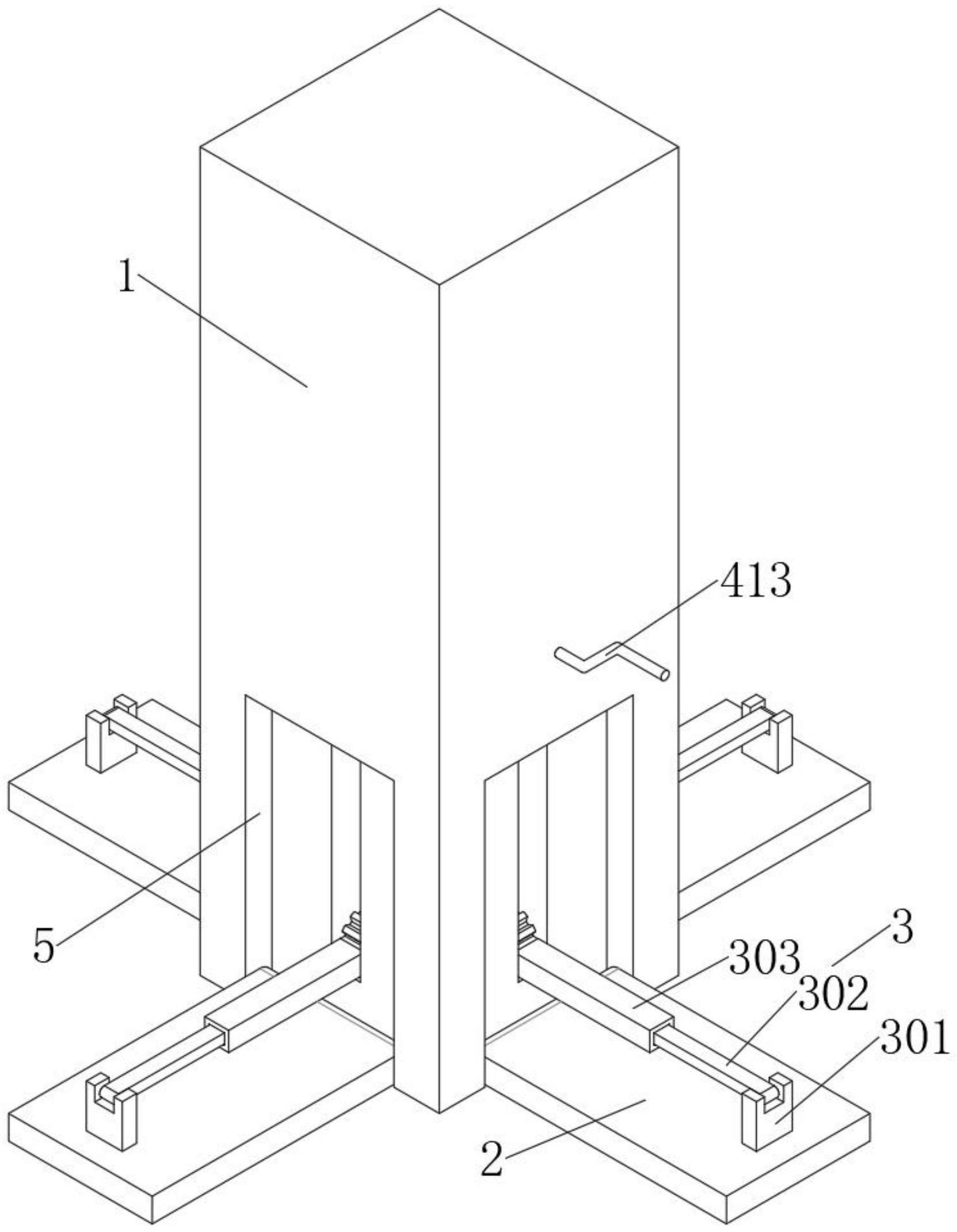
1.便携式机器人充电桩,其特征在于,包括:
2.根据权利要求1所述的便携式机器人充电桩,其特征在于:所述收展组件(3)包括固定连接在支撑板(2)顶部的固定块(301),所述固定块(301)上转动连接滑动杆(302),所述滑动杆(302)的外圈套设偏转杆(303),所述偏转杆(303)远离固定块(301)的一端固定连接第一齿轮(304),所述充电桩主体(1)中开设第一空腔(305),所述第一空腔(305)中滑动连接滑块(306),所述滑块(306)的外侧安装多组第一齿块(307),所述第一齿块(307)与第一齿轮(304)啮合。
3.根据权利要求2所述的便携式机器人充电桩,其特征在于:所述滑动杆(302)滑动连接在偏转杆(303)中,所述第一齿轮(304)转动连接在充电桩主体(1)中。
4.根据权利要求2所述的便携式机器人充电桩,其特征在于:所述驱动组件(4)包括固定连接在滑块(306)顶部的带动板(401),所述带动板(401)的顶部设置多组第二齿块(402),所述第二齿块(402)所在位置设置开设在充电桩主体(1)中的第二空腔(403),所述第二空腔(403)中转动连接第二齿轮(404),所述第二齿轮(404)与第二齿块(402)啮合。
5.根据权利要求4所述的便携式机器人充电桩,其特征在于:所述第二空腔(403)中滑动连接移动板(405),所述移动板(405)靠近第二齿轮(404)的一侧安装多组第三齿块(406),所述第三齿块(406)与第二齿轮(404)啮合。
6.根据权利要求5所述的便携式机器人充电桩,其特征在于:所述移动板(405)的顶部固定连接固定杆(407),所述固定杆(407)的上端设置螺纹段(408),所述螺纹段(408)的外圈套设转动套(409),所述转动套(409)转动连接在充电桩主体(1)中,所述螺纹段(408)与转动套(409)螺纹连接。
7.根据权利要求6所述的便携式机器人充电桩,其特征在于:所述充电桩主体(1)中还设置转动杆(410),所述转动杆(410)的一端固定连接主动锥齿轮(411),所述转动套(409)的外圈还固定安装从动锥齿轮(412),所述主动锥齿轮(411)与从动锥齿轮(412)啮合。
8.根据权利要求7所述的便携式机器人充电桩,其特征在于:所述转动杆(410)远离主动锥齿轮(411)的一端固定连接转动把(413)。
9.根据权利要求2所述的便携式机器人充电桩,其特征在于:所述支撑板(2)的个数为四,所述滑块(306)为十字形设置。
10.根据权利要求1所述的便携式机器人充电桩,其特征在于:所述充电桩主体(1)的外侧开设多组与支撑板(2)对应的凹槽(5)。
技术总结
本公开的便携式机器人充电桩,涉及充电桩技术领域,以解决现有技术中充电桩大多是固定安装的,导致了机器人在电量不足时需要返回充电,无法及时充电影响机器人工作效率的问题。包括用于对机器人进行充电的充电桩主体;多组支撑板,所述支撑板转动连接在充电桩主体底部;用于带动所述支撑板展开的收展组件,所述收展组件设置于充电桩主体中,所述收展组件具有收起与展开两种状态;用于控制所述收展组件状态的驱动组件,所述驱动组件可将收展组件在收起状态与展开状态中切换。本公开的便携式机器人充电桩,可以转动转动把使得多组支撑板展开,从而加大了充电桩主体与地面的接触面积,使得放置平稳,便于将充电桩主体携带外出时放置使用。
技术研发人员:盛景鑫,支涛
受保护的技术使用者:北京云迹科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!