基于动态切换滑模观测器的SDSEM扰动估计方法
本申请涉及正弦型电励磁双凸极电机领域,尤其是一种基于动态切换滑模观测器的sdsem扰动估计方法。
背景技术:
1、正弦型电励磁双凸极电机(sdsem)是一种新型电励磁无刷电机,具有结构简单、励磁可控、散热好等优点,在飞机起动发电系统、新能源发电以及汽车起动发电系统等领域具有广阔的应用前景。
2、在上述应用背景下,正弦型电励磁双凸极电机所处工况通常复杂多变,易受各种不确定性扰动(包括电机参数摄动和外部负载扰动)的影响。在电机高性能控制领域,系统不确定性扰动是影响电机系统控制性能的重要因素,对实现高动态性能速度控制起着关键作用。如果能够实时地估计出电机系统扰动,就可以提高正弦型电励磁双凸极电机系统的控制性能,尤其是控制精度和鲁棒性能等。
3、滑模扰动观测器技术是实现电机系统扰动实时估计的一种有效方法,目前,已有学者做了相关研究。王毅等公开的“一种用于伺服系统控制的滑模扰动观测器的设计方法”(中国,公开日:2018年08月31日,公开号:106067747b)专利中公开了一种用于伺服系统控制的滑模扰动观测器的设计方法,其通过所设计的滑模扰动观测器能够实现直流电机伺服系统低速时对死区、爬行以及自振荡等非线性因素的抑制,但是其采用符号函数会引起较大的滑模抖振,从而恶化观测器的观测精度,且其实现过于复杂。黄守道等公开的“一种基于高阶滑模观测器的电机机械参数辨识方法及系统”(中国,公开日:2020年06月30日,公开号:109873586b)专利中公开了一种基于高阶滑模观测器的电机机械参数辨识方法及系统,其设计的高阶滑模观测器具有较高的电机机械参数辨识精度和较强的系统鲁棒性,但是其只能用于系统机械参数的估计,且存在着可调参数较多、实现过程过于复杂的缺陷,限制了其应用。目前的电机系统滑模扰动观测器技术往往存在滑模抖振大、可调参数多以及实现过程复杂等缺陷。
技术实现思路
1、本申请人针对上述问题及技术需求,提出了一种基于动态切换滑模观测器的sdsem扰动估计方法,本申请的技术方案如下:
2、一种基于动态切换滑模观测器的sdsem扰动估计方法,该sdsem扰动估计方法包括:
3、建立正弦型电励磁双凸极电机包含集总扰动项d(t)的运动方程,包含集总扰动项的运动方程与正弦型电励磁双凸极电机的机械角速度实际值ωm相关,集总扰动项d(t)用于表征正弦型电励磁双凸极电机随着时间t受到的电机参数摄动和外部负载扰动;
4、根据包含集总扰动项的运动方程设计速度估计方程,速度估计方程用于得到正弦型电励磁双凸极电机的机械角速度估计值
5、根据包含集总扰动项的运动方程和速度估计方程得到角速度误差与集总扰动项d(t)的表达式;
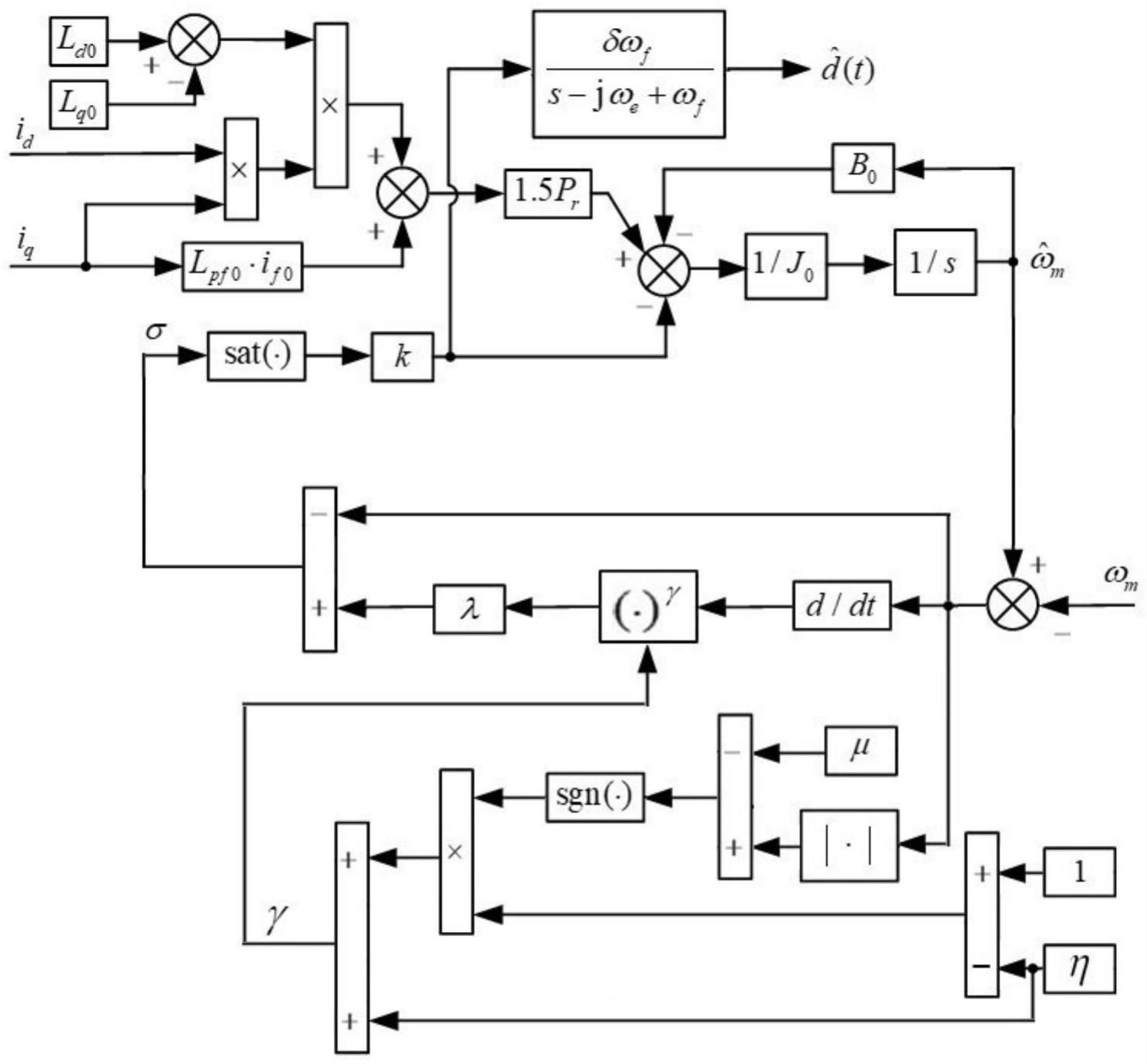
6、根据角速度误差与集总扰动项d(t)的表达式设计针对集总扰动项d(t)的滑模扰动观测器,利用滑模扰动观测器对集总扰动项进行扰动估计;
7、其中,滑模扰动观测器基于动态切换滑模面σ构建,动态切换滑模面σ在线性滑模面和非奇异终端滑模面之间动态切换,当正弦型电励磁双凸极电机的系统状态偏离平衡点达到预定偏离程度时,动态切换滑模面σ表现为线性滑模面;当正弦型电励磁双凸极电机的系统状态偏离平衡点未达到预定偏离程度时,动态切换滑模面σ表现为非奇异终端滑模面。
8、本申请的有益技术效果是:
9、本申请公开了一种基于动态切换滑模观测器的sdsem扰动估计方法,该方法基于动态切换滑模面设计用于对表征电机参数摄动和外部负载扰动的集总扰动项进行估计的滑模扰动观测器,动态切换滑模面根据系统状态偏离平衡点的偏离程度在线性滑模面和非奇异终端滑模面之间动态平滑切换,具备线性滑模面和快速终端滑模面的综合优点,且动态切换滑模面具有快速收敛和无抖振切换的优点,能够较好地解决传统滑模扰动观测器存在的滑模抖振大、观测精度较差的问题,且实现过程较为简单。
10、进一步的,该方法在设计滑模扰动观测器时,引入饱和函数来进一步减少系统进入稳态后的稳态抖振,进一步改善滑模扰动观测器的观测性能。
11、另外该方法在设计滑模扰动观测器时,还引入零相移滤波器,可以无幅值衰减和相位延迟的通过中心频率分量,同时对其它频率分量具有良好的滤波特性,具有较好的观测精度、响应速度以及鲁棒性能。
技术特征:
1.一种基于动态切换滑模观测器的sdsem扰动估计方法,其特征在于,所述sdsem扰动估计方法包括:
2.根据权利要求1所述的sdsem扰动估计方法,其特征在于,所述动态切换滑模面σ的表达式为:
3.根据权利要求1或2所述的sdsem扰动估计方法,其特征在于,设计基于动态切换滑模面σ的滑模扰动观测器包括:
4.根据权利要求3所述的sdsem扰动估计方法,其特征在于,设计基于动态切换滑模面σ的滑模扰动观测器还包括:
5.根据权利要求4所述的sdsem扰动估计方法,其特征在于,
6.根据权利要求2所述的sdsem扰动估计方法,其特征在于,λ>0、μ>0、1<η<1.5。
7.根据权利要求1所述的sdsem扰动估计方法,其特征在于,建立得到的所述正弦型电励磁双凸极电机包含集总扰动项d(t)的运动方程为:
8.根据权利要求7所述的sdsem扰动估计方法,其特征在于,根据所述包含集总扰动项的运动方程设计得到的速度估计方程为:
9.根据权利要求8所述的sdsem扰动估计方法,其特征在于,设计所述滑模扰动观测器包括:
10.根据权利要求7所述的sdsem扰动估计方法,其特征在于,所述建立正弦型电励磁双凸极电机包含集总扰动项的运动方程包括:
技术总结
本申请公开了一种基于动态切换滑模观测器的SDSEM扰动估计方法,涉及正弦型电励磁双凸极电机领域,该方法从正弦型电励磁双凸极电机包含集总扰动项的运动方程出发,基于动态切换滑模面设计用于对表征电机参数摄动和外部负载扰动的集总扰动项进行估计的滑模扰动观测器,动态切换滑模面根据系统状态偏离平衡点的偏离程度在线性滑模面和非奇异终端滑模面之间动态切换,具备线性滑模面和快速终端滑模面的综合优点,具有快速收敛和无抖振切换的优点,能够较好地解决传统滑模扰动观测器存在的滑模抖振大、观测精度较差的问题,且实现过程较为简单。
技术研发人员:于晓东,周波,蒋思远,熊磊,史宏俊
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!