一种双向粘滑式驱动器及其驱动方法
本发明涉及精密驱动与定位,具体涉及一种基于单压电模块的双向粘滑式驱动器及其驱动方法。
背景技术:
1、压电陶瓷元件是一种基于逆压电效应,将电能转换为机械能的驱动元件。该元件由于具有精度高、响应速度快、输出力大、结构紧凑等优点,在精密定位、微纳制造、生物工程、微纳米机器人等领域应用广泛,并可实现微纳米级的定位精度。但是,压电陶瓷元件的输出位移只有自身长度的1/1000,限制了它的应用。为了增大行程,各种基于压电陶瓷元件的步进式驱动器被开发出来。根据驱动原理可将现有压电驱动器分为尺蠖式驱动器、超声式驱动器以及粘滑式驱动器;其中:尺蠖式驱动器需要多个压电陶瓷元件相互配合,具有结构和控制策略复杂的缺陷;超声式驱动器需要在共振频率下工作,具有严重的磨损及发热问题;而粘滑式驱动器相对于上述两种类型的压电驱动器具有以下优势:(1)其结构通常由定子、动子以及压电陶瓷元件三部分构成,具有结构简单、控制方便的特点;(2)结构中的定子通常是包含柔性铰链的柔顺结构,具有无摩擦、无间隙、运动精度高的特点;(3)压电陶瓷元件在施加电源的激励下,驱动定子做周期性往复运动,并通过定子与动子之间的静摩擦、动摩擦差异,使得动子产生相应的平移运动或者旋转运动,通过周期循环步进位移,理论上可以实现无限长的行程。
2、目前,现有粘滑式驱动器,按设计原理可以分为惯性摩擦原理、惯性冲击原理、寄生运动原理。其中,依据惯性摩擦原理和惯性冲击原理设计的驱动器大都负载能力较差、输出速度低;依据寄生运动原理设计的驱动器虽然有效地解决了这两个问题,但难以实现双向运动,只能对称地布置两套驱动结构,进而增大了结构尺寸以及控制的复杂性,严重影响了实际应用。
3、因此,亟需提供一种仅通过设置单压电模块即可实现双向运动的粘滑式压电驱动器及其驱动方法。
技术实现思路
1、基于现有粘滑式驱动器存在的上述缺陷和不足,本发明所要解决的技术问题是提供一种根据滚动粘滑驱动原理设计的双向粘滑式驱动器,该驱动器仅通过设置单压电模块即可驱动实现双向粘滑运动,所述双向粘滑运动包括正向粘滑运动和反向粘滑运动,且在驱动过程中定子与动子之间的相对位置和接触条件始终不变,进而确保了正、反向驱动过程的一致性,可以有效提高驱动器的输出稳定性及输出精度。
2、本发明解决上述技术问题所采用的技术方案是:一种双向粘滑式驱动器,包括压电陶瓷元件、定子以及动子;其中:
3、所述压电陶瓷元件数量为1;
4、所述定子上设有圆弧形接触部,且所述定子可在压电陶瓷元件的驱动下,绕其转动中心进行顺时针或逆时针转动;
5、所述动子为在定子驱动下可进行线性输出的直线运动模块或可进行转动输出的转动运动模块,所述动子与定子之间通过定子的圆弧形接触部相接触;
6、所述定子的圆弧形接触部的圆心与定子的转动中心相重合。
7、作为优选,所述定子设置为等腰梯形柔性机构,所述等腰梯形柔性机构包括圆弧形接触部、四个第一转动柔性铰链、两个柔性梁以及固定端;其中:
8、所述圆弧形接触部为驱动端,用于与动子相接触;四个所述第一转动柔性铰链中:其中两个分别与圆弧形接触部以及柔性梁相连接,另外两个分别与柔性梁以及固定端相连接;
9、四个所述第一转动柔性铰链所在点的连线可形成等腰梯形,等腰梯形中两腰边延长线的交点与圆弧形接触部的圆心相重合,所述等腰梯形中靠近固定端的底边为短边,靠近圆弧形接触部的顶边为长边。
10、作为优选,所述固定端上还设有与等腰梯形柔性机构相连接的直线导向柔性机构,所述直线导向柔性机构包括四个分别与固定端相连接的簧片型柔性铰链,四个所述簧片型柔性铰链中两两为一组,各组中的两个簧片型柔性铰链平行设置,两组簧片型柔性铰链之间连接设置刚性主体;
11、所述压电陶瓷元件加载于刚性主体及固定端上,且位于所述直线导向柔性机构的中心轴线位置上。
12、作为优选,所述等腰梯形柔性机构与直线导向柔性机构之间通过柔性转动机构相连接,所述柔性转动机构包括两个第二转动柔性铰链以及刚性部,所述刚性部分别通过两个第二转动柔性铰链与所述等腰梯形柔性机构以及直线导向柔性机构相连接。
13、作为优选,所述压电陶瓷元件通过调节螺栓固定在等腰梯形柔性机构的固定端及直线导向柔性机构上;通过旋拧调节螺栓还可实现压电陶瓷元件与直线导向柔性机构之间预紧力调节。
14、作为优选,所述动子为直线运动模块,包括直线导轨以及滑块,所述滑块可沿直线导轨的长度方向进行滑动。
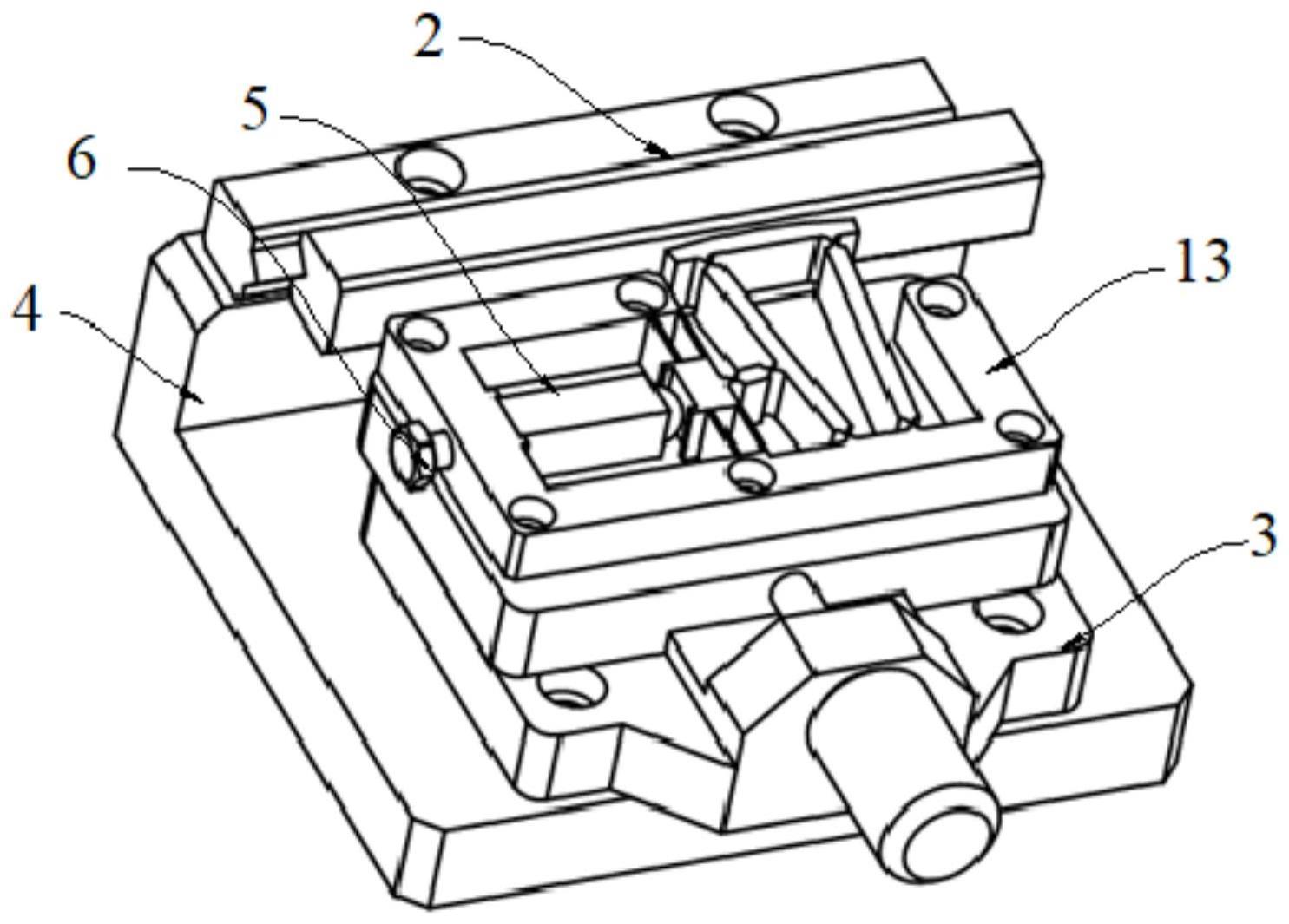
15、作为优选,所述驱动器还包括预紧调节模块,所述预紧调节模块包括调节手柄、移动块以及基板;其中:
16、所述调节手柄通过手柄安装座装配于基板上,所述移动块滑配安装于基板上并与调节手柄相连接,所述调节手柄可在外力作用下带动移动块沿调节手柄的轴线方向滑动;
17、所述等腰梯形柔性机构通过固定端固定于移动块上。
18、作为优选,所述驱动器还包括驱动器安装座,所述驱动器安装座由底板和垂直设置于底板上的侧板构成;所述预紧调节模块安装于底板上,直线运动模块安装于侧板上;通过旋转调节手柄可将等腰梯形柔性机构中的圆弧接触部逐渐接触并挤压在位于侧板上的直线运动模块上。
19、本发明还提供了一种基于上述驱动器的滚动粘滑驱动方法,包括步骤如下:
20、s1,通过预紧调节模块调节等腰梯形柔性机构中圆弧接触部与滑块之间的接触条件;
21、s2,向压电陶瓷元件中输入与驱动方向相对应的锯齿波激励电压信号,实现相应驱动方向的滚动粘滑运动。
22、进一步地,当锯齿波激励电压信号形状为电压缓慢升高、迅速下降时,驱动器可实现正向滚动粘滑运动;当锯齿波激励电压信号形状为电压迅速升高、缓慢下降时,驱动器可实现反向滚动粘滑运动。
23、本发明同现有技术相比具有以下优点及效果:
24、本发明所述的双向粘滑式驱动器中,由圆弧形接触部、四个第一转动柔性铰链、两个柔性梁及固定端构成的等腰梯形柔性机构中,四个第一转动柔性铰链所在点的连线可构成等腰梯形;在驱动过程中,圆弧形接触部作为驱动端,用于与动子相接触,根据等腰梯形的特性,在小变形的情况下,圆弧形接触部可绕着两个柔性梁中心轴线的交点旋转,同时该交点与等腰梯形柔性机构的转动中心重合;因此,当等腰梯形柔性机构围绕其转动中心逆时针转动或顺时针转动时,等腰梯形柔性机构与动子之间通过圆弧面保持滚动接触,相互之间的接触条件始终不变,这种特性保证了正向运动和反向运动时受力条件的一致性;进而相对于现有通过设置多套驱动结构、多个压电陶瓷元件实现的双向驱动运动,本发明设计的双向粘滑式压电驱动器,只需要简单地改变电压激励信号的形状,就能实现基于单压电陶瓷元件+一套驱动机构驱动的双向滚动粘滑运动,结构更加简单,实现双向运动更加容易。
技术特征:
1.一种双向粘滑式驱动器,其特征在于,包括压电陶瓷元件、定子以及动子;其中:
2.根据权利要求1所述的双向粘滑式驱动器,其特征在于,所述定子设置为等腰梯形柔性机构,所述等腰梯形柔性机构包括所述圆弧形接触部、四个第一转动柔性铰链、两个柔性梁以及固定端;其中:
3.根据权利要求1所述的双向粘滑式驱动器,其特征在于,所述固定端上还设有与等腰梯形柔性机构相连接的直线导向柔性机构,所述直线导向柔性机构包括四个分别与固定端相连接的簧片型柔性铰链,四个所述簧片型柔性铰链两两为一组,各组中的两个簧片型柔性铰链平行设置,两组簧片型柔性铰链之间连接设置刚性主体;
4.根据权利要求3所述的双向粘滑式驱动器,其特征在于,所述等腰梯形柔性机构与直线导向柔性机构之间通过柔性转动机构相连接,所述柔性转动机构包括两个第二转动柔性铰链以及刚性部,所述刚性部分别通过两个第二转动柔性铰链与所述等腰梯形柔性机构以及直线导向柔性机构相连接。
5.根据权利要求3或4所述的双向粘滑式驱动器,其特征在于,所述压电陶瓷元件通过调节螺栓固定在等腰梯形柔性机构的固定端及直线导向柔性机构上;通过旋拧调节螺栓还可实现压电陶瓷元件与直线导向柔性机构之间预紧力调节。
6.根据权利要求5所述的双向粘滑式驱动器,其特征在于,所述动子为直线运动模块,包括直线导轨以及滑块,所述滑块可沿直线导轨的长度方向进行滑动。
7.根据权利要求6所述的双向粘滑式驱动器,其特征在于,所述驱动器还包括预紧调节模块,所述预紧调节模块包括调节手柄、移动块以及基板;其中:
8.根据权利要求7所述的双向粘滑式驱动器,其特征在于,所述驱动器还包括驱动器安装座,所述驱动器安装座由底板和垂直设置于底板上的侧板构成;所述预紧调节模块安装于底板上,直线运动模块安装于侧板上;通过旋转调节手柄可将等腰梯形柔性机构中的圆弧接触部逐渐接触并挤压在位于侧板上的直线运动模块上。
9.一种基于权利要求7至8任一所述驱动器的滚动粘滑驱动方法,其特征在于,包括步骤如下:
10.根据权利要求9所述的驱动方法,其特征在于,锯齿波激励电压信号形状为电压缓慢升高、迅速下降时,驱动器实现正向滚动粘滑运动;锯齿波激励电压信号形状为电压迅速升高、缓慢下降时,驱动器实现反向滚动粘滑运动。
技术总结
本发明涉及一种双向粘滑式驱动器及其驱动方法,所述驱动器包括压电陶瓷元件、定子以及动子;其中:定子上设有圆弧形接触部,且定子可在压电陶瓷元件的驱动下,绕其转动中心进行顺时针或逆时针转动;所述动子为在定子驱动下可进行线性输出的直线运动模块或可进行转动输出的转动运动模块,所述动子与定子之间通过定子的圆弧形接触部相接触;所述定子的圆弧形接触部的圆心与定子的转动中心相重合。相对于现有通过多套驱动结构、多个压电陶瓷元件实现双向运动的压电驱动器,本发明所述双向粘滑式驱动器,只需要简单地改变电压激励信号的形状,就能实现用一个压电陶瓷元件驱动的双向滚动粘滑运动,且结构更加简单,实现双向运动更加容易。
技术研发人员:史超阳,龙敦发
受保护的技术使用者:天津大学浙江国际创新设计与智造研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!