一种改进转速环PID的IPMSM无传感器控制方法
本发明属于永磁同步电机控制,具体地说,尤其涉及一种改进转速环pid的ipmsm无传感器控制方法。
背景技术:
1、内置式永磁同步电机(ipmsm)凭借其高功度密度、高效率以及体积小易控制等优点广泛的应用在现代动力系统中,高性能的ipmsm的控制系统也成为了众多学者研究的热点。在对控制性能要求比较高的系统中,经常采用带有反馈的双闭环控制。在对ipmsm的控制中,最常见的控制就是pid控制,由于其结构简单且控制性能较好,所以在控制领域有着很广泛的应用。由于电机属于一种非常复杂的非线性系统,电机在运行时其内部参数会有所改变,传统的pid控制难以实时调节其参数以适应电机的运行状态。
2、伴随着智能控制技术的发展,越来越多的场合对电机的控制性能也有着更高的要求,国内外众多学者研究了智能控制与传统控制相结合的方法,其中智能控制中常见的方法主要有一下三种:模糊控制、神经网络控制以及智能优化算法。对于电机这种复杂的非线性系统单一的控制算法难以满足高性能的控制需要。
技术实现思路
1、本发明要解决的技术问题是克服现有技术的不足,提供了一种改进转速环pid的ipmsm无传感器控制方法,其将smith-fcmac-pid控制器替代电机转速环中的传统的pid控制器以提高电机的控制性能。
2、为了实现上述目的,本发明是采用以下技术方案实现的:
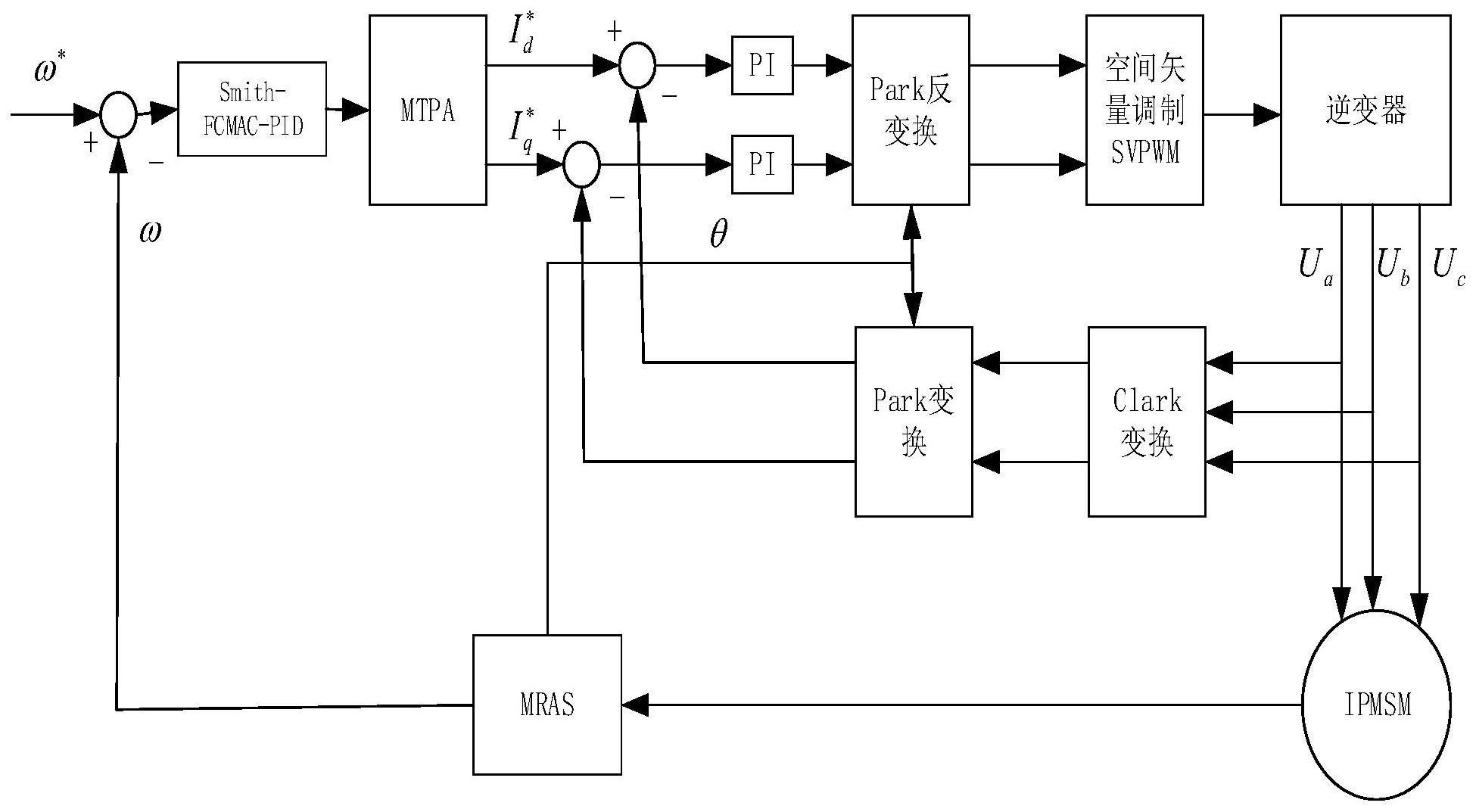
3、一种改进转速环pid的ipmsm无传感器控制方法,包括以下步骤:
4、步骤1:通过设计mras无传感器控制方法来获得ipmsm的转子角速度估计值ω,其包括参考模型、可调模型和自适应律三部分;
5、步骤2:建立smith-fcmac-pid控制器,将获得的电机转速信息、电机转速给定值以及转速误差作为输入,得到输出电压
6、步骤3:建立mtpa控制,得到电磁转矩与dq轴电流关系,获得dq电流
7、步骤4:将步骤3中mtpa输出的dq电流与电流反馈量id、iq的差值输入电流环的pi调节器后得到输出电压
8、步骤5:将输出电压经过park变换生成两相静止坐标系下的两相控制电压采用七段式svpwm算法得到pwm调制波控制三相全桥逆变器,进而控制内置式永磁同步电机的运行。
9、优选地,步骤1中mras无传感器控制根据内置式永磁同步电机的数学模型建立参考模型和可调模型,采用popov超稳定性理论进行自适应律的推导从而获得电机转速和转子位置信息。
10、优选地,步骤2中模糊小脑模型(fcmac)神经网络由输入层、模糊化层、模糊相联层、模糊归一层、输出层五层组成,其中,选取高斯基函数作为模糊隶属关系:
11、
12、其中,cj为隶属度函数的中心值,σj为隶属度函数的宽度。
13、优选地,步骤2中smith-fcmac-pid控制器,其在t=0时刻,权重w=0,u(t)=up(t),而此时fcmac的输出ufc=0,给定电机转速r(t)经模糊量化之后,经过地址映射和记忆找到对应的隶属度和权值的存储位置,最后经过fcmac函数计算得到网络的输出ufc;
14、比较ufc(t)和u(t)将其误差作为学习指标,进行学习更新权值w,然后再循环进行上述过程,直到ufc(t)和u(t)的误差达到最小;
15、其中,up(t)为pid控制器的输出,ufc(t)为fcmac神经网络的输出。
16、优选地,步骤2中smith-fcmac-pid控制器,其中smith预估补偿环节的表达式为:
17、us(t)=ufc(t)(1-e-τs)。 (2)
18、优选地,步骤3中mtpa控制采用公式法来获得电磁转矩与dq轴电流关系式,从数学角度上来看,可以将其等效为拉格朗日求极值的问题,即:
19、
20、由式(3)得到电磁转矩与dq轴电流关系表达式如下:
21、
22、其中,te是电机的电磁转矩;p为极对数,is为电机定子电流。
23、与现有技术相比,本发明的有益效果是:
24、1、本发明将fcmac神经网络与pid控制器相结合并行控制电机,并引入smith预估补偿算法来补偿神经网络中带来的时间延迟,有效提高了系统的动态性能,采用模型参考自适应无传感器控制方法,有效避免了机器传感器带来的可靠性不高的问题,有效地提高了系统的鲁棒性;
25、2、本发明充分利用模糊小脑模型较强的局部泛化能力以及快速的学习能力,与pid控制器相结合来提高系统的快速性以及稳定性,同时为了补偿神经网络给系统带来的时间延迟,引入smith预估补偿器,提高了系统的响应速度,通过仿真验证,证明了该方法比传统的pid控制有更好的响应性能,有效提高了系统的动态响应特性以及鲁棒性。
技术特征:
1.一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:步骤1中mras无传感器控制根据内置式永磁同步电机的数学模型建立参考模型和可调模型,采用popov超稳定性理论进行自适应律的推导从而获得电机转速和转子位置信息。
3.根据权利要求2所述的一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:步骤2中模糊小脑模型(fcmac)神经网络由输入层、模糊化层、模糊相联层、模糊归一层、输出层五层组成,其中,选取高斯基函数作为模糊隶属关系:
4.根据权利要求3所述的一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:步骤2中smith-fcmac-pid控制器,其在t=0时刻,权重w=0,u(t)=up(t),而此时fcmac的输出ufc=0,给定电机转速r(t)经模糊量化之后,经过地址映射和记忆找到对应的隶属度和权值的存储位置,最后经过fcmac函数计算得到网络的输出ufc;
5.根据权利要求4所述的一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:步骤2中smith-fcmac-pid控制器,其中smith预估补偿环节的表达式为:
6.根据权利要求5所述的一种改进转速环pid的ipmsm无传感器控制方法,其特征在于:步骤3中mtpa控制采用公式法来获得电磁转矩与dq轴电流关系式,从数学角度上来看,可以将其等效为拉格朗日求极值的问题,即:
技术总结
本发明公开了一种改进转速环PID的IPMSM无传感器控制方法,其属于永磁同步电机控制技术领域。包括设计模糊小脑模型神经网络PID并联控制器,同时引入史密斯预估补偿器补偿模糊小脑模型神经网络带来的延迟现象,构成Smith‑FCMAC‑PID控制器,该控制器在t=0时刻首先由PID控制器进行控制,随着FCMAC的学习Smith‑FCMAC‑PID控制器主要由FCMAC神经网络进行控制,其中Smith预估补偿为一个时间补偿函数,有效提高了电机的响应速度。采用模型参考自适应无传感器控制方法来获得电机的转速和转子位置信息,提高了系统的可靠性;本发明不仅提高了系统的快速性和鲁棒性,也提高了电机转速以及转子位置的跟踪精度。
技术研发人员:杨梦臻
受保护的技术使用者:上海应用技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!