一种低压多轴机器人驱动装置及其短路检测装置的制作方法
本发明涉及电路,特别是涉及一种低压多轴机器人驱动装置及其短路检测装置。
背景技术:
1、多轴机器人的每个轴都配有单独的电机,并且不同的电机配置不一定相同,进行短路保护时,需要对每个轴的电机动力线都进行检测和保护。由于多轴机器人关节机构有防锈措施,电机动力线与大地的短路情况有时发生不彻底,使得短路保护系统经常不能被及时触发,导致器件损坏。因此需要一种多轴机器人短路保护单元,其能够灵敏地检测电机动力线短路是否发生,一旦发生短路能够及时切断电源,从而保证人身安全和驱动器功率器件安全。
2、请参阅图1,图1为一种现有的电机驱动装置示意图。一种现有的电机驱动装置,包括电流传感器ct0、控制器、母线开关s01和电机驱动模块。所述电流传感器ct0设置在电机动力线上,检测电机动力线的电流值,并将电流值信号传输给控制器;所述控制器接收电流值信号,若电流值信号超过设定的阈值,则判断电机动力线发生短路,并向母线开关s01和电机驱动模块输出断电控制信号;所述母线开关s01设置在直流母线dc bus+上,为常闭开关,当接收到断电控制信号时断开;所述电机驱动模块包括设置在电机动力线上的驱动开关,当接收到断电控制信号时,所述驱动开关断开,使电机停机。
3、这种现有的电机驱动装置,直接检测每条电机动力线的电流值,根据电机动力线的电流大小判断短路是否发生。由于多轴机器人电机数量有多个,给每条电机动力线都配置电流传感器的成本较高,因此这种现有的电机驱动装置不适用于多轴机器人领域。
技术实现思路
1、基于此,本发明的目的在于,提供一种新的实时检测短路情况的低压多轴机器人驱动装置。
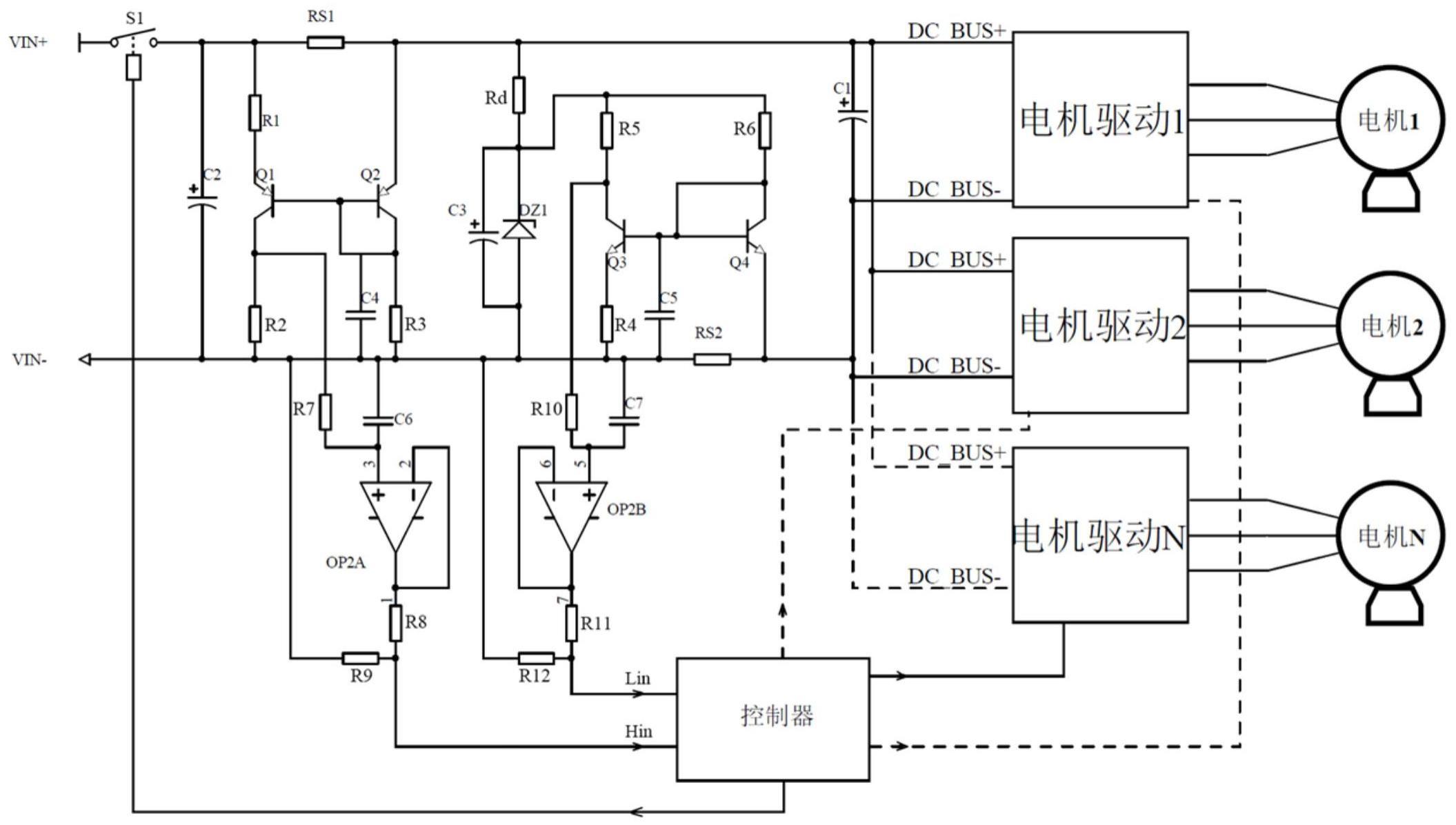
2、一种低压多轴机器人驱动装置,包括正极直流母线、接地的负极直流母线、多个电机、电机驱动模块和短路检测装置;所述电机通过电机驱动模块与正极直流母线和负极直流母线电连接;所述短路检测装置检测正极直流母线和负极直流母线的电流,并根据正极直流母线和负极直流母线的电流判断短路是否发生,若判断短路发生,则切断正极直流母线使电机停机。
3、相对于现有技术,本发明的低压多轴机器人驱动装置通过检测正极直流母线和负极直流母线的电流大小来判断短路情况是否发生,可以同步实时检测多个电机,比直接检测电机动力线电流的大小更加灵敏,能够有效保护功率器件;在直流母线上设置电流采样单元相对现有技术更加节省器件、降低成本。
4、进一步地,所述短路检测装置包括高侧电流采样单元、低侧电流采样单元、控制器和母线通断开关;所述高侧电流采样单元检测正极直流母线的电流,并将正极直流母线的电流转化为第一电压输入至控制器;所述低侧电流采样单元检测负极直流母线的电流,并将负极直流母线的电流转化为第二电压输入至控制器;所述控制器比较第一电压和第二电压的差异判断短路是否发生;若发生短路,所述控制器向母线通断开关发出断电控制信号;所述母线通断开关设置在正极直流母线上,收到断电控制信号即断开。
5、进一步地,所述高侧电流采样单元包括高侧采样电阻、第一三极管、第二三极管、第一电阻、第二电阻和第三电阻;所述第一三极管和第二三极管均为pnp型三极管;所述第一三极管的发射极连接所述第一电阻后与所述高侧采样电阻远离电机的一端连接;所述第一三级管的集电极连接所述第二电阻后与所述负极直流母线连接;所述第一三级管的基极与所述第二三级管的基极连接;所述第二三极管的发射极连接所述高侧采样电阻靠近电机的一端,集电极连接所述第三电阻后与所述负极直流母线连接;所述第二三极管的基极与集电极连接;所述第一电压是指第一三级管集电极的电压。
6、进一步地,所述低侧电流采样单元包括偏置电压提供单元、低侧采样电阻、第三三极管、第四三极管、第四电阻、第五电阻和第六电阻;所述偏置电压提供单元包括稳压管和偏置电阻;所述稳压管的阴极通过所述偏置电阻连接正极直流母线,阳极连接负极直流母线;所述低侧采样电阻串联在负极直流母线上;所述第三三极管和第四三极管均为npn型三极管;所述第三三极管的发射极连接所述第四电阻后与所述低侧采样电阻远离电机的一端连接;所述第三三级管的集电极连接所述第五电阻后与所述稳压管的阴极连接;所述第三三级管的基极与所述第四三级管的基极连接;所述第四三极管的发射极连接所述低侧采样电阻靠近电机的一端,集电极连接所述第六电阻后与所述稳压管的阴极连接;所述第四三极管的基极与集电极连接;所述第二电压是指第三三级管集电极的电压。
7、进一步地,本发明的低压多轴机器人驱动装置还包括高侧电压跟随器和低侧电压跟随器;所述高侧电压跟随器将所述第一电压转化为高侧检测电流输入至控制器;所述低侧电压跟随器将所述第二电压转化为低侧检测电流输入至控制器;所述控制器比较所述高侧检测电流和低侧检测电流的差异判断短路是否发生。
8、进一步地,所述高侧电压跟随器包括第一运算放大器、第七电阻、第八电阻和第九电阻;所述第一运算放大器的正向输入端连接所述第七电阻后连接所述第一三极管的集电极;所述第一运算放大器的反向输入端连接其输出端;所述第八电阻一端连接所述第一运算放大器的输出端,另一端连接所述控制器的高侧检测电流输入端;所述第第九电阻一端连接所述控制器的高侧检测电流输入端,另一端连接负极直流母线;所述高侧检测电流是指控制器的高侧检测电流输入端的电流。
9、进一步地,所述低侧电压跟随器包括第二运算放大器、第十电阻、第十一电阻和第十二电阻;所述第二运算放大器的正向输入端连接所述第十电阻后连接第三三极管的集电极;所述第二运算放大器的反向输入端连接其输出端;所述第十一电阻一端连接所述第二运算放大器的输出端,另一端连接所述控制器的低侧检测电流输入端;所述第十二电阻一端连接所述控制器的低侧检测电流输入端,另一端连接负极直流母线;所述低侧检测电流是指控制器的低侧检测电流输入端的电流。
10、本发明还提供一种低压多轴机器人短路检测装置,包括高侧电流采样单元、低侧电流采样单元、控制器和母线通断开关;所述高侧电流采样单元检测正极直流母线的电流,并将正极直流母线的电流转化为第一电压输入至控制器;所述低侧电流采样单元检测负极直流母线的电流,并将负极直流母线的电流转化为第二电压输入至控制器;所述控制器比较第一电压和第二电压的差异判断短路是否发生;若发生短路,所述控制器向母线通断开关发出断电控制信号;所述母线通断开关设置在正极直流母线上,收到断电控制信号即断开。
11、为了更好地理解和实施,下面结合附图详细说明本发明。
技术特征:
1.一种低压多轴机器人驱动装置,包括正极直流母线、负极直流母线、多个电机和电机驱动模块;所述电机通过电机驱动模块与正极直流母线和负极直流母线电连接;其特征在于:包括短路检测装置;所述短路检测装置检测正极直流母线和负极直流母线的电流,并根据正极直流母线和负极直流母线的电流判断短路是否发生,若判断短路发生,则切断正极直流母线使电机停机。
2.根据权利要求1所述的低压多轴机器人驱动装置,其特征在于:所述短路检测装置包括高侧电流采样单元、低侧电流采样单元、控制器和母线通断开关;所述高侧电流采样单元检测正极直流母线的电流,并将正极直流母线的电流转化为第一电压输入至控制器;所述低侧电流采样单元检测负极直流母线的电流,并将负极直流母线的电流转化为第二电压输入至控制器;所述控制器比较第一电压和第二电压的差异判断短路是否发生;若发生短路,所述控制器向母线通断开关发出断电控制信号;所述母线通断开关设置在正极直流母线上,收到断电控制信号即断开。
3.根据权利要求2所述的低压多轴机器人驱动装置,其特征在于:
4.根据权利要求3所述的低压多轴机器人驱动装置,其特征在于:
5.根据权利要求2-4中任一权利要求所述的低压多轴机器人驱动装置,其特征在于:还包括高侧电压跟随器和低侧电压跟随器;所述高侧电压跟随器将所述第一电压转化为高侧检测电流输入至控制器;所述低侧电压跟随器将所述第二电压转化为低侧检测电流输入至控制器;所述控制器比较所述高侧检测电流和低侧检测电流的差异判断短路是否发生。
6.根据权利要求5所述的低压多轴机器人驱动装置,其特征在于:
7.根据权利要求6所述的低压多轴机器人驱动装置,其特征在于:
8.一种低压多轴机器人短路检测装置,包括高侧电流采样单元、低侧电流采样单元、控制器和母线通断开关;所述高侧电流采样单元检测正极直流母线的电流,并将正极直流母线的电流转化为第一电压输入至控制器;所述低侧电流采样单元检测负极直流母线的电流,并将负极直流母线的电流转化为第二电压输入至控制器;所述控制器比较第一电压和第二电压的差异判断短路是否发生;若发生短路,所述控制器向母线通断开关发出断电控制信号;所述母线通断开关设置在正极直流母线上,收到断电控制信号即断开。
9.根据权利要求8所述低压多轴机器人短路检测装置,其特征在于:所述高侧电流采样单元包括高侧采样电阻、第一三极管、第二三极管、第一电阻、第二电阻和第三电阻;所述第一三极管和第二三极管均为pnp型三极管;所述第一三极管的发射极连接所述第一电阻后与所述高侧采样电阻远离电机的一端连接;所述第一三级管的集电极连接所述第二电阻后与所述负极直流母线连接;所述第一三级管的基极与所述第二三级管的基极连接;所述第二三极管的发射极连接所述高侧采样电阻靠近电机的一端,集电极连接所述第三电阻后与所述负极直流母线连接;所述第二三极管的基极与集电极连接;所述第一电压是指第一三级管集电极的电压。
10.根据权利要求9所述低压多轴机器人短路检测装置,其特征在于:所述低侧电流采样单元包括偏置电压提供单元、低侧采样电阻、第三三极管、第四三极管、第四电阻、第五电阻和第六电阻;所述偏置电压提供单元包括稳压管和偏置电阻;所述稳压管的阴极通过所述偏置电阻连接正极直流母线,阳极连接负极直流母线;所述低侧采样电阻串联在负极直流母线上;所述第三三极管和第四三极管均为npn型三极管;所述第三三极管的发射极连接所述第四电阻后与所述低侧采样电阻远离电机的一端连接;所述第三三级管的集电极连接所述第五电阻后与所述稳压管的阴极连接;所述第三三级管的基极与所述第四三级管的基极连接;所述第四三极管的发射极连接所述低侧采样电阻靠近电机的一端,集电极连接所述第六电阻后与所述稳压管的阴极连接;所述第四三极管的基极与集电极连接;所述第二电压是指第三三级管集电极的电压。
技术总结
本发明涉及一种低压多轴机器人驱动装置,包括正极直流母线、负极直流母线、多个电机和电机驱动模块以及短路检测装置;电机通过电机驱动模块与两根直流母线连接;短路检测装置包括高侧电流采样单元、低侧电流采样单元、控制器和母线通断开关;高侧电流采样单元检测正极直流母线的电流并将其转化为第一电压输入至控制器;低侧电流采样单元检测负极直流母线的电流并将其转化为第二电压输入至控制器;控制器比较第一电压和第二电压的差异判断短路是否发生;若发生短路,控制器向母线通断开关发出断电控制信号;母线通断开关设置在正极直流母线上,收到断电控制信号即断开。本发明的多轴机器人驱动装置能够低成本地实时检测短路情况。
技术研发人员:万小兵,李超,张启洲,石建军
受保护的技术使用者:深圳市华成工业控制股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!