一种用于光伏板清扫的可自动充电的清洁机器人的制作方法
本发明涉及光伏板清洁相关设备,尤其涉及一种用于光伏板清扫的可自动充电的清洁机器人。
背景技术:
1、太阳能光伏作为一种可再生清洁能源,已经成为当今能源变革中的重要力量。随着光伏板使用时间的积累,太阳能光伏板表面容易积累风沙、灰尘等污垢。不仅降低了光伏板的光电转换效率,最高可导致光伏板组件转化效率降低40%-60%,造成巨大的损失;而且容易形成“热岛效应”,导致光伏板局部发热而损坏。所以科学而专业的监测和清洁等维护作业成为了光伏产业发展的必然要求。
2、我国西北五省的光伏装机量达到85%,但这些地区恰好是风沙量大,干旱少水,交通不方便,化石燃料获取困难。同时地区地表土质松软,崎岖不平,光伏组件排排之间连接不起来,多为孤岛方式。
3、目前光伏电站清洗市场主要采用人工或者第三方团队进行清洗的模式,其清洗效率低,价格昂贵,耗水量高,极大的增加了光伏电站的运维成本。
4、市面上仅有的光伏板清洁机器人品种单一,功能单一。绝大部分的光伏板清洁机器人采用的动力为柴油机,人工驾驶,需要人工定期加注柴油才能满足使用,极少数也有换电的车,需要配备足够多的换电站,成本高、设备复杂,维护成本高。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明提出一种用于光伏板清扫的可自动充电的清洁机器人。
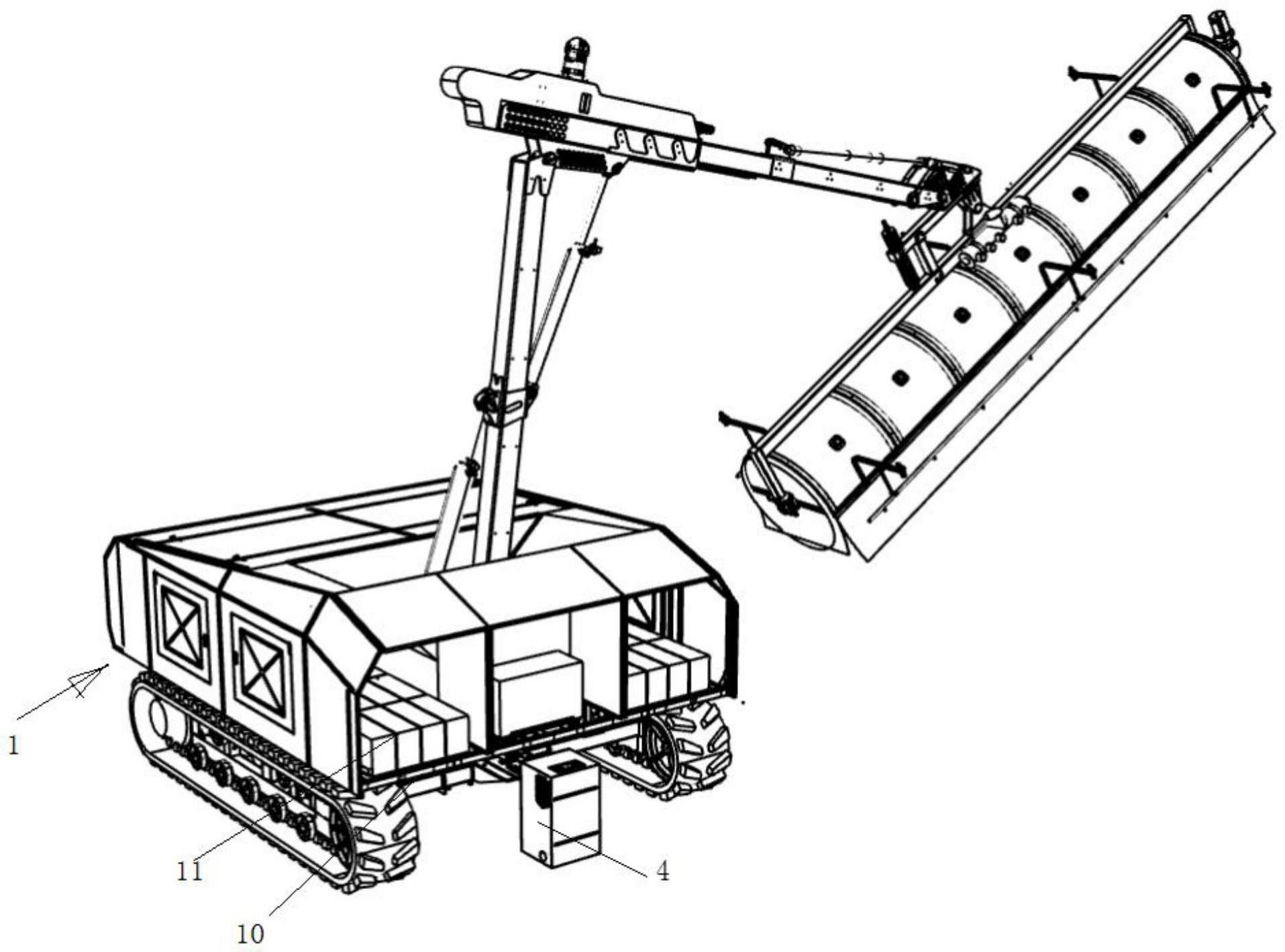
2、本发明提出的一种用于光伏板清扫的可自动充电的清洁机器人,包括履带式行走车身,所述履带式行走车身包括底盘,所述底盘上还设有清扫组件,底盘上还设有为所述履带式行走车身提供动力的动力电池,所述动力电池上连接有充电头,所述充电头上有向外凸起的导电触头,还包括焊装在所述底盘上的伸缩件,所述充电头安装在所述伸缩件的伸缩部,所述伸缩件用于带动所述充电头移动,完成充电后伸缩件带动充电头收缩回原位,完成充电流程。
3、和该清洁器人相适配的充电桩和现有的一样,包括外壳,所述外壳上具有插接部,所述插接部上具有插接孔,所述插接孔与上述的充电插头的导电触头接触。
4、履带式行走车身比普通轮胎具有很好的爬坡能力,接触面积大可以在沙漠,土质松软的路面上行驶;
5、设备总功率60kw,采用2组300ah和2组170ah的电池包。300ah的充电包配备150a的充电机,170ah的充电包配备80a的充电机。整个电池包配备一套完整的bms电池管理系;
6、通过充电头和伸缩件的设置,充电头与动力电池的充电线连接,在行走过程中充电头和伸缩件随该履带式车身一起移动,当动力电池需要充电时,该履带式行走车身移动至充电桩附近并使该充电头与充电桩的充电连接部相对,伸缩件伸长带动充电插头移动进而使充电插头与该充电桩练级,优选地,该充电桩比该履带式行走车身的底面低,且充电头位于该履带式行走车身两个履带的中部。
7、优选地,所述动力电池为磷酸铁锂电池,该动力电池包配备高效的bms管理系统。
8、优选地,还包括用于控制履带式行走车身行驶的无人驾驶系统。
9、优选地,所述履带式行走车身的四周均设有视觉传感器,通过视觉传感器进而便于获取该机器人在行走过程中的外部感知,进而便于无人驾驶系统精确的进行避障。
10、优选地,所述充电头和所述伸缩件均位于所述底盘下方。
11、优选地,还包括安装座,所述安装座安装在所述底盘上,所述伸缩件安装在所述安装座上,所述伸缩件的伸缩端设有绝缘件,所述充电头安装在所述绝缘件上。
12、优选地,所述安装座和所述绝缘件之间设有用于对绝缘件直线运动限位的限位组件。
13、优选地,所述安装座的外部设有防尘罩,所述防尘罩包括防尘外框和安装在所述防尘外框一端的遮挡部,所述防尘外框的另一端安装有密封板,所述遮挡部具有打开状态和封闭状态,当所述部处于封闭状态时,所述遮挡部、所述密封板和所述防尘外框之间形成防尘腔,所述伸缩件和所述充电头均位于所述防尘腔内,当所述遮挡部处于打开状态时,所述充电头具有位于所述防尘腔外的部分。
14、优选地,所述遮挡部包括多根弹性条,每根弹性条一端安装在所述防尘外框的上,所述弹性条的另一端处于悬空状态。
15、优选地,该遮挡部包括至少两层弹性遮挡,每层弹性遮挡均包括多根弹性条,且相邻的两层弹性遮挡的弹性条相互交错设置。
16、本发明中,所提出的用于光伏板清扫的可自动充电的清洁机器人,通过充电头和伸缩件的设置进而便于对该清扫机器人充电,进一步地该机器人为无人驾驶,进而便于该清洁机器人在无人偏远地区的大西北进行自动光伏板清洁;另外,该履带式行走车身的便于适应我国大西北比较严峻的工况。
17、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种用于光伏板清扫的可自动充电的清洁机器人,其特征在于,包括履带式行走车身(1),所述履带式行走车身(1)包括底盘(10),所述底盘(10)上还设有清扫组件,底盘(10)上还设有为所述履带式行走车身(1)提供动力的动力电池(11),所述动力电池(11)上连接有充电头(2),所述充电头(2)上有向外凸起的导电触头,还包括焊装在所述底盘(10)上的伸缩件(3),所述充电头(2)安装在所述伸缩件(3)的伸缩部,所述伸缩件(3)用于带动所述充电头(2)移动。
2.根据权利要求1所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,还包括安装座(7),所述安装座(7)安装在所述底盘(10)上,所述伸缩件(3)安装在所述安装座(7)上,所述伸缩件(3)的伸缩端设有绝缘件(6),所述充电头(2)安装在所述绝缘件(6)上。
3.根据权利要求2所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述安装座(7)和所述绝缘件(6)之间设有用于对绝缘件(6)直线运动限位的限位组件。
4.根据权利要求2所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述安装座(7)的外部设有防尘罩(9),所述防尘罩(9)包括防尘外框(90)和安装在所述防尘外框(90)一端的遮挡部(91),所述防尘外框(90)的另一端安装有密封板(92),所述遮挡部(91)具有打开状态和封闭状态,当所述部处于封闭状态时,所述遮挡部(91)、所述密封板(92)和所述防尘外框(90)之间形成防尘腔,所述伸缩件(3)和所述充电头(2)均位于所述防尘腔内,当所述遮挡部(91)处于打开状态时,所述充电头(2)具有位于所述防尘腔外的部分。
5.根据权利要求4所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述遮挡部(91)包括多根弹性条(910),每根弹性条(910)一端安装在所述防尘外框(90)的上,所述弹性条(910)的另一端处于悬空状态。
6.根据权利要求1所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述动力电池(11)为磷酸铁锂电池。
7.根据权利要求1所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,还包括用于控制履带式行走车身(1)行驶的无人驾驶系统。
8.根据权利要求3所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述履带式行走车身(1)的四周均设有视觉传感器(5)。
9.根据权利要求1所述的用于光伏板清扫的可自动充电的清洁机器人,其特征在于,所述充电头(2)和所述伸缩件(3)均位于所述底盘(10)下方。
技术总结
本发明公开了一种用于光伏板清扫的可自动充电的清洁机器人,包括履带式行走车身,所述履带式行走车身包括底盘,所述底盘上还设有清扫组件,底盘上还设有为所述履带式行走车身提供动力的动力电池,所述动力电池上连接有充电头,所述充电头上有向外凸起的导电触头,还包括焊装在所述底盘上的伸缩件,所述充电头安装在所述伸缩件的伸缩部,所述伸缩件用于带动所述充电头移动。本发明中,所提出的用于光伏板清扫的可自动充电的清洁机器人,通过充电头和伸缩件的设置进而便于对该清扫机器人充电,进一步地该机器人为无人驾驶,进而便于该清洁机器人在无人偏远地区的大西北进行自动光伏板清洁。
技术研发人员:邱明,方亚昆,任刚跃
受保护的技术使用者:尚特杰电力科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!