一种绝缘涂覆机器人的制作方法
本发明涉及导线涂覆,特别涉及一种绝缘涂覆机器人。
背景技术:
1、早期的架空电力线普遍采用裸线形式,容易引发意外断电等事故,因此有必要对该部分裸线电网进行绝缘改造,将架空裸线更换为绝缘导线。国内地势错综复杂,部分地区施工难度大甚至不具备施工条件,更换绝缘导线作业难以展开。随着技术的发展,开始采用绝缘涂覆机器人进行绝缘涂覆作业。
2、现有技术中,现有的绝缘涂覆机器人的推料装置往往是由液压杆或油压杆驱动,但是随着压力的变化,出料的速度就会发生变化,从而使涂覆不够均匀,容易形成安全隐患,并且现有的机器人往往在导线上运动时缺乏平衡性,此时运动的机器人如果失去平衡,可能会对导线造成损伤,因此需要一种绝缘涂覆机器人来解决上述的不足。
技术实现思路
1、本发明的目的在于提供一种绝缘涂覆机器人,以解决上述背景技术中提出的问题。
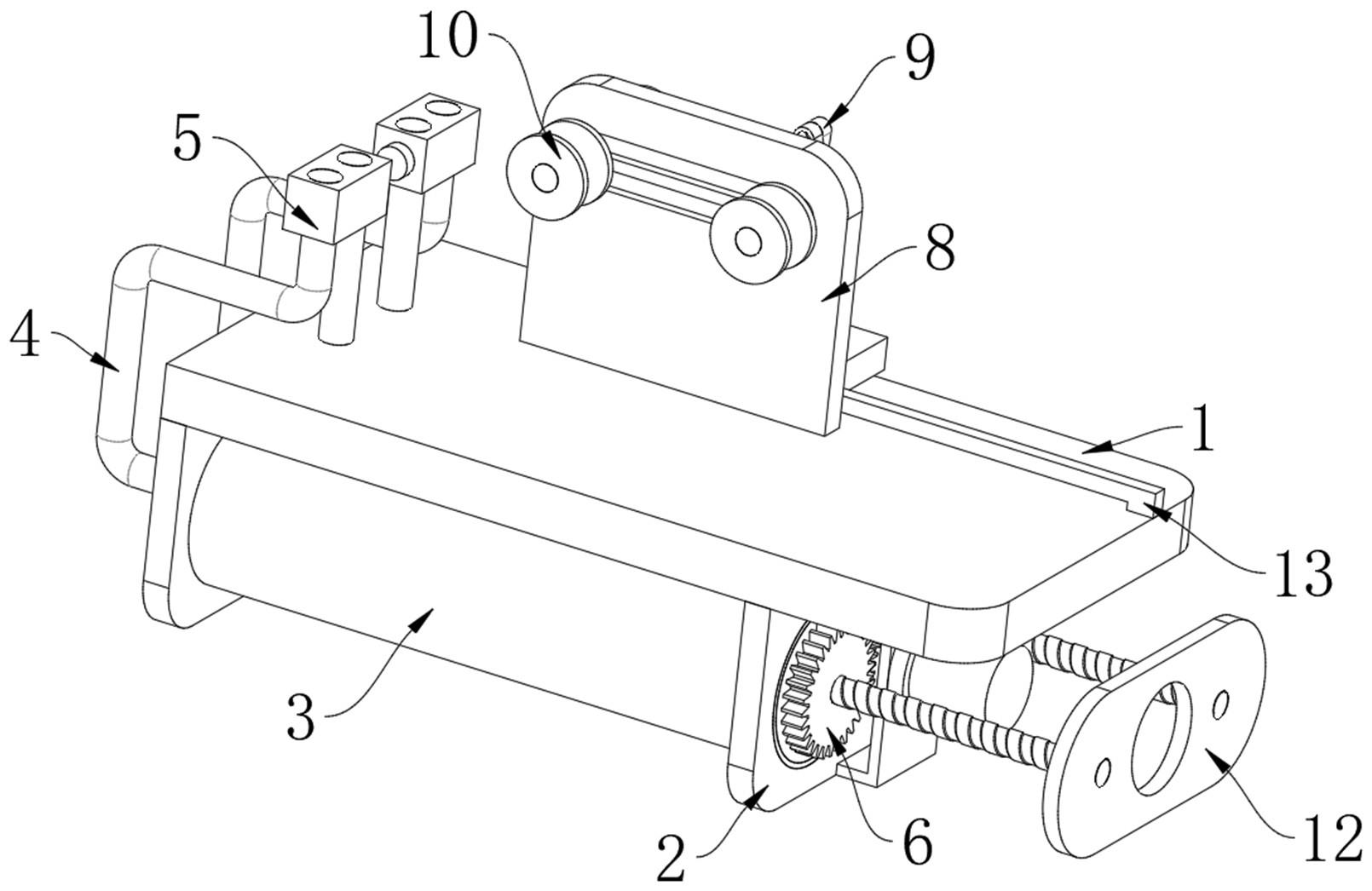
2、为实现上述目的,本发明提供如下技术方案:一种绝缘涂覆机器人,包括安装板,所述安装板的底端固定连接有一组支撑板,且支撑板的相对侧固定连接有一组对称的供料筒,所述供料筒的一端均固定连接有输料管,所述安装板的顶端固定连接有一组对称的喷头,且输料管的顶端分别与喷头固定连接,所述供料筒的另一端设置有推料机构,所述供料筒均与推料机构活动连接,所述供料筒的一端固定连接有一组对称的推料板,且推料板分别活动连接于供料筒的内部,所述安装板的顶端固定连接有固定板,所述固定板的一端设置有驱动机构,所述固定板的另一端通过转轴活动连接有一组对称的导向轮。
3、作为本发明的一种优选技术方案,所述推料机构包括伺服电机一、主动轮、从动轮和螺杆,所述伺服电机一的输出端与主动轮的中心处固定连接,所述主动轮和从动轮均通过转轴活动连接于支撑板的一端,所述从动轮呈对称设置,且主动轮位于从动轮的相对侧,所述从动轮均与主动轮相啮合,所述螺杆分别贯穿从动轮,且螺杆分别与从动轮螺纹连接。
4、进一步的,有利于利用主动轮带动从动轮转动。
5、作为本发明的一种优选技术方案,所述支撑板的一端固定连接有连接板,所述伺服电机一固定连接于连接板的外侧,所述主动轮位于连接板的内侧,且主动轮通过转轴与连接板活动连接。
6、进一步的,有利于利用伺服电机一带动主动轮运动。
7、作为本发明的一种优选技术方案,所述螺杆分别贯穿供料筒,且螺杆分别与供料筒螺纹连接,所述螺杆的一端固定连接有限位板,所述螺杆的另一端分别与推料板固定连接。
8、进一步的,有利于利用螺杆带动推料板移动。
9、作为本发明的一种优选技术方案,所述驱动机构包括伺服电机二、连杆、摇杆和平衡块,所述伺服电机二固定连接于固定板的一端,且伺服电机二的输出端与导向轮的中心处固定连接,所述连杆通过转轴与导向轮固定连接,所述摇杆的顶端与连杆的一端活动连接,所述摇杆的底端与平衡块的顶端固定连接。
10、进一步的,有利于利用伺服电机带动导向轮转动。
11、作为本发明的一种优选技术方案,所述安装板的顶端固定连接有导轨,所述平衡块活动连接于安装板的顶端,所述导轨贯穿平衡块,且导轨与平衡块与导轨活动连接。
12、进一步的,有利于平衡块沿着导轨移动。
13、作为本发明的一种优选技术方案,所述导向轮的外侧均套设有传送带,且导向轮和传送带组成皮带传动结构。
14、进一步的,有利于利用传送带带动导向轮同步旋转。
15、与现有技术相比,本发明的有益效果是:
16、1、本发明通过设置的推料机构,打开伺服电机一,带动主动轮旋转,由于从动轮均与主动轮相啮合,带动从动轮反向同步旋转,由于从动轮分别与螺杆螺纹连接,且限位板限制了螺杆的旋转,从而带动螺杆进行平移,进而带动推料板沿着供料筒的内部移动,以实现均匀供料的作用,防止涂覆不均匀造成安全隐患。
17、2、本发明通过设置的驱动机构,打开伺服电机二,由于导向轮和传送带组成皮带传动结构,带动导向轮均发生同步转动,同时带动连杆二转动,带动摇杆转动,从而带动平衡块沿着导轨做往复运动,从而维持机器人在涂覆过程中的平衡,防止运动时失去平衡对导线造成损伤。
技术特征:
1.一种绝缘涂覆机器人,包括安装板(1),其特征在于:所述安装板(1)的底端固定连接有一组支撑板(2),且支撑板(2)的相对侧固定连接有一组对称的供料筒(3),所述供料筒(3)的一端均固定连接有输料管(4),所述安装板(1)的顶端固定连接有一组对称的喷头(5),且输料管(4)的顶端分别与喷头(5)固定连接,所述供料筒(3)的另一端设置有推料机构(6),所述供料筒(3)均与推料机构(6)活动连接,所述供料筒(3)的一端固定连接有一组对称的推料板(7),且推料板(7)分别活动连接于供料筒(3)的内部,所述安装板(1)的顶端固定连接有固定板(8),所述固定板(8)的一端设置有驱动机构(9),所述固定板(8)的另一端通过转轴活动连接有一组对称的导向轮(10)。
2.根据权利要求1所述的一种绝缘涂覆机器人,其特征在于:所述推料机构(6)包括伺服电机一(601)、主动轮(602)、从动轮(603)和螺杆(604),所述伺服电机一(601)的输出端与主动轮(602)的中心处固定连接,所述主动轮(602)和从动轮(603)均通过转轴活动连接于支撑板(2)的一端,所述从动轮(603)呈对称设置,且主动轮(602)位于从动轮(603)的相对侧,所述从动轮(603)均与主动轮(602)相啮合,所述螺杆(604)分别贯穿从动轮(603),且螺杆(604)分别与从动轮(603)螺纹连接。
3.根据权利要求2所述的一种绝缘涂覆机器人,其特征在于:所述支撑板(2)的一端固定连接有连接板(11),所述伺服电机一(601)固定连接于连接板(11)的外侧,所述主动轮(602)位于连接板(11)的内侧,且主动轮(602)通过转轴与连接板(11)活动连接。
4.根据权利要求3所述的一种绝缘涂覆机器人,其特征在于:所述螺杆(604)分别贯穿供料筒(3),且螺杆(604)分别与供料筒(3)螺纹连接,所述螺杆(604)的一端固定连接有限位板(12),所述螺杆(604)的另一端分别与推料板(7)固定连接。
5.根据权利要求1所述的一种绝缘涂覆机器人,其特征在于:所述驱动机构(9)包括伺服电机二(901)、连杆(902)、摇杆(903)和平衡块(904),所述伺服电机二(901)固定连接于固定板(8)的一端,且伺服电机二(901)的输出端与导向轮(10)的中心处固定连接,所述连杆(902)通过转轴与导向轮(10)固定连接,所述摇杆(903)的顶端与连杆(902)的一端活动连接,所述摇杆(903)的底端与平衡块(904)的顶端固定连接。
6.根据权利要求5所述的一种绝缘涂覆机器人,其特征在于:所述安装板(1)的顶端固定连接有导轨(13),所述平衡块(904)活动连接于安装板(1)的顶端,所述导轨(13)贯穿平衡块(904),且导轨(13)与平衡块(904)与导轨(13)活动连接。
7.根据权利要求6所述的一种绝缘涂覆机器人,其特征在于:所述导向轮(10)的外侧均套设有传送带(14),且导向轮(10)和传送带(14)组成皮带传动结构。
技术总结
本发明公开了一种绝缘涂覆机器人,包括安装板,所述安装板的底端固定连接有一组支撑板,且支撑板的相对侧固定连接有一组对称的供料筒,所述供料筒的一端均固定连接有输料管,所述安装板的顶端固定连接有一组对称的喷头,且输料管的顶端分别与喷头固定连接,所述供料筒的另一端设置有推料机构,所述供料筒均与推料机构活动连接,所述供料筒的一端固定连接有一组对称的推料板,且推料板分别活动连接于供料筒的内部。发明一种绝缘涂覆机器人,使用者首先将导向轮挂到待涂导线上,接着通过设置的推料机构带动推料板在推料板的内部运动,从而推动涂料均匀从输料管进入喷头,进而实现均匀涂覆的功能,防止涂覆不均匀造成安全隐患。
技术研发人员:吴优,王成智,张攀,蒋晶晶,李芳亚,杨帆,张尖兵,罗致
受保护的技术使用者:国网湖北省电力有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!