电机控制模式的切换方法和电机与流程
本公开的实施例涉及电机控制,具体地,涉及电机控制模式的切换方法和电机。
背景技术:
1、通常使用矢量控制方法来控制电机(例如,三相电机),以获得高效率。而矢量控制往往需要知道电机转子位置角以便进行坐标变换。为了降低成本和避免传感器发生故障,通常采用无传感器矢量控制算法。对于一些应用场合,电机主要运行在中高速阶段。在这种应用场合下,通常使用基于电机基波模型的无传感器矢量控制算法,如磁链观测器、反电动势观测器或者模型参考自适应观测器等算法。而这些算法在零速和低速时效果不佳。因此在电机的启动和低速阶段往往采用i-f单电流闭环控制。当电机运行到一定转速后切换到无传感器矢量控制算法。为了让电机从i-f单电流闭环运行状态平滑切换到中高速无传感器转速电流双闭环运行状态,需要保证切换瞬间电机转子的角度不能变化太大。
技术实现思路
1、本文中描述的实施例提供了一种电机控制模式的切换方法和电机。
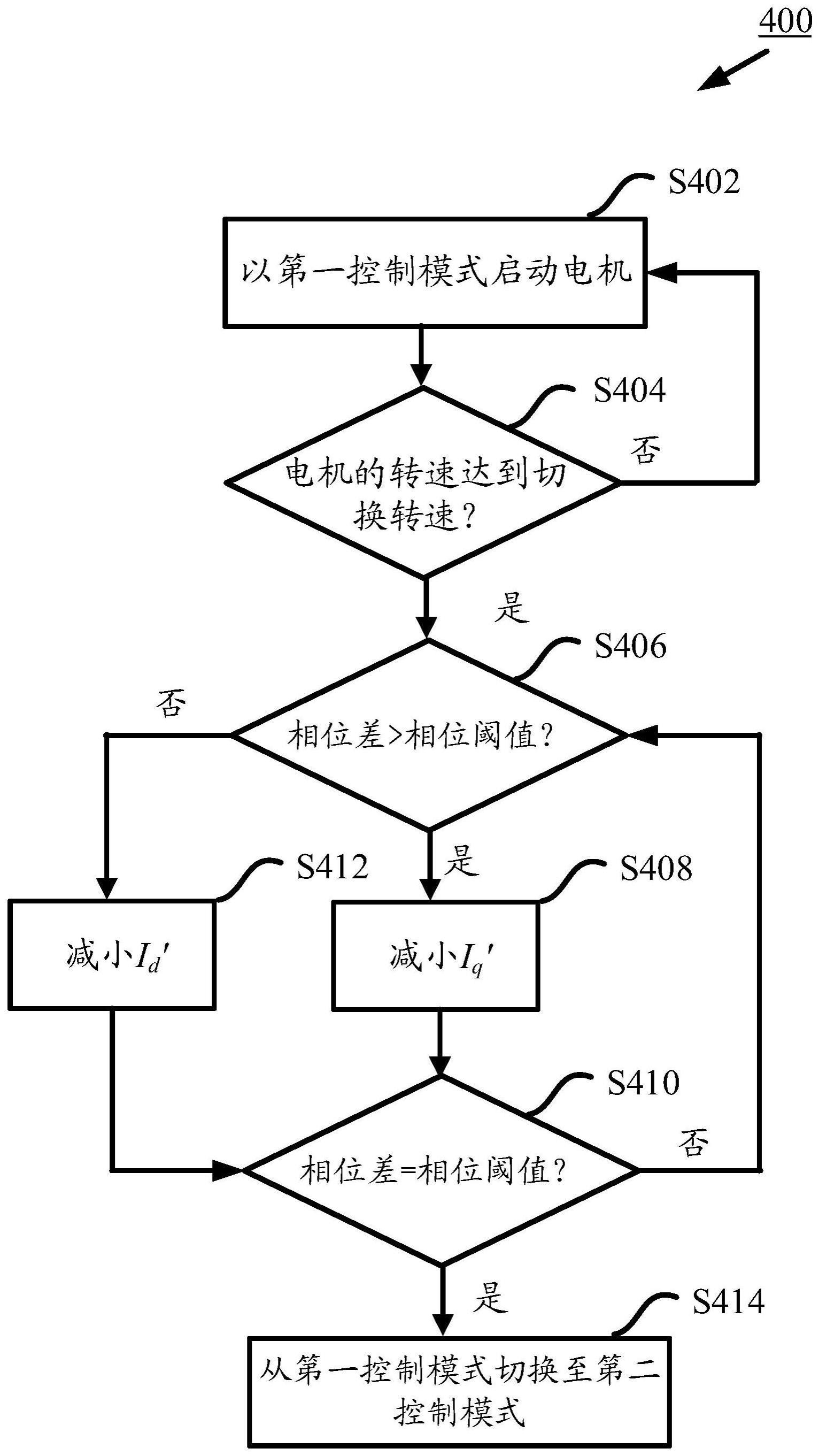
2、根据本公开的第一方面,提供了一种电机控制模式的切换方法。该切换方法包括:以第一控制模式启动电机;确定电机的转速是否达到切换转速;响应于电机的转速达到切换转速,确定虚拟坐标系与观测器坐标系的相位差,虚拟坐标系是第一控制模式所使用的坐标系;响应于相位差小于相位阈值,减小虚拟坐标系的d轴电流;以及响应于相位差等于相位阈值,从第一控制模式切换至第二控制模式。
3、在本公开的一些实施例中,切换方法还包括:响应于相位差大于相位阈值,减小虚拟坐标系的q轴电流。
4、在本公开的一些实施例中,虚拟坐标系的d轴电流的初始值大于第一初始阈值。虚拟坐标系的q轴电流的初始值大于第二初始阈值。
5、在本公开的一些实施例中,第二初始阈值为:
6、
7、其中,iq'表示第二初始阈值,tl表示负载转矩,b表示阻尼系数,j表示转动惯量,ωc表示切换时的机械角速度,t表示时间,np表示极对数,ψf表示永磁体磁链。
8、在本公开的一些实施例中,第一初始阈值为零。
9、在本公开的一些实施例中,虚拟坐标系的d轴电流的初始值等于虚拟坐标系的q轴电流的初始值。
10、在本公开的一些实施例中,第一控制模式采用i-f单电流闭环控制。
11、在本公开的一些实施例中,第二控制模式采用无传感器转速电流双闭环控制。
12、在本公开的一些实施例中,相位阈值为零。
13、在本公开的一些实施例中,通过以下方式中的一个或多个来减小虚拟坐标系的d轴电流和q轴电流:线性减小电流;依据虚拟坐标系与观测器坐标系的相位差来确定电流减小的幅值;以及通过pi控制器来减小电流,其中,以虚拟坐标系与观测器坐标系的相位差为误差输入项,且输出项为电流值来构造该pi控制器。
14、根据本公开的第二方面,提供了一种电机。该电机被配置为执行根据本公开的第一方面所述的切换方法的步骤。
技术特征:
1.一种电机控制模式的切换方法,包括:
2.根据权利要求1所述的切换方法,还包括:响应于所述相位差大于所述相位阈值,减小所述虚拟坐标系的q轴电流。
3.根据权利要求1或2所述的切换方法,其中,所述虚拟坐标系的d轴电流的初始值大于第一初始阈值,所述虚拟坐标系的q轴电流的初始值大于第二初始阈值。
4.根据权利要求3所述的切换方法,其中,所述第二初始阈值为:
5.根据权利要求3所述的切换方法,其中,所述第一初始阈值为零。
6.根据权利要求1所述的切换方法,其中,所述虚拟坐标系的d轴电流的初始值等于所述虚拟坐标系的q轴电流的初始值。
7.根据权利要求1至2和4至6中任一项所述的切换方法,其中,所述第一控制模式采用i-f单电流闭环控制。
8.根据权利要求7所述的切换方法,其中,所述第二控制模式采用无传感器转速电流双闭环控制。
9.根据权利要求1至2和4至6中任一项所述的切换方法,其中,所述相位阈值为零。
10.一种电机,被配置为执行根据权利要求1至9中任一项所述的切换方法的步骤。
技术总结
本公开的实施例提供一种电机控制模式的切换方法和电机。该切换方法包括:以第一控制模式启动电机;确定电机的转速是否达到切换转速;响应于电机的转速达到切换转速,确定虚拟坐标系与观测器坐标系的相位差,虚拟坐标系是第一控制模式所使用的坐标系;响应于相位差小于相位阈值,减小虚拟坐标系的d轴电流;以及响应于相位差等于相位阈值,从第一控制模式切换至第二控制模式。
技术研发人员:张鹏飞,林东轩
受保护的技术使用者:圣邦微电子(北京)股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!