一种用于电缆沟道的爬行装置的制作方法
本发明涉及机械,特别是涉及一种用于电缆沟道的爬行装置。
背景技术:
1、电缆沟道内环境地形复杂,电缆线敷设多,施工凌乱,有些电缆沟还有被倒进垃圾杂物等,沟道底部有积水坑、淤泥等现象,目前电缆沟道多采用履带式爬行方式。在复杂恶劣的环境下,履带式的爬行装置容易被当住,有些障碍是它无法穿越的。履带式沟道爬行装置受环境地形限制,使用机会受限,不能很好的执行沟道巡查任务;基于轮式负压吸附机构的煤矿巷道爬行装置适用于煤矿井道,两侧壁,对于电缆沟两侧壁被安装了电缆支架和电缆后基本无法使用;侧壁式爬行负压车相比沟道天花板上爬行,需要提供更的能量,这样少设备的连续工作时间,爬行同样的距离能耗比在天花板上爬行高出50%
技术实现思路
1、本发明的目的在于,提出一种用于电缆沟道的爬行装置,解决上述的技术问题。
2、一方面,提供一种用于电缆沟道的爬行装置,包括:
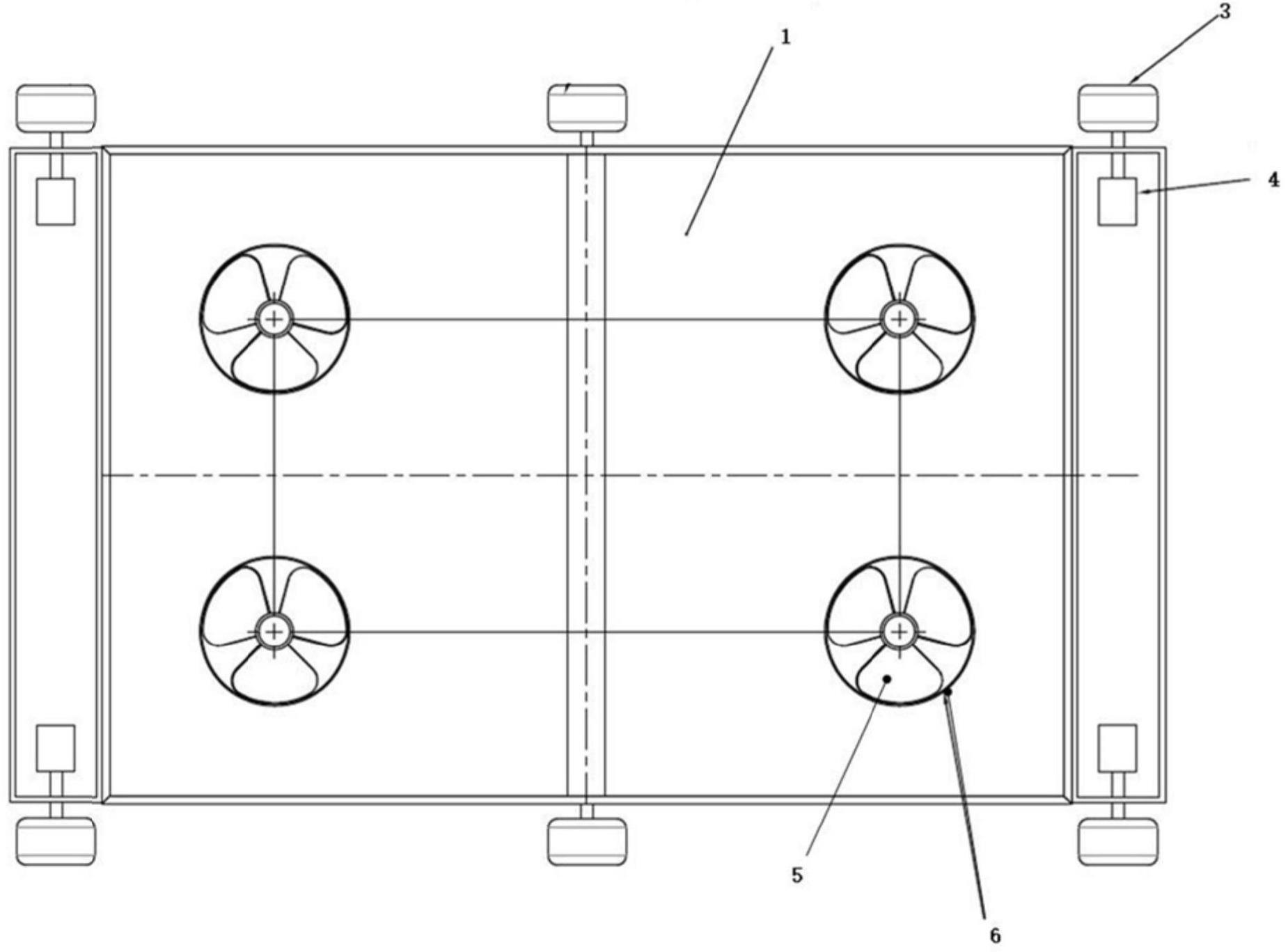
3、基体、气囊、车轮、驱动电机、轴流风机及控制板;
4、所述基体包括上下相邻设置的负压腔和气囊腔,所述气囊腔的下部分套装一气囊,所述气囊腔的腔体将该气囊固定其内;所述负压腔的下部设有多个排气管,每个所述排气管内装有一个所述轴流风机;
5、所述负压腔两层分别设置多个车轮,所述车轮被所述基体内设置的驱动电机驱动,用以实现所述爬行装置的前进或后腿;
6、所述轴流风机将吸入的气体通过所述排气管向下排放,产生一个反向推力,反向推力作用在所述气囊上,用以增加向上的托举力;
7、所述控制板设置于所述基体内,所述控制板分别与所述轴流风机和所述驱动电机电性连接;
8、所述控制板还用以采集所述负压腔内的实时气压值,并根据实时气压值确定所述轴流风机的转速值,通过该转速值调节所述负压腔内气压大小;
9、在该爬行装置在行进时,所述控制板控制所述气囊调整所述负压腔内产生的负压大小,使其与该爬行装置的重力大小相等,用以减小装置与天花顶的摩擦力;
10、当该爬行装置静止状态时,所述控制板控制加大所述轴流风机的转速,使所述负压腔内产生的负压大小大于该爬行装置的重力,用以使该爬行装置稳定贴在沟道的天花顶上不会掉落。
11、优选地,图像采集装置、通信模块及远端控制器;
12、所述图像采集装置和所述通信模块分别与所述控制板电性连接,并通过无线网络将所述控制板与所述远端控制器进行通信连接;
13、所述图像采集装置用以采集该爬行装置周边的实时图像信息,并将该实时图像信息通过所述控制板进行压缩处理后发送给所述远端控制器。
14、优选地,所述基体的上部分腔体为负压腔,所述负压腔的四周设置橡胶件片,所述橡胶件贴合于天花顶与集体之间。
15、优选地,当所述轴流风机转动时,所述负压腔将其内的空气排出,将其内部设置为接近真空的状态,并形成该爬行装置内部与外部气压差。
16、优选地,所述内部与外部气压差满足以下条件:
17、fa=p*s
18、fa>mg
19、其中,p为爬行装置内部与外部气压差,s为负压腔的面积,fa为气压差产生的压力,mg为爬行装置的自身重力。
20、优选地,所述气囊的中间内设置空芯并预留一个充气口;所述气囊外表面上设置多个贴合部,所述贴合部可将相邻的多个气囊相互固定于一起;
21、当所述气囊内充气后的所述气囊套入所述基体的所述气囊腔内。
22、优选地,所述车轮至少包括四个驱动轮及多个可拆卸的从动轮,每个驱动轮内对应设置至少一个所述驱动电机;所述驱动电机可控制其连接的驱动轮进行前进、后退及转弯。
23、优选地,所述驱动轮内设置多个磁吸部,所述磁吸部均匀的分布于所述驱动轮的内壁;当所述驱动轮贴合于电缆沟道的天花顶时,产生磁吸力用以增加该爬行装置的稳定性。
24、优选地,所述远端控制器用以显示接收的实时图像信息,根据所述实时图像信息接收输入的控制指令,并将接收的控制指令发送给所述控制板,通过控制板对所述气囊或所述驱动电机的控制实现对应的控制动作。
25、综上,实施本发明的实施例,具有如下的有益效果:
26、本发明提供的用于电缆沟道的爬行装置,突破了沟道内爬行装置只能再沟道底面行进的选择,选在在沟道的顶部天花板倒立式爬行。技术上采用了吸气造负压的方式,将移动装置给按在天花板上。同时装置的底部空间采用密度比空气小的气垫块,通过浮力方式将爬行装置向上托举。轮子采用磁铁方式,沟道的天花板多为钢筋混凝土结构,磁性轮子与铁料之间产生磁力,将爬行装置提拉。
技术特征:
1.一种用于电缆沟道的爬行装置,其特征在于,包括:
2.如权利要求1所述的爬行装置,其特征在于,还包括:
3.如权利要求2所述的爬行装置,其特征在于,所述基体的上部分腔体为负压腔,所述负压腔的四周设置橡胶件片,所述橡胶件贴合于天花顶与集体之间。
4.如权利要求3所述的爬行装置,其特征在于,当所述轴流风机转动时,所述负压腔将其内的空气排出,将其内部设置为接近真空的状态,并形成该爬行装置内部与外部气压差。
5.如权利要求4所述的爬行装置,其特征在于,所述内部与外部气压差满足以下条件:
6.如权利要求5所述的爬行装置,其特征在于,所述气囊的中间内设置空芯并预留一个充气口;所述气囊外表面上设置多个贴合部,所述贴合部可将相邻的多个气囊相互固定于一起;
7.如权利要求6所述的爬行装置,其特征在于,所述车轮至少包括四个驱动轮及多个可拆卸的从动轮,每个驱动轮内对应设置至少一个所述驱动电机;所述驱动电机可控制其连接的驱动轮进行前进、后退及转弯。
8.如权利要求7所述的爬行装置,其特征在于,所述驱动轮内设置多个磁吸部,所述磁吸部均匀的分布于所述驱动轮的内壁;当所述驱动轮贴合于电缆沟道的天花顶时,产生磁吸力用以增加该爬行装置的稳定性。
9.如权利要求2所述的爬行装置,其特征在于,所述远端控制器用以显示接收的实时图像信息,根据所述实时图像信息接收输入的控制指令,并将接收的控制指令发送给所述控制板,通过控制板对所述气囊或所述驱动电机的控制实现对应的控制动作。
技术总结
本发明提供一种用于电缆沟道的爬行装置,包括,基体、气囊、车轮、驱动电机、轴流风机及控制板;所述基体包括上下相邻设置的负压腔和气囊腔,所述气囊腔的下部分套装一气囊,所述气囊腔的腔体将该气囊固定其内;所述负压腔的下部设有多个排气管,每个所述排气管内装有一个所述轴流风机;所述负压腔两层分别设置多个车轮,所述车轮被所述基体内设置的驱动电机驱动;所述轴流风机将吸入的气体通过所述排气管向下排放,产生一个反向推力,反向推力作用在所述气囊上,用以增加向上的托举力。本发明采用了吸气造负压的方式,将移动装置给按在天花板上,同时装置的底部空间采用密度比空气小的气垫块,通过浮力方式将爬行装置向上托举。
技术研发人员:赵法强,戴昊,常洪亮
受保护的技术使用者:深圳供电局有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!