一种永磁同步电机无差拍预测电流控制误差补偿方法与流程
本发明属于电机控制,具体涉及一种永磁同步电机无差拍预测电流控制误差补偿方法。
背景技术:
1、在电力电子技术的不断发展下,永磁同步电机具有结构紧凑、转矩电流比和效率以及功率密度高、容错性良好等特点,广泛应用于机器人、电动汽车、航空航天等领域。电流环作为电流、速度、位置三环级联控制系统的最内环,其作用至关重要,所以目前有许多研究来优化电流控制,如采用比例-积分(proportional–integral,pi)控制、滑模控制(sliding mode control,smc)、预测控制等方法控制电流。
2、pi控制由于结构简单、运算简单和易于实现等优点,得到了广泛应用。但实际中永磁同步电机控制系统是非线性的,而此方法是线性控制算法,因此不能保证同时兼顾响应速度和精度。smc对参数变化和干扰的敏感性低,鲁棒性强。但不连续的控制或未建模的动态常常会引起抖振,降低了控制性能。
3、随着离散数字控制技术的发展以及芯片处理能力的不断优化,预测控制因具有结构简单、更好的动态性能而备受关注,得到广泛研究。预测控制可分为无差拍预测控制(deadbeat predictive control,dpc)、滞后预测控制、轨迹预测控制和模型预测控制(model predictive control,mpc)。在电流控制方面,无差拍预测电流控制(deadbeatpredictive current control,dpcc)具有动态性能好、控制精度高等优点,可以结合空间矢量脉宽调制(space vector pulse width modulation,svpwm)输入到逆变器,开关频率固定,相对于其他电流预测控制方法计算简便,因此得到广泛应用。但dpcc具有对参数敏感的缺点,其控制性能和预测模型中电机参数有关。由于温度、磁饱和和交叉耦合等因素的影响,导致电机参数失配,进而导致dpcc产生稳态误差,不利于控制的性能。
4、为解决上述dpcc的问题,目前已有的优化方法有无模型控制法、参数辨识、扰动观测器补偿等等。y.xu,s.li and j.zou在文献integral sliding mode control baseddeadbeat predictive current control for pmsm drives with disturbancerejection中提出了一种新的方法,将电流误差通过积分滑模项引入到控制信号中进行误差补偿,既能增加鲁棒性又可保证控制性能。但在引入积分项的方法当中,当误差较大时不可避免产生积分饱和现象,从而影响系统控制。
技术实现思路
1、有鉴于此,本发明的目的提供一种永磁同步电机无差拍预测电流控制误差补偿方法,解决上述现有技术问题中的一个或者多个。
2、为实现上述目的,本发明提供一种永磁同步电机无差拍预测电流控制误差补偿方法,应用于表贴式永磁同步电机,其特征在于,包括以下步骤:
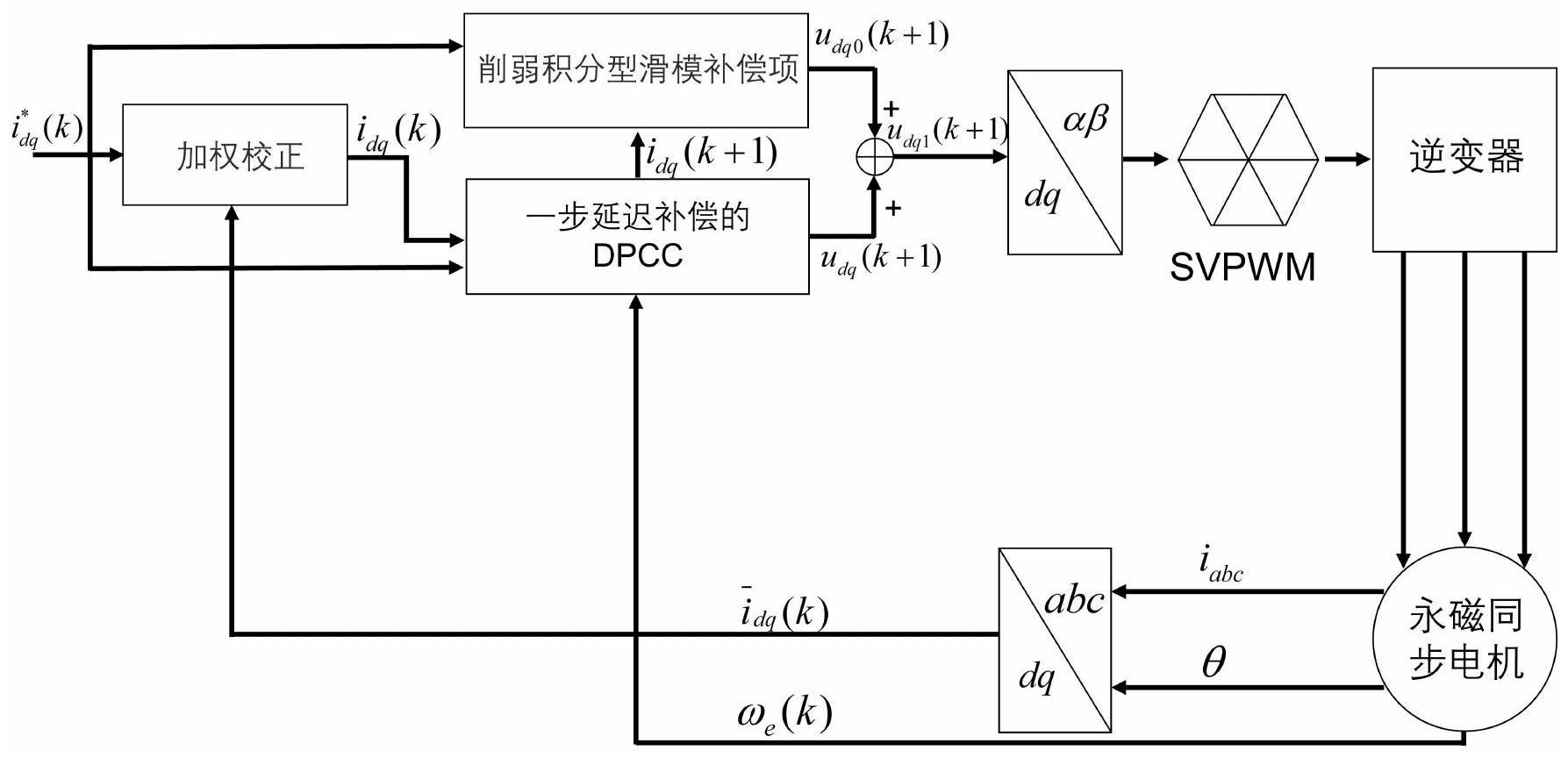
3、s1、输入d轴修正前的反馈电流q轴修正前的反馈电流d轴给定电流id*(k)以及q轴给定电流iq*(k),通过式ⅰ得到d轴修正后的反馈电流和q轴修正后的反馈电流;
4、
5、其中,x+y=1,0<x<1,0<y<1;
6、s2、输入电角速度ωe(k),表贴式永磁同步电机d轴和q轴电感相等,令ld=lq=ls,其中,ld表示d轴电感,lq表示q轴电感,分别通过式ⅱ和式ⅲ得到一步延时补偿后的k+1时刻d轴的预测电流id(k+1)、k+1时刻q轴的预测电流iq(k+1)、k+1时刻d轴的预测电压ud(k+1)、k+1时刻q轴的预测电压uq(k+1);
7、
8、
9、其中,ud(k)表示k时刻d轴的预测电压,uq(k)表示k时刻q轴的预测电压;
10、其中,
11、
12、其中,rs表示永磁同步电机的定子电阻,ψf代表永磁体磁链,ts为电流环控制周期;
13、s3、通过式ⅳ得到削弱积分型滑模补偿的电压;
14、
15、其中,l0表示预测模型中的dq轴电感,α、m、ε为可调系数,sd、sq分别为d轴和q轴的滑模面;
16、其中,
17、所述滑模面如下:
18、
19、其中,饱和函数μ>0表示边界层厚度,λ≥-1为积分削弱程度调节因子;
20、s4、根据式ⅴ,得到d轴和q轴的输出电压ud1(k+1)和uq1(k+1),输出电压通过反park变换及空间矢量脉宽调制(svpwm)生成pwm波信号作用于逆变器,进而驱动永磁同步电机;
21、
22、在一些实施方式中,所述的计算公式如下:
23、若|s|≤μ,
24、若s>μ,
25、若s<-μ,
26、在一些实施方式中,所述d轴修正前的反馈电流和q轴修正前的反馈电流是通过永磁同步电机反馈的a、b、c三相电流以及位置传感器测量的角度值θ通过clark变换和park变换转换得到。
27、在一些实施方式中,所述可调系数满足以下条件:m>0。
28、有益效果:
29、本发明首先针对传统dpcc因参数失配产生稳态误差的问题,以及加入积分项补偿误差但因误差较大时产生积分饱和的问题提出了削弱积分型的滑模补偿方法,此方法引入边界层的概念,层内是正常积分,层外则对积分进行削弱,达到补偿稳态误差和抗积分饱和的作用。
30、其次,针对因电感失配过大而产生的电流波动问题,引入权重因子进行优化,提高了鲁棒性。
31、最后,针对实际控制系统中的时延问题,采用一步延迟补偿算法优化,减小延时。
技术特征:
1.一种永磁同步电机无差拍预测电流控制误差补偿方法,应用于表贴式永磁同步电机,其特征在于,包括以下步骤:
2.如权利要求1所述的方法,其特征在于,所述的计算公式如下:
3.如权利要求1所述的方法,其特征在于,所述d轴修正前的反馈电流和q轴修正前的反馈电流是通过永磁同步电机反馈的a、b、c三相电流以及位置传感器测量的角度值θ通过clark变换和park变换转换得到。
4.如权利要求1所述的方法,其特征在于,所述可调系数满足以下条件:m>0。
技术总结
本发明根据传统无差拍预测电流控制(DPCC)因参数失配产生稳态误差的问题,以及加入积分项补偿误差但因误差较大时产生积分饱和的问题提出了削弱积分型的滑模补偿方法,此方法引入边界层的概念,层内是正常积分,层外则对积分进行削弱达到抗积分饱和的作用。其次,针对因电感失配过大而产生的电流波动问题,引入权重因子进行优化。最后,针对实际控制系统中的时延问题,采用一步延迟补偿算法优化。实验结果表明,该方法在电机参数失配时有效的消除了稳态误差,改善了积分饱和问题,增强了鲁棒性。
技术研发人员:张永康,孙德新,季诚胜,尤钱亮
受保护的技术使用者:南通智能感知研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!