一种下垂控制并联逆变器自适应虚拟阻抗调节方法
本发明属于逆变器控制,具体涉及一种下垂控制并联逆变器自适应虚拟阻抗调节方法。
背景技术:
1、下垂控制并联逆变器可以在无需通信的情况下自动实现各台逆变器的有功和无功功率均分。然而,与有功功率不同,由于线路阻抗不匹配,无功功率的均分精度往往不能满足要求。在极端情况下,无功功率不均分可能会导致逆变器之间产生过大的环流,这对孤岛微电网中逆变器的并联运行构成了巨大挑战。
2、针对孤岛微电网中无功功率均分问题,外学者提出了多种改进策略,主要有以下两类方法:基于改进下垂控制的方法和基于虚拟阻抗的方法。提出了对公共耦合点(pcc)电压的间接下垂控制,但在大多数情况下是无法获取线路阻抗信息的。这个问题可以通过基于在线估计线路阻抗的自适应下垂控制方法来解决。然而,功率均分的精度仍很大程度上依赖于对pcc点电压的测量,并没有解决无功功率不均分问题的根源。为了减少对通信环节的依赖,通过对每台逆变器注入同步的交流小信号来实现等效通信。然而,交流小信号的注入和提取使得该系统的实现变得更为复杂。上述改进下垂控制方法的共同点是,每台逆变器的本地控制器根据测量的输出无功功率实时调整其电压参考,达到反馈控制的效果。一方面,在功率测量过程中,低通滤波器的相位延迟会使系统动态性能恶化;另一方面,通过不间断的通信获得远程功率信息来调整输出电压,降低了整个系统的可靠性。
3、基于虚拟阻抗的方法通过直接补偿不匹配的线路阻抗,可以从根本上改善动态性能并提高可靠性。这种方法通过将虚拟电压降前馈到输出电压参考上,实现精确的无功功率均分。通常,虚拟阻抗方法面临的主要问题是难以准确测量线路阻抗,因而无法精确补偿。也有提出了一种自适应虚拟阻抗方法,基于一致性的方法相结合,以保证指定的无功功率分配。在这些方法中,各发电单元调整虚拟阻抗向共同的无功功率目标移动;然而,这需要通信网络从微电网中央控制器(mgcc)获得信息。
4、为了实现无功功率的均分,需要采用改进下垂控制的方法或基于虚拟阻抗的方法。但现有的方法有以下局限性:(1)需要远程采集功率或pcc电压信息并通过不间断的通信传输,这影响了系统的可靠性和总体设计成本;(2)线路阻抗实时变化,且难以准确测量,因此无法通过调节虚拟阻抗值实现精确补偿;(3)为了实现多机之间的协调控制,需要通信网络从微电网中央处理器获得其他装置的无功功率信息,这会降低系统的可靠性。
技术实现思路
1、针对现有技术存在的技术问题,本发明提出了一种下垂控制并联逆变器自适应虚拟阻抗调节方法,用以实现无功功率的精确均分。
2、为实现上述目的,本发明提供了如下的技术方案:
3、本发明提供了一种下垂控制并联逆变器自适应虚拟阻抗调节方法,包括:
4、各台并联逆变器通过接收同步触发信号指令,在同一时刻以相同的调节步长增大各自虚拟阻抗值;再根据无功功率变化趋势判断虚拟阻抗的调节方向,根据调节方向调整虚拟阻抗值,使得最终各台逆变器的无功功率分配会随着总阻抗的逼近而趋于相等。
5、作为本发明进一步改进,所述逆变器为采用下垂控制的三相并联逆变器;
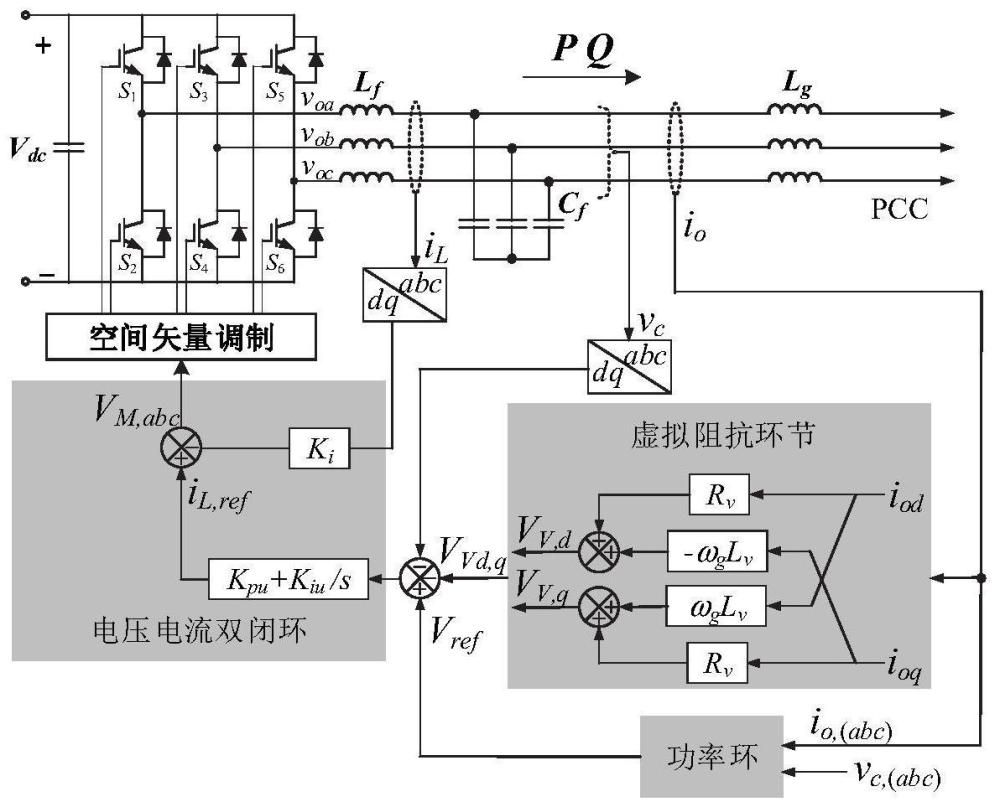
6、逆变器直流侧连接恒定直流电压源vdc,三相逆变器经调制信号驱动后,输出端口电压voa、vob和voc含高次谐波,经三相lc滤波器滤除开关纹波后,通过线路电感lg与公共耦合点pcc相连。
7、作为本发明进一步改进,所述三相逆变器包括开关管s1、开关管s2、开关管s3、开关管s4、开关管s5、开关管s6构成的。
8、作为本发明进一步改进,控制系统建立在dq坐标系下,首先对输出电容电压和输出电流进行采样,由功率外环计算得到输出电压的电压幅值和角频率参考,然后在得到的参考电压幅值上减去相应的虚拟阻抗压降,作为内环的参考;
9、经过电压电流双闭环控制后,将调制信号用于空间矢量调制,最终输出开关管驱动信号;其中,电压电流双闭环控制中,电压环pi控制器为kpu+kiu/s,电流内环比例系数为ki;虚拟阻抗由虚拟电感和虚拟电阻构成,分别表示为lv和rv。
10、作为本发明进一步改进,各台并联逆变器线路阻抗不一致,虚拟阻抗初始值lv保持一致;控制系统在检测到同步触发信号后,在初始值lv的基础上增大虚拟阻抗值。
11、作为本发明进一步改进,各台并联逆变器调节虚拟阻抗值的时刻由同步触发信号决定,且每个同步触发信号之间相隔一段时间。
12、作为本发明进一步改进,根据无功功率变化趋势判断虚拟阻抗的调节方向,包括:
13、若无功功率分配增加,则减小其虚拟阻抗值;
14、若无功功率分配减少,则增大其虚拟阻抗值。
15、作为本发明进一步改进,各台并联逆变器接收到同步触发信号后,将当前时刻下的无功功率值与上一触发时刻下的无功功率值进行比较,若大于判断阈值qδ,则将虚拟阻抗值减去lv_per;若小于-qδ,则将虚拟阻抗值增大lv_per;
16、打破系统稳态平衡后两台逆变器功率变化过程如下:
17、
18、式中,为第i台逆变器第n次迭代后的无功功率,x1、x2分别为两台逆变器连接的线路阻抗,lv为虚拟阻抗初始值,lv_add为虚拟阻抗扰动值;
19、引入迭代虚拟阻抗策略后两台逆变器功率变化过程如下:
20、
21、式中,为第i台逆变器第n次迭代后的无功功率,x1、x2分别为两台逆变器连接的线路阻抗,lv为虚拟阻抗初始值,lv_add为虚拟阻抗扰动值,lv_per为虚拟阻抗迭代步长。
22、作为本发明进一步改进,判断调节过程完成的条件为k>迭代执行次数阈值。
23、与现有技术比,本发明具有如下优点:
24、本发明提出了自适应虚拟阻抗调节策略来补偿线路阻抗之间的不匹配,以实现微电网中并联逆变器的无功功率精确分配。在并联系统进入稳态后,各台逆变器通过接收同步触发信号指令,在同一时刻以相同的调节步长增大各自虚拟阻抗值,以打破无功功率分配现状,再根据无功功率变化趋势判断虚拟阻抗的调节方向,最终各台逆变器的无功功率分配会随着总阻抗的逼近而趋于相等。该方法实现了很好的均功率和均流效果,规避了潜在的装置过流和过热风险。相比于现有的改进下垂控制方法和虚拟阻抗参数调节方法,本方案无需测量pcc点电压,对通信网络要求较低,系统可靠性和安全性更高。
技术特征:
1.一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,包括:
2.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,所述逆变器为采用下垂控制的三相并联逆变器;
3.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,所述三相逆变器包括开关管s1、开关管s2、开关管s3、开关管s4、开关管s5、开关管s6构成的。
4.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,控制系统建立在dq坐标系下,首先对输出电容电压和输出电流进行采样,由功率外环计算得到输出电压的电压幅值和角频率参考,然后在得到的参考电压幅值上减去相应的虚拟阻抗压降,作为内环的参考;
5.根据权利要求4所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,各台并联逆变器线路阻抗不一致,虚拟阻抗初始值lv保持一致;控制系统在检测到同步触发信号后,在初始值lv的基础上增大虚拟阻抗值。
6.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,各台并联逆变器调节虚拟阻抗值的时刻由同步触发信号决定,且每个同步触发信号之间相隔一段时间。
7.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,根据无功功率变化趋势判断虚拟阻抗的调节方向,包括:
8.根据权利要求7所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,各台并联逆变器接收到同步触发信号后,将当前时刻下的无功功率值与上一触发时刻下的无功功率值进行比较,若大于判断阈值qδ,则将虚拟阻抗值减去lv_per;若小于-qδ,则将虚拟阻抗值增大lv_per;
9.根据权利要求1所述的一种下垂控制并联逆变器自适应虚拟阻抗调节方法,其特征在于,判断调节过程完成的条件为k>迭代执行次数阈值。
技术总结
本发明属于逆变器控制技术领域,提供了一种下垂控制并联逆变器自适应虚拟阻抗调节方法,包括:各台并联逆变器通过接收同步触发信号指令,在同一时刻以相同的调节步长增大各自虚拟阻抗值;再根据无功功率变化趋势判断虚拟阻抗的调节方向,根据调节方向调整虚拟阻抗值,使得最终各台逆变器的无功功率分配会随着总阻抗的逼近而趋于相等。相比于现有应对线路阻抗不匹配的调节方法,本发明所提方案无需测量PCC点电压,且对并联系统的通信带宽要求较低。
技术研发人员:张岩,陈伟,杨本瀚,李现亭,刘增,刘进军
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!