用于估计马达速度的系统和方法与流程
本公开涉及电动马达控制,并且特别地涉及用于提供快速循环马达速度观测器的系统和方法。
背景技术:
1、交通工具,诸如汽车、卡车、运动型多用途车、跨界车、小型货车、船舶、飞机、全地形车、休旅车或其它合适的交通工具,包括转向系统,诸如电动助力转向(eps)系统、线控转向(sbw)转向系统、液压转向系统或其它合适的转向系统。转向系统被配置为控制交通工具的转向的各个方面。
2、通常,这样的转向系统可以包括或使用一个或多个电动马达,诸如一个或多个永磁同步马达(pmsm)或其它合适的马达或电机。马达电流调节对于电动马达的马达轴处的扭矩产生通常是重要的。为了调节马达绕组电流,具有精确的角度测量值和相电流测量值通常是重要的。相电流测量值和角度测量值可以用于通过数学变换(例如,诸如park-clark变换)的手段将三相交流电(ac)变换为直流电(dc)表示。此外,角度测量值可以用于估计马达的转子速度。
技术实现思路
1、本公开总体上涉及电动马达控制。
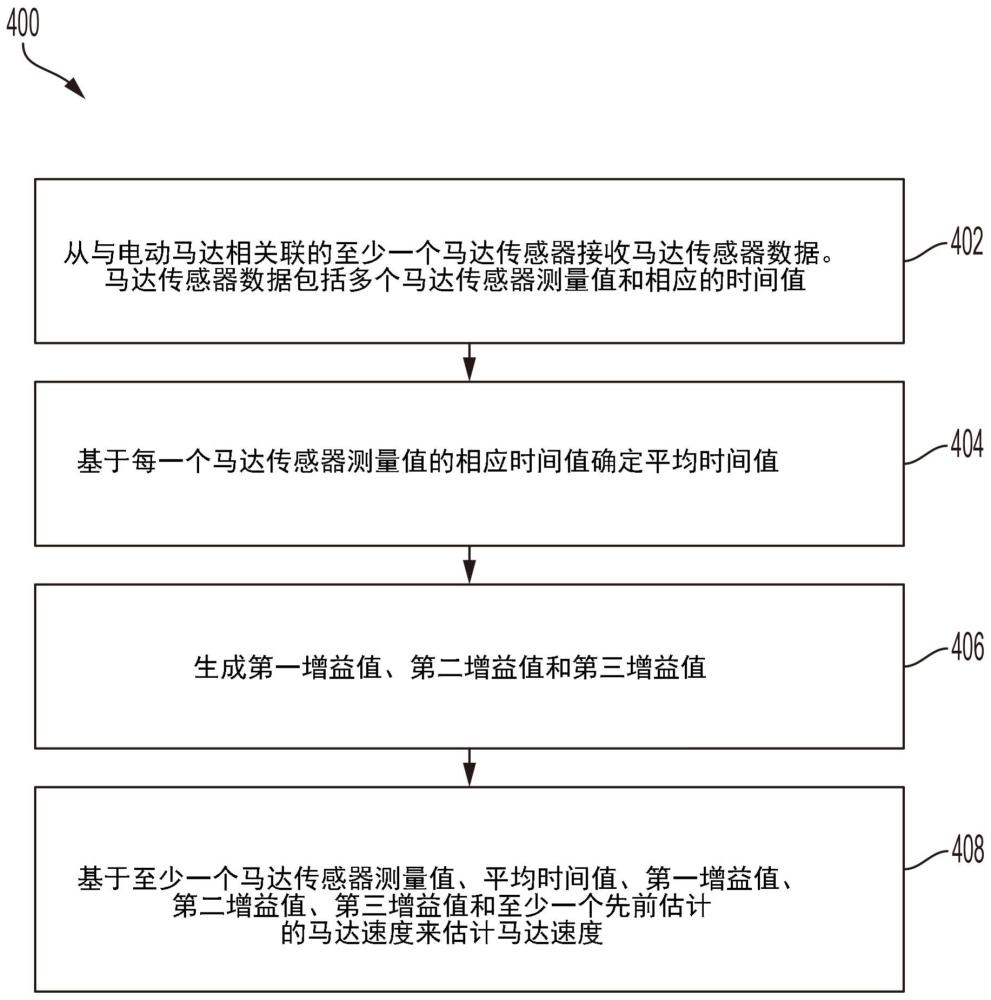
2、所公开实施例的一个方面包括一种用于确定马达速度的方法。该方法包括从与电动马达相关联的至少一个马达传感器接收马达传感器数据,马达传感器数据包括多个马达传感器测量值和相应的时间值;基于每一个马达传感器测量值的相应时间值来确定平均时间值;生成第一增益值、第二增益值和第三增益值,第一增益值是基于至少平均时间值生成的;以及基于至少一个马达传感器测量值、平均时间值、第一增益值、第二增益值、第三增益值和至少一个先前估计的马达速度来估计马达速度。
3、所公开实施例的另一方面包括一种用于确定马达速度的系统。该系统包括处理器和存储器。存储器包括指令,该指令在由处理器执行时使处理器:从与电动马达相关联的至少一个马达传感器接收马达传感器数据,马达传感器数据包括多个马达传感器测量值和相应的时间值;基于每一个马达传感器测量值的相应时间值来确定平均时间值;生成第一增益值、第二增益值和第三增益值,第一增益值是基于至少平均时间值生成的;以及基于至少一个马达传感器测量值、平均时间值、第一增益值、第二增益值、第三增益值和至少一个先前估计的马达速度来估计马达速度。
4、所公开实施例的另一方面包括一种用于确定马达速度的设备。该设备包括处理器和存储器。存储器包括指令,该指令在由处理器执行时使处理器:从与电动马达相关联的至少一个马达角度接收马达角度数据,该电动马达与电子动力转向系统相关联,马达角度数据包括多个马达角度测量值和相应的时间值;基于每一个马达传感器测量值的相应时间值来确定平均时间值;生成第一增益值、第二增益值和第三增益值,第一增益值是基于至少平均时间值生成的,并且第二增益值是基于至少第一增益值和平均时间值生成的;以及基于至少一个马达角度测量值、平均时间值、第一增益值、第二增益值、第三增益值和至少一个先前估计的马达速度来估计马达速度。
5、本公开的这些和其它方面在对实施例、所附权利要求和附图的以下详细描述中公开。
技术特征:
1.一种用于确定马达速度的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述马达传感器测量值包括马达角度测量值。
3.根据权利要求1所述的方法,其中,所述第二增益值是基于至少所述第一增益值和所述平均时间值生成的。
4.根据权利要求1所述的方法,还包括进一步基于至少一个其它先前估计的马达速度来估计所述马达速度,其中,所述至少一个其它先前估计的马达速度是在所述至少一个先前估计的马达速度之前估计的。
5.根据权利要求1所述的方法,其中,估计所述马达速度包括基于所述至少一个马达传感器测量值、所述平均时间值、所述第一增益值、所述第二增益值、所述第三增益值和所述至少一个先前估计的马达速度,使用离散传递函数来估计所述马达速度。
6.根据权利要求5所述的方法,其中,所述第一增益值、所述第二增益值和所述第三增益值被配置为降低所述离散传递函数中的噪声。
7.根据权利要求1所述的方法,其中,相应的时间值对应于不规则采样率。
8.根据权利要求1所述的方法,其中,所述电动马达与电子动力转向系统相关联。
9.一种用于确定马达速度的系统,所述系统包括:
10.根据权利要求9所述的系统,其中,所述马达传感器测量值包括马达角度测量值。
11.根据权利要求9所述的系统,其中,所述第二增益值基于至少所述第一增益值和所述平均时间值来生成。
12.根据权利要求9所述的系统,其中,所述指令还使所述处理器进一步基于至少一个其它先前估计的马达速度来估计所述马达速度,其中,所述至少一个其它先前估计的马达速度是在所述至少一个先前估计的马达速度之前估计的。
13.根据权利要求9所述的系统,其中,所述指令还使所述处理器基于所述至少一个马达传感器测量值、所述平均时间值、所述第一增益值、所述第二增益值、所述第三增益值和所述至少一个先前估计的马达速度,使用离散传递函数来估计所述马达速度。
14.根据权利要求13所述的系统,其中,所述第一增益值、所述第二增益值和所述第三增益值被配置为降低所述离散传递函数中的噪声。
15.根据权利要求9所述的系统,其中,所述相应的时间值对应于不规则采样率。
16.根据权利要求9所述的系统,其中,所述电动马达与电子动力转向系统相关联。
17.一种用于确定马达速度的设备,所述设备包括:
18.根据权利要求17所述的设备,其中,所述指令还使所述处理器基于所述至少一个马达传感器测量值、所述平均时间值、所述第一增益值、所述第二增益值、所述第三增益值和所述至少一个先前估计的马达速度,使用离散传递函数来估计所述马达速度。
19.根据权利要求18所述的设备,其中,所述第一增益值、所述第二增益值和所述第三增益值被配置为降低所述离散传递函数中的噪声。
20.根据权利要求17所述的设备,其中,所述相应的时间值对应于不规则采样率。
技术总结
一种用于确定马达速度的方法,包括:从与电动马达相关联的至少一个马达传感器接收马达传感器数据,马达传感器数据包括多个马达传感器测量值和相应的时间值;基于每一个马达传感器测量值的相应时间值来确定平均时间值;生成第一增益值、第二增益值和第三增益值,第一增益值是基于至少平均时间值生成的;以及基于至少一个马达传感器测量值、平均时间值、第一增益值、第二增益值、第三增益值和至少一个先前估计的马达速度来估计马达速度。
技术研发人员:N·吉金斯基,J·A·克莱瑙,A·维尔马
受保护的技术使用者:操纵技术IP控股公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!