一种调节三相永磁无刷直流电机系统机械特性的控制方法与流程
本发明属于无刷直流电机控制,具体涉及一种调节三相永磁无刷直流电机系统机械特性的控制方法。
背景技术:
1、由于串励电机具有软机械特性被广泛应用于驱动电动工具,但就自带电池的便携式电动工具而言,串励电机过重过大且效率过低,浪费了电池容量。又因串励电机是有刷电机,其寿命和可靠性存在明显不足,还会产生无线电干扰。
2、随着技术进步,体积小、效率高、功率大和控制调节方便的永磁无刷直流电机及其电子驱动系统的应用范围不断拓展。用它取代串励电机驱动电动工具成为典型的新技术应用案例,前途光明。
3、系统的机械特性为其转速随电磁转矩变化的曲线。目前驱动自带电池的便携式电动工具的永磁无刷直流电机系统采用开环控制,系统的机械特性硬,系统转速随负载转矩增大下降不明显,减弱了操作者对加工负载变化的体验;硬特性使系统输入电功率随负载转矩增大明显增大,加快了电池的放电速度,显著缩短了电池充一次电的使用时间。
4、有必要给驱动便携式电动工具的永磁无刷直流电机系统引入一种调节系统机械特性的控制方法,通过调节系统输出机械特性,改善使用者的操作体验,限制系统的输入电功率。
技术实现思路
1、本发明要解决上述现存技术问题,提供一种调节三相永磁无刷直流电机系统机械特性的控制方法,采用数字微控制器控制三相桥循环导通驱动三相永磁无刷直流电机运行,用电流负反馈控制调节系统的机械特性,步骤如下:
2、s1确定电流负反馈的控制周期为tf:为使控制周期与电机电流的脉动合拍,系统中数字微控制器的电流负反馈控制周期tf为三相桥中开关管循环导通周期的1~3整数倍;
3、s2获取每个控制周期tf内的负反馈电流i:系统负反馈电流i为电机的两相绕组串联导通电流在一个控制周期tf内的平均值,该电流从三相桥直流电源输入侧测取,再归算至电机侧;
4、s3设定负反馈电压uf与负反馈电流i的函数关系:按照系统的目标机械特性的要求设定函数关系f(i),系统中数字微控制器实施电流负反馈控制的电流负反馈电压uf=f(i);
5、s4系统实施控制周期为tf的电流负反馈控制:数字微控制器用上个控制周期测量计算获取的电流i计算本控制周期的负反馈电压uf=f(i),实施本控制周期的电流负反馈控制,测量计算获取本控制周期的电流i。
6、用电流负反馈控制调节系统的机械特性。设定电流负反馈控制时数字微控制器进行数字控制的周期tf,使控制周期与系统电流的脉动合拍。提供电流脉动合拍的控制周期tf计时方法。
7、作为反馈变量的电流i不仅要与电机的电磁转矩成正比,还要便于测量和计算处理。选定电流i,并提供测量计算获取途径。
8、在明确系统要求的目标机械特性的基础上,确定数字微控制器实施电流负反馈控制的电流负反馈电压uf=f(i),式中的f(i)为按照系统要求的目标机械特性设定的函数关系。
9、根据系统要求的目标机械特性,提供两个优选函数关系:uf=f(i)=k0i+k1(i-i1)ε(i-i1)+k2(i-i2)ε(i-i2)+km(i-im)ε(i-im)和uf=f(i)=k0i+k1i 2+km(i-im)ε(i-im),式中ε(i-i1)、ε(i-i2)和ε(i-im)分别为在i=i1、i=i2和i=im处产生阶跃的单位阶跃函数,i1、i2和im为目标机械特性的特征电流值。提供函数关系式中参数k0、k1、k2和km的设计方法。
10、数字微控制器以数控周期tf对系统实施电流负反馈控制循环,给出电流负反馈控制循环的控制流程,控制流程如下:
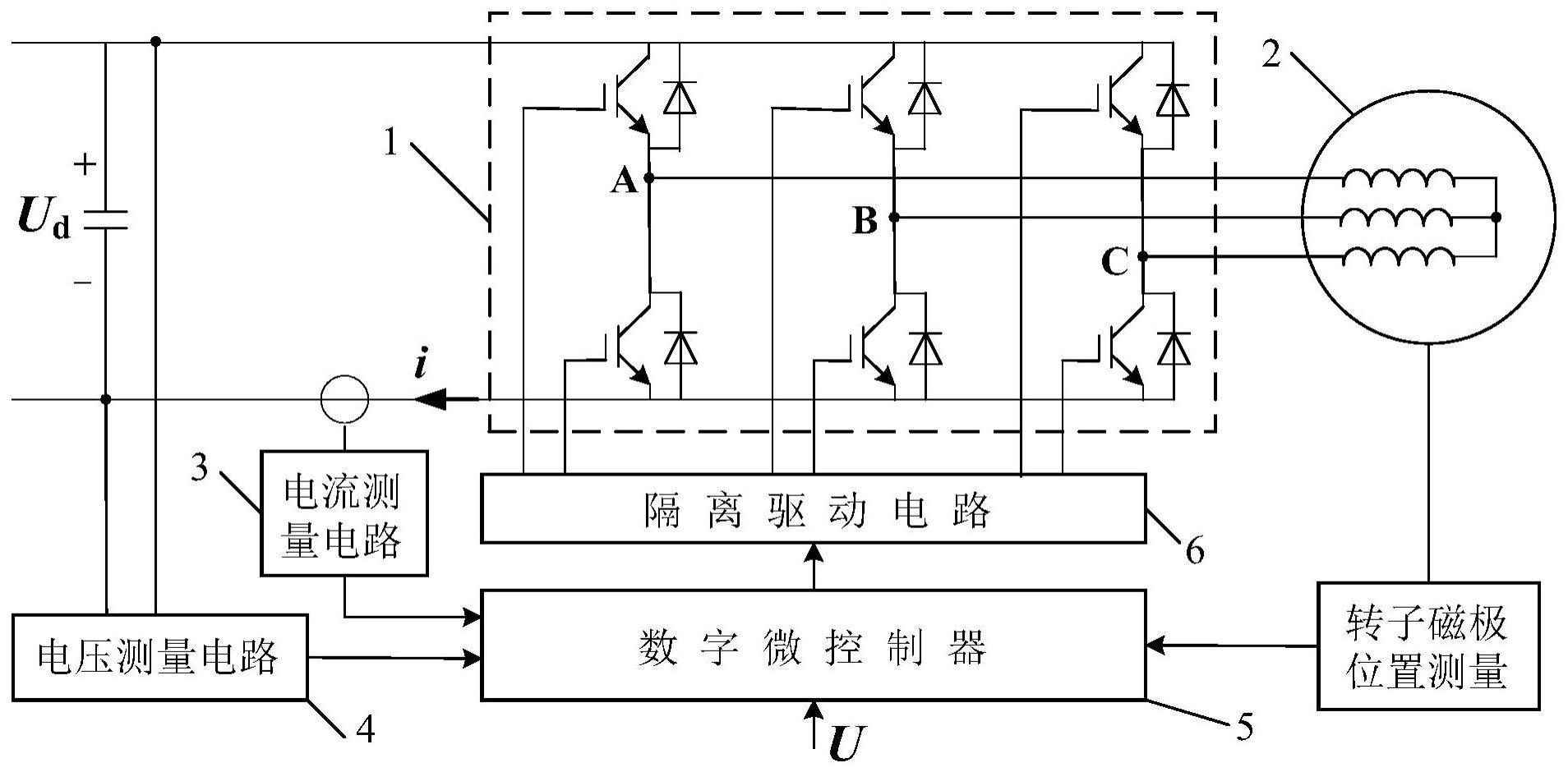
11、数字微控制器获取系统的设定输入电压u,获取上个控制周期的直流电源电压ud和负反馈电流i,计算本控制周期的电流负反馈电压uf=f(i),计算电机串联通电的两相绕组的端电压ua=u-uf,计算对三相桥的桥臂上管实施pwm控制的占空比ρ=ua/ud,通过隔离驱动电路输出占空比为ρ的pwm控制脉冲,对桥臂上管实施pwm控制,使电机串联通电的两相绕组的端电压ua=ρud,采集并计算直流电源电压ud和负反馈电流i,至本周期结束,下个控制周期开始。
12、本发明具有的有益效果:
13、给三相桥永磁无刷直流电机系统接入反馈电压uf=f(i)的电流负反馈,通过合理设定f(i)的函数关系和其中的参数,可获得期望的系统机械特性,改善使用者的操作体验,限制系统的输入电功率。
技术特征:
1.一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,采用数字微控制器控制三相桥循环导通驱动三相永磁无刷直流电机运行,用电流负反馈控制调节系统的机械特性,步骤如下:
2.根据权利要求1所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述控制周期tf的计时,采用三相桥(1)桥臂下管触发脉冲上升沿的计数值k,计时满则计数值k等于设定值k1,设定值k1等于3或6或9。
3.根据权利要求1或2所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述负反馈电流i的获取方法是:由电流测量电路(3)测量三相桥(1)直流电源输入侧电流i,滤除高次谐波,数字微控制器(5)采集并计算其在一个tf周期内的平均值,再除该tf周期内三相桥(1)桥臂上管pwm控制的占空比ρ。
4.根据权利要求3所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述设定负反馈电压uf与负反馈电流i的函数关系为:将转速随电流增大下降慢的系统开环直线机械特性,调节为有不同斜率的折线机械特性,系统有反馈电流i1、i2和im,且0<i1<i2<im,要求电流0~i1时的系统特性轻载段的转速随电流增大下降斜率较大,电流i1~i2时的特性中载段转速下降斜率较小,电流i2~im时的特性重载段转速下降斜率较大,电流i>im时的特性过载保护段转速随电流增大急骤下降。
5.根据权利要求4所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,轻载段特性转速随电流增大而下降的斜率为开环时斜率的5~10倍,中载段特性斜率为开环时斜率的1~2倍,重载段特性斜率为开环时斜率的5~10倍。
6.根据权利要求5所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,i=im时转速n=(0.1~0.3)(u/ce),式中(u/ce)为电机(2)的理想空载转速,过载保护堵转时电流ist=(1.05~1.15)im。
7.根据权利要求6所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述设定负反馈电压uf与负反馈电流i的函数关系:设定uf=f(i)=k0i+k1(i-i1)ε(i-i1)+k2(i-i2)ε(i-i2)+km(i-im)ε(i-im),式中ε(i-i1)、ε(i-i2)和ε(i-im)分别为在i=i1、i=i2和i=im处产生阶跃的单位阶跃函数,依据目标机械特性转速随电流增大而下降的斜率与开环时特性斜率的关系,式中参数k0=(4~9)2r、k1=(0~1)2r-k0、k2=(4~9)2r-k0-k1,参数计算式中的r为电机(2)一相绕组的电阻。
8.根据权利要求6所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述设定负反馈电压uf与负反馈电流i的函数关系:因i=im时转速n=(0.1~0.3)(u/ce),要求(2r+k0)im+k1(im-i1)+k2(im-i2)=(0.9~0.7)u,否则应在取值范围内调整k0、k1和k2的取值,因n=0时,i=ist=(1.05~1.15)im,故参数km=[u-2rist-k0ist-k1(ist-i1)-k2(ist-i2)]/(ist-im)。
9.根据权利要求2所述的一种调节三相永磁无刷直流电机系统机械特性的控制方法,其特征在于,所述系统实施控制周期为tf的电流负反馈控制的流程:数字微控制器(5)获取系统的设定输入电压u,获取上个控制周期的直流电源电压ud和负反馈电流i,令k=0,本控制周期开始,计算本控制周期的电流负反馈电压uf=f(i),计算电机(2)串联通电的两相绕组的端电压ua=u-uf,计算对三相桥(1)桥臂上管实施pwm控制的占空比ρ=ua/ud,通过隔离驱动电路(6)输出占空比为ρ的pwm控制脉冲,对桥臂上管实施pwm控制,使电机(2)串联通电的两相绕组的端电压ua=ρud,采集电流测量电路(3)测取的电流i并计算平均值iav,采集电压测量电路(4)测取的电压并计算平均值ud,桥臂下管每接受一个触发脉冲上升沿,上升沿计数值k=k+1,当k=k1时,获取本周期的平均值iav和ud,计算电流i=iav/ρ,令k=0,本控制周期结束,下一个控制周期开始。
技术总结
本发明是一种采用电流负反馈调节三相桥永磁无刷直流电机系统机械特性的控制方法。该控制方法选定与电磁转矩成正比的负反馈电流I,给出电流I的测量计算获取途经;设定了与电流I脉动合拍的负反馈循环控制周期,给出与电流I脉动合拍的计时方法;依据调节系统机械特性的要求,设定系统电流负反馈电压U<subgt;f</subgt;=f(I),提供了两种优选的f(I)函数关系及其参数的设计方法;给出了系统中数字微控制器实施电流负反馈控制循环的控制流程。该发明可调节系统获得期望的机械特性,改善使用者的操作体验,限制系统的输入电功率。
技术研发人员:赵乾麟,彭亦稰,叶佳宙,赵屹
受保护的技术使用者:浙江乾麟缝制设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!