一种实现自动拆换线的电力线路检修用机器人的制作方法
本发明涉及电力线路检修相关,具体为一种实现自动拆换线的电力线路检修用机器人。
背景技术:
1、电力线路指的是在发电厂、变电站和电力用户间用来传送电能的线路,是供电系统的重要组成部分,担负着输送和分配电能的任务,为了保障电力线路的持续稳定工作,需要定期对电力线路进行检修以及故障排查,当电力线路中的传输线缆发生破损或者断裂时,需要及时对破损或者断裂的线缆进行接线操作,传统的使用人工进行接线效率较低,因而可借助于相应的检修机器人来完成辅助接线操作;
2、但是,通常所使用的电力线路检修用机器人,仍存在以下不足:
3、1.现有的电力线路检修用机器人,在实际使用过程中,由于线缆接线维护大多在户外进行操作,户外地形较为复杂,设备在户外使用过程中的稳定性较差,甚至容易发生侧翻或者倾倒;
4、2.现有的电力线路检修用机器人,不方便对需要维护的线缆的两端分别进行自动的夹持以及输送,影响对线缆的剥开以及线缆与接线铜管之间的焊接操作,维护的效率较低;
5、3.现有的电力线路检修用机器人,不方便对线缆与铜管之间进行自动对接,整体的自动化程度较低,对铜管的固定效果交叉,而且机器人设备的功能性较为单一,在户外不方便对所需的其他设备与工具进行存储。
6、因此,我们提出一种实现自动拆换线的电力线路检修用机器人,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种实现自动拆换线的电力线路检修用机器人,以解决上述背景技术提出的在实际使用过程中,由于线缆接线维护大多在户外进行操作,户外地形较为复杂,设备在户外使用过程中的稳定性较差,甚至容易发生侧翻或者倾倒,不方便对需要维护的线缆的两端分别进行自动的夹持以及输送,影响对线缆的剥开以及线缆与接线铜管之间的焊接操作,维护的效率较低,不方便对线缆与铜管之间进行自动对接,整体的自动化程度较低,对铜管的固定效果交叉,而且机器人设备的功能性较为单一,在户外不方便对所需的其他设备与工具进行存储的问题。
2、为实现上述目的,本发明提供如下技术方案:一种实现自动拆换线的电力线路检修用机器人,包括机器人设备主体、对称设置在所述机器人设备主体上方左右两侧的线缆以及用于连接的铜管;
3、其中,所述机器人设备主体上端的中部固定连接有固定架;
4、还包括:
5、辅助机构,所述辅助机构对称设置在机器人设备主体的左右两侧,且辅助机构用于对机器人设备主体进行辅助支撑;
6、活动杆,所述活动杆转动连接在固定块的上端,且固定块结合凸杆和固定筒用于对活动板与机器人设备主体之间进行限位;
7、支撑架,所述支撑架固定连接在支撑板的上端,且支撑架通过支撑板带动线缆在机器人设备主体的上端构成伸缩结构;
8、定位机构,所述定位机构用于对线缆进行夹持定位;
9、其中,所述定位机构包括固定连接在电动伸缩杆输出端的连接块、用于连接的连接套、呈“t”字形结构的连接杆、铰链连接在支撑架前后两端的连接柱和铰链连接在连接柱上端的固定夹块。
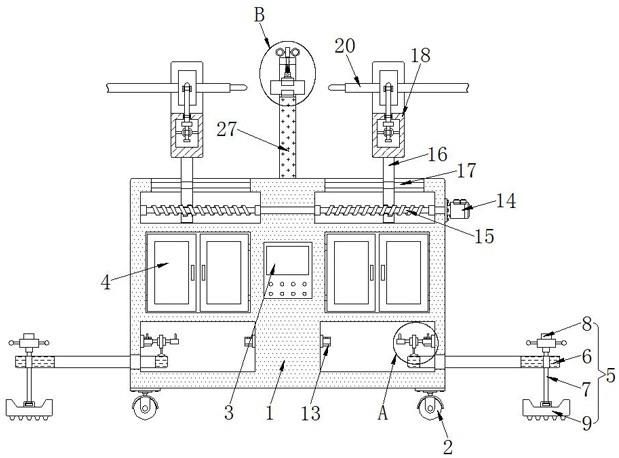
10、优选的,所述机器人设备主体的下端安装有万向轮,且机器人设备主体的前侧安装有控制面板,并且机器人设备主体的中部设置有存放柜,而且机器人设备主体的右上端安装有用于驱动的伺服电机。
11、优选的,所述辅助机构包括滑动连接在机器人设备主体左右两端的活动板、用于调节的活动栓、固定连接在所述活动栓上端的转把和用于支撑的承载板。
12、优选的,所述活动栓螺纹连接在活动板的外侧,且活动栓的下端转动连接有承载板,并且活动栓带动承载板在活动板的下端构成伸缩结构,而且活动板内侧的上端固定连接有固定块。
13、优选的,所述固定块与活动杆的连接处设置有扭簧,且活动杆上端的左右两侧均固定连接有用于定位的凸杆,并且活动杆插接在固定筒的中部,而且活动杆带动凸杆与固定筒之间进行卡合;
14、其中,所述固定筒分别固定连接在机器人设备主体下端的内外两侧。
15、优选的,所述伺服电机的输出端固定连接有丝杆,且伺服电机带动丝杆在机器人设备主体的上端进行转动,并且丝杆与支撑板之间通过螺纹的方式相连接,而且丝杆左右两端的螺纹方向相反。
16、优选的,所述丝杆带动支撑板与固定杆之间构成左右滑动结构,且固定杆分别固定连接在机器人设备主体上端的左右两侧,并且支撑板带动支撑架在机器人设备主体的上端进行左右移动,而且支撑架的中部设置有线缆;
17、其中,所述支撑架的中部安装有电动伸缩杆,所述电动伸缩杆带动连接块与连接套之间进行转动。
18、优选的,所述连接套滑动连接在连接杆的外表面,且连接杆固定连接在连接柱的下端,并且连接杆通过连接柱带动固定夹块在支撑架的中部进行翻转,而且固定夹块分别对称设置在支撑架的前后两侧。
19、优选的,所述固定架的中部固定连接有下夹块,且下夹块的中部卡合连接有铜管,并且铜管与上夹块之间卡合连接,而且上夹块上端的前后两侧均卡合连接有活动柱;
20、其中,所述活动柱的外表面套设有弹簧,且活动柱滑动连接在固定架的上端。
21、优选的,所述活动柱下端的侧面固定连接有安装柱,且安装柱与固定架之间通过卡槽的方式相连接,并且安装柱与安装帽之间通过螺纹的方式相连接,而且安装帽卡合连接在固定槽中;
22、其中,所述固定槽分别开设于固定架的前后侧面。
23、与现有技术相比,本发明的有益效果是:该实现自动拆换线的电力线路检修用机器人,在实际使用过程中,通过辅助机构的设置,便于对机器人设备主体进行辅助支撑,提升机器人设备在户外使用过程中的稳定性,通过定位机构和上夹块的设置,便于对线缆和铜管进行稳定夹持定位,结合支撑板与固定杆之间进行滑动,便于自动对线缆和铜管之间进行对接安装,使用非常方便;
24、1.设有存放柜和辅助机构,通过存放柜的设置,便于对所需要的其他设备或者工具进行存储,结合辅助机构对机器人设备主体进行辅助支撑,提升机器人设备在户外使用过程中的稳定性;
25、2.设有支撑板、固定杆和支撑架,通过支撑板与固定杆之间进行滑动,带动支撑架在机器人设备主体的上端进行左右移动,从而便于对线缆与铜管之间进行自动对接接线;
26、3.设有定位机构和上夹块,通过定位机构和上夹块的设置,便于对定位机构和上夹块进行稳定夹持定位,提升在对接检修过程中的稳定性。
技术特征:
1.一种实现自动拆换线的电力线路检修用机器人,包括机器人设备主体(1)、对称设置在所述机器人设备主体(1)上方左右两侧的线缆(20)以及用于连接的铜管(29);
2.根据权利要求1所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述机器人设备主体(1)的下端安装有万向轮(2),且机器人设备主体(1)的前侧安装有控制面板(3),并且机器人设备主体(1)的中部设置有存放柜(4),而且机器人设备主体(1)的右上端安装有用于驱动的伺服电机(14)。
3.根据权利要求1所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述辅助机构(5)包括滑动连接在机器人设备主体(1)左右两端的活动板(6)、用于调节的活动栓(7)、固定连接在所述活动栓(7)上端的转把(8)和用于支撑的承载板(9)。
4.根据权利要求3所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述活动栓(7)螺纹连接在活动板(6)的外侧,且活动栓(7)的下端转动连接有承载板(9),并且活动栓(7)带动承载板(9)在活动板(6)的下端构成伸缩结构,而且活动板(6)内侧的上端固定连接有固定块(10)。
5.根据权利要求4所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述固定块(10)与活动杆(11)的连接处设置有扭簧,且活动杆(11)上端的左右两侧均固定连接有用于定位的凸杆(12),并且活动杆(11)插接在固定筒(13)的中部,而且活动杆(11)带动凸杆(12)与固定筒(13)之间进行卡合;
6.根据权利要求2所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述伺服电机(14)的输出端固定连接有丝杆(15),且伺服电机(14)带动丝杆(15)在机器人设备主体(1)的上端进行转动,并且丝杆(15)与支撑板(16)之间通过螺纹的方式相连接,而且丝杆(15)左右两端的螺纹方向相反。
7.根据权利要求6所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述丝杆(15)带动支撑板(16)与固定杆(17)之间构成左右滑动结构,且固定杆(17)分别固定连接在机器人设备主体(1)上端的左右两侧,并且支撑板(16)带动支撑架(18)在机器人设备主体(1)的上端进行左右移动,而且支撑架(18)的中部设置有线缆(20);
8.根据权利要求7所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述连接套(23)滑动连接在连接杆(24)的外表面,且连接杆(24)固定连接在连接柱(25)的下端,并且连接杆(24)通过连接柱(25)带动固定夹块(26)在支撑架(18)的中部进行翻转,而且固定夹块(26)分别对称设置在支撑架(18)的前后两侧。
9.根据权利要求1所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述固定架(27)的中部固定连接有下夹块(28),且下夹块(28)的中部卡合连接有铜管(29),并且铜管(29)与上夹块(30)之间卡合连接,而且上夹块(30)上端的前后两侧均卡合连接有活动柱(31);
10.根据权利要求9所述的一种实现自动拆换线的电力线路检修用机器人,其特征在于:所述活动柱(31)下端的侧面固定连接有安装柱(33),且安装柱(33)与固定架(27)之间通过卡槽的方式相连接,并且安装柱(33)与安装帽(34)之间通过螺纹的方式相连接,而且安装帽(34)卡合连接在固定槽(35)中;
技术总结
本发明涉及电力线路检修相关技术领域,具体公开了一种实现自动拆换线的电力线路检修用机器人,包括机器人设备主体、对称设置在所述机器人设备主体上方左右两侧的线缆以及用于连接的铜管,辅助机构,所述辅助机构对称设置在机器人设备主体的左右两侧,活动杆,所述活动杆转动连接在固定块的上端,支撑架,所述支撑架固定连接在支撑板的上端,且支撑架通过支撑板带动线缆在机器人设备主体的上端构成伸缩结构,定位机构,所述定位机构用于对线缆进行夹持定位。该实现自动拆换线的电力线路检修用机器人,稳定性高,便于对线缆和铜管进行稳定夹持定位,结合支撑板与固定杆之间进行滑动,便于自动对线缆和铜管之间进行对接安装,实用性高。
技术研发人员:段家振,伍雪峰,黄勃,陆政,刘洪涛,史如新,陈燕南,树玉琴,任显铭,陈阳,夏芸
受保护的技术使用者:国网江苏省电力有限公司常州供电分公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!