一种双有源全桥变换器的滑模控制方法
本发明涉及电力电子,具体为一种双有源全桥变换器的滑模控制方法。
背景技术:
1、低碳、零碳能源转型以及现代能源体系的重塑,是实现可持续发展目标、应对气候变化、推动经济“绿色复苏”的必然选择,随着新能源与可再生能源为主体的能源体系的发展,基于新能源的直流微网系统逐渐成为了研究的热点,然而,随着新能源和随机负载大量接入直流微电网,随着直流微电网中电力电子负荷的激增所产生的扰动会对母线电压的稳定性造成不良的影响,双有源全桥变换器dc-dc变换器作为直流微网系统中关键的能量变换器,能够调节能量双向流动,且能够保持直流输出电压在各类扰动因素下的稳定,因此,围绕dab变换器对直流输出电压稳定和微电网稳定运行的问题,提出了各种拓扑变体和控制方案,dab的小信号模型在早期的线性控制器工作中被使用,传统的控制方法是采用比例积分的电压控制方法,以获得更好的动态性能,但当控制器参数与变换器电路参数不匹配时,性能会下降,此外,系统在固定工作点处的线性化使控制器在出现较大扰动时性能下降,此外还有一种基于前馈技术来提高鲁棒性的dab变换器的线性化谐波模型,但需要大量的计算过程来实时实现,此外,系统的查找表设计和谐波建模是一个复杂而繁琐的过程。
2、现有技术中,通常将非线性控制方法用于dab变换器的控制中以提高系统的性能,但这些非线性控制策略均高度依赖精确的数学模型,而dab变换器包含高频交流量且在对其进行建模时变换器所带负荷通常是复杂多变的,这就导致变换器系统建模困难,依赖于精确数学模型的控制方法适应场景有限、可移植性差。
技术实现思路
1、本发明的目的在于提供一种双有源全桥变换器的滑模控制方法,以解决上述背景技术提出的非线性控制策略均高度依赖精确的数学模型,而dab变换器包含高频交流量且在对其进行建模时变换器所带负荷通常是复杂多变的,这就导致变换器系统建模困难,依赖于精确数学模型的控制方法适应场景有限、可移植性差的问题。
2、为实现上述目的,本发明提供如下技术方案:一种双有源全桥变换器的滑模控制方法,包括以下步骤:
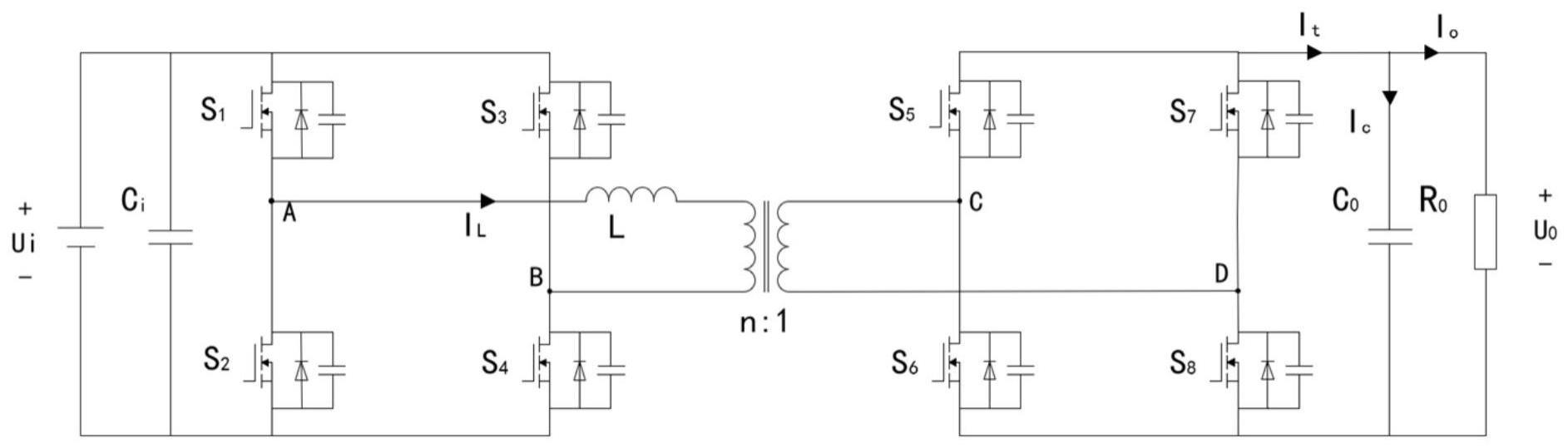
3、s1、根据dab变换器开关周期内的高频变压器左右两侧h桥的电压波形以及流过储能电感的电流波形,确定传输功率和移相角之间的关系表达式;
4、s2、由传输功率和移相角之间的关系可知,分析出dab输入端到输出端的功率传输取决于相移比、等效电感和开关频率;
5、s3、令输出功率po(t)=uo(t)io(t),稳定状态下,滤波电容和输出电阻之间的输出电压相对恒定,确定电容器的功率与能量对应的关系,定义系统的形式方程;
6、s4、定义系统误差;
7、s5、设计控制器的滑模变量;
8、s6、设置控制器输入;
9、s7、对控制器进行lyapunov闭环稳定性证明。
10、优选的,在步骤s1中,所述传输功率和移相角之间的关系表达式:
11、
12、式中,pt为传输功率,d为移相角。
13、优选的,在步骤s2中,二次桥在一个开关周期内的输出电流可表示为:
14、
15、优选的,在步骤s3中,所述电容器的功率与能量对应的关系表达式为:
16、
17、式中,pc为电容器的功率,eco为能量;
18、将上式简化后,输出电压动态方程表示为:
19、
20、式中,uo为输出电压,ro为输出电阻,co为滤波电容;
21、将传输功率和移相角之间的关系表达式和po=uoio代入上式中,得出系统的形式方程:
22、
23、其中,a(x)=-i0/c0,b(x)=ui/(2nfslc0),u=d(1-|d|),uo=a(x)+b(x)u。
24、优选的,在步骤s4中,所述系统误差表达式为:
25、
26、优选的,在步骤s5中,所述滑模变量表达式为:
27、s=e+k∫edt;
28、式中,s为滑模变量,k表示增益;其中,增益k是正系数,它们共同决定了动态误差的收敛速率;
29、在曲面s=0上的滑动运动记为:
30、e+k∫edt=0;
31、因此,动态误差可以表示为:
32、e=k0e-kt;
33、式中,ko表示稳态时输出电压的初始误差,当k>0且当t趋近于无穷时,该动态误差收敛于0。
34、优选的,对s求导可得:
35、
36、将uo=a(x)+b(x)u代入上式可得:
37、
38、优选的,在步骤s6中,所述控制器输入为u,所述u的表达式为:
39、u=up+uq;
40、式中,将系统状态轨线带入到滑动变量上的模型等效部分用up表示,而保证系统的状态不离开滑动变化的切换控制部分用uq表示,令公式中则模型等效输入up则为:
41、
42、切换控制部分uq选取指数趋近律,由两部分组成:
43、
44、式中,ε、ks为大于0的常数;
45、将up和uq代入公式u=up+uq中得出控制器输入u为:
46、
47、优选的,在步骤s7中,所述lyapunov闭环稳定性证明的流程为将带入中化简得出:
48、
49、选取lyapunov函数v为:
50、
51、式中,v>0,根据lyapunov稳定性准则,要确保即
52、对上式进行求导,并将带入得出:
53、
54、式中,由于函数v是正定的,是半负定的,所以该控制系统是渐进稳定的。
55、与现有技术相比,本发明的有益效果是:
56、本方法中当负载发生阶跃变化时,能够快速回复平衡,且输出电压和输出电流波形无明显的超调量和波动,不依赖于被控对象精确的数学模型,对负载波动、参数摄动具有较强的鲁棒性,非常适合控制dab变换器这类非线性系统,引入指数趋近律后,不但能够保持滑模控制的优点还能够更加有效的抑制系统抖振,所以采用基于指数趋近律的滑模控制可以提高系统对负载波动、输入电压突变、参考电压改变等不确定因素的鲁棒性。
技术特征:
1.一种双有源全桥变换器的滑模控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s1中,所述传输功率和移相角之间的关系表达式:
3.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s2中,二次桥在一个开关周期内的输出电流可表示为:
4.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s3中,所述电容器的功率与能量对应的关系表达式为:
5.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s4中,所述系统误差表达式为:
6.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s5中,所述滑模变量表达式为:
7.根据权利要求6所述的一种双有源全桥变换器的滑模控制方法,其特征在于,对s求导可得:
8.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s6中,所述控制器输入为u,所述u的表达式为:
9.根据权利要求1所述的一种双有源全桥变换器的滑模控制方法,其特征在于,在步骤s7中,所述lyapunov闭环稳定性证明的流程为将u=带入中化简得出:
技术总结
本发明公开了一种双有源全桥变换器的滑模控制方法,包括以下步骤:S1、根据DAB变换器开关周期内的高频变压器左右两侧H桥的电压波形以及流过储能电感的电流波形,确定传输功率和移相角之间的关系表达式;S2、由传输功率和移相角之间的关系可知,分析出DAB输入端到输出端的功率传输取决于相移比、等效电感和开关频率;S3、稳定状态下,滤波电容和输出电阻之间的输出电压相对恒定,确定电容器的功率与能量对应的关系,定义系统的形式方程。本发明当负载发生阶跃变化时,能够快速回复平衡,且输出电压和输出电流波形无明显的超调量和波动,不依赖于被控对象精确的数学模型,对负载波动、参数摄动具有较强的鲁棒性。
技术研发人员:谷俊杰,潘三博
受保护的技术使用者:上海电机学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!