步进电机控制方法和装置与流程
本发明涉及步进电机控制,具体涉及一种步进电机控制方法和装置。
背景技术:
1、步进电机是一种特殊的直流电机,把驱动电路的驱动信号转换成电机的位移角度,其结构特殊且不断改善,可提供高精度、高力矩和高准确性的控制。步进电机通常认为可以实现任意方向旋转,实际上它是特殊电动机,将给定的控制信号转换成有效的步进角,真正实现旋转的是步进电机驱动转角舵机(舵机),舵机有较好的响应性,在很短的时间内即可完成控制,而低速电动机无法达到这样的要求,另外,舵机的驱动器可提供较高的输出转矩,着力点和节点的操作较精确,因而在各类行业上被普遍的使用。
2、步进电机的缺点是零点的不确认性以及失步现象,在精确控制行业,使用步进电机进行运动控制,进而实现闭环控制仍是一大难题。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术中使用步进电机进行运动控制,进而实现闭环控制困难的问题,从而提供一种步进电机控制方法和装置。
2、第一方面,本发明公开实施例提供了一种步进电机控制方法,被控步进电机的码盘设有一个特殊码齿,所述特殊码齿的宽度小于其它码齿,所述方法包括:
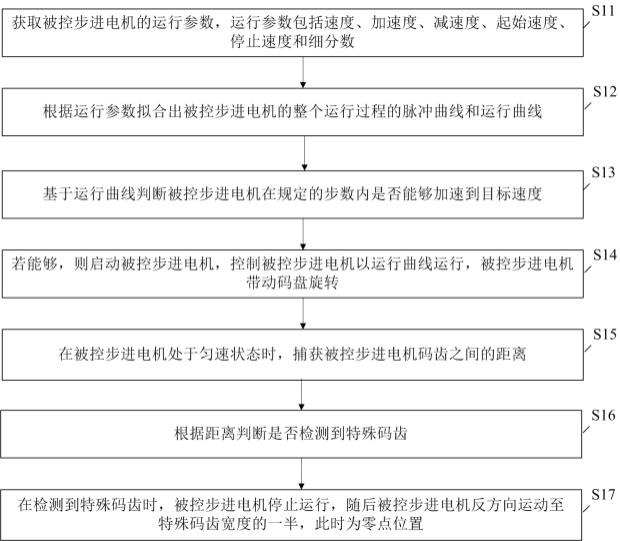
3、获取被控步进电机的运行参数,所述运行参数包括速度、加速度、减速度、起始速度、停止速度和细分数;
4、根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线;
5、基于所述运行曲线判断被控步进电机在规定的步数内是否能够加速到目标速度;
6、若能够,则启动被控步进电机,控制被控步进电机以所述运行曲线运行,被控步进电机带动码盘旋转;
7、在被控步进电机处于匀速状态时,捕获被控步进电机码齿之间的距离;
8、根据距离判断是否检测到所述特殊码齿;
9、在检测到所述特殊码齿时,被控步进电机停止运行,随后被控步进电机反方向运动至所述特殊码齿宽度的一半,此时为零点位置。
10、可选地,根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线为:通过逐脉冲式的梯形加减速算法根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线。
11、可选地,所述捕获被控步进电机码齿之间的距离包括:通过三线光耦将码盘的信号转化为电信号传输到微控制单元中;微控制单元通过定时器输入目标引脚,对目标引脚进行捕获;根据捕获信息计算码齿和码齿之间的距离。
12、可选地,所述码盘为圆形码盘。
13、可选地,所述码盘带有30个码齿。
14、可选地,所述特殊码齿的宽度是码盘上其它码齿的十分之一。
15、可选地,所述码盘上的码齿为塑料材质或金属材质。
16、第二方面,本发明公开实施例提供了一种步进电机控制装置,被控步进电机的码盘设有一个特殊码齿,所述特殊码齿的宽度小于其它码齿,所述装置包括:
17、参数获取模块,用于获取被控步进电机的运行参数,所述运行参数包括速度、加速度、减速度、起始速度、停止速度和细分数;
18、运行规律拟合模块,用于根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线;
19、条件判断模块,用于基于所述运行曲线判断被控步进电机在规定的步数内是否能够加速到目标速度;
20、运行模块,用于若能够,则启动被控步进电机,控制被控步进电机以所述运行曲线运行,被控步进电机带动码盘旋转;
21、码齿间距捕获模块,用于在被控步进电机处于匀速状态时,捕获被控步进电机码齿之间的距离;
22、调零模块,用于根据距离判断是否检测到所述特殊码齿,在检测到所述特殊码齿时,被控步进电机停止运行,随后被控步进电机反方向运动至所述特殊码齿宽度的一半,此时为零点位置。
23、第三方面,本发明公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
24、第四方面,本发明公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
25、本发明的实施例提供的技术方案可以具有以下有益效果:
26、被控步进电机的码盘设有一个特殊码齿,特殊码齿的宽度小于其它码齿,根据被控步进电机的运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线;基于运行曲线判断被控步进电机在规定的步数内是否能够加速到目标速度;若能够,则启动被控步进电机,控制被控步进电机以运行曲线运行,被控步进电机带动码盘旋转;在被控步进电机处于匀速状态时,根据被控步进电机码齿之间的距离判断是否检测到特殊码齿;在检测到特殊码齿时,被控步进电机停止运行,随后被控步进电机反方向运动特殊的一半,此时为零点位置,该步进电机快速回零方案,具有高精度、低成本和高可靠性。解决了当前步进电机在工业环境下测量精度易受影响、高精度编码器价格比较昂贵等弊端,步进电机可以不借助编码器的情况下,快速的找到零点,且不受温度,灰尘等的影响,简单便捷,高精度、鲁棒性好。
技术特征:
1.一种步进电机控制方法,其特征在于,被控步进电机的码盘设有一个特殊码齿,所述特殊码齿的宽度小于其它码齿,所述方法包括:
2.根据权利要求1所述的步进电机控制方法,其特征在于,根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线为:通过逐脉冲式的梯形加减速算法根据所述运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线。
3.根据权利要求2所述的步进电机控制方法,其特征在于,所述捕获被控步进电机码齿之间的距离包括:
4.根据权利要求3所述的步进电机控制方法,其特征在于,所述码盘为圆形码盘。
5.根据权利要求4所述的步进电机控制方法,其特征在于,所述码盘带有30个码齿。
6.根据权利要求5所述的步进电机控制方法,其特征在于,所述特殊码齿的宽度是码盘上其它码齿的十分之一。
7.根据权利要求6所述的步进电机控制方法,其特征在于,所述码盘上的码齿为塑料材质或金属材质。
8.一种步进电机控制装置,其特征在于,被控步进电机的码盘设有一个特殊码齿,所述特殊码齿的宽度小于其它码齿,所述装置包括:
9.一种计算机设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至7中任一项所述步进电机控制方法。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至7中任一项所述步进电机控制方法。
技术总结
本申请公开提供了一种步进电机控制方法和装置,涉及步进电机控制技术,该方法被控步进电机的码盘设有一个特殊码齿,特殊码齿的宽度小于其它码齿,方法包括:获取被控步进电机的运行参数,根据运行参数拟合出被控步进电机的整个运行过程的脉冲曲线和运行曲线;基于运行曲线判断被控步进电机在规定的步数内是否能够加速到目标速度;若能够,则启动被控步进电机,控制被控步进电机以运行曲线运行,在被控步进电机处于匀速状态时,根据被控步进电机码齿之间的距离判断是否检测到特殊码齿;在检测到特殊码齿时,被控步进电机停止运行,随后被控步进电机反方向运动至特殊码齿宽度的一半,此时为零点位置,解决了现有技术中调零困难的问题。
技术研发人员:钟志刚,吕晓俊,王子龙,何雷,冯攀延
受保护的技术使用者:深圳市恒永达科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!