一种电机转速控制方法、装置、介质与流程
本申请涉及电机控制领域,特别是涉及一种电机转速控制方法、装置、介质。
背景技术:
1、随着交流传动技术的发展,由变频器和感应电机组成的传动系统已广泛应用于港口起重、煤炭输送、石油钻井等关键性行业。转速闭环的感应电机矢量控制系统一般需要安装速度传感器,这会增加硬件和维护成本,降低系统的可靠性,并且在某些环境恶劣的场合速度传感器无法安装使用。因此无速度传感器的感应电机传动系统在行业内得到广泛应用。
2、在具体实施中,为了更好的控制无速度传感器电机工作,需要对电机的转速进行观测。目前常用的电机转速观测方法主要包括模型参考自适应法、全阶磁链观测器、降阶磁链观测器、滑膜观测器、扩展卡尔曼滤波法、人工神经网络法等。但这些电机转速观测方法均存在低速发电运行不稳定区域。当电机工作在低速发电状态时,观测器无法准确的对电机的转速进行观测,无法对电机进行稳定控制。
3、由此可见,如何提供一种更可靠的电机转速观测方法,以准确可靠的确定电机在不同状态下的转速并对电机进行控制,是本领域技术人员亟需解决的问题。
技术实现思路
1、本申请的目的是为了解决现有技术中当电机处于低速运行状态时无法准确观测电机转速导致无法对电机进行可靠控制的情况,因此,本申请提供了一种电机转速控制方法、装置、介质,以准确可靠的确定电机在不同状态下的转速并对电机进行控制。
2、为了解决上述技术问题,本申请提供了一种电机转速控制方法,包括:
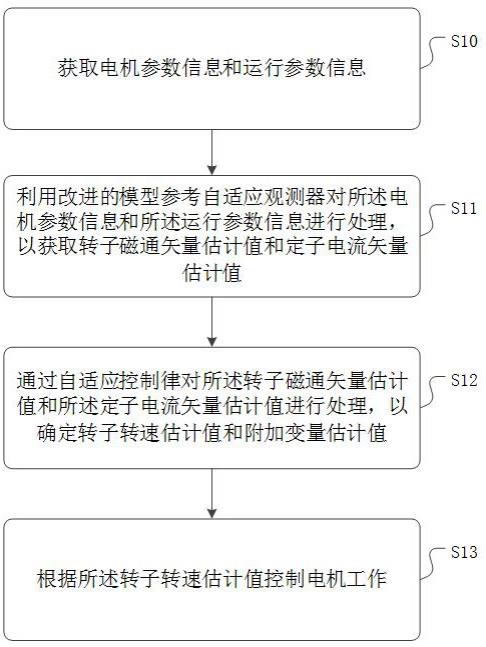
3、获取电机参数信息和运行参数信息;
4、利用改进的模型参考自适应观测器对所述电机参数信息和所述运行参数信息进行处理,以获取转子磁通矢量估计值和定子电流矢量估计值;其中,所述改进的模型参考自适应观测器为将辅助变量引入传统模型参考自适应观测器中得到的改进模型,所述辅助变量与所述转子磁通矢量估计值相关;
5、通过自适应控制律对所述转子磁通矢量估计值和所述定子电流矢量估计值进行处理,以确定转子转速估计值和附加变量估计值;其中,所述自适应控制律为根据李雅普诺夫函数稳定性确定的算法;
6、根据所述转子转速估计值控制电机工作。
7、优选的,所述通过自适应控制律对所述转子磁通矢量估计值和所述定子电流矢量估计值进行处理包括:
8、根据李雅普诺夫函数确定转子转速误差值和辅助变量误差量;
9、根据所述转子转速误差值和所述自适应控制律计算所述转子转速估计值,并根据所述辅助变量误差量和所述自适应控制律计算所述附加变量估计值。
10、优选的,所述根据李雅普诺夫函数确定转子转速误差值和辅助变量误差量包括:
11、根据所述定子电流矢量估计值确定定子电流误差值;
12、根据所述定子电流误差值和所述转子磁通矢量估计值确定所述转子转速误差值和辅助变量误差量。
13、优选的,所述改进的模型参考自适应观测器为在与转子磁链矢量同步旋转的坐标系统中的、使用感应电机自身作为参考的模型。
14、优选的,所述根据所述转子转速估计值控制电机工作的步骤后,还包括:
15、判断当前时间是否满足预设时间周期;
16、若满足所述预设时间周期,则进入所述利用改进的模型参考自适应观测器对所述电机参数信息和所述运行参数信息进行处理的步骤。
17、优选的,所述根据所述转子转速估计值控制电机工作包括:
18、根据所述转子转速估计值确定电机转矩;
19、根据所述转子转速估计值和所述电机转矩控制所述电机工作。
20、优选的,所述电机参数信息包括:定子电阻、转子电阻、定子自感、转子自感、互感、总漏磁系数和额定定子频率;
21、所述运行参数信息包括:定子电流矢量、定子电压矢量、同步速度、电机和负载转矩。
22、为了解决上述技术问题,本申请还提供了一种电机转速控制装置,包括:
23、第一获取单元,用于获取电机参数信息和运行参数信息;
24、第二获取单元,用于利用改进的模型参考自适应观测器对所述电机参数信息和所述运行参数信息进行处理,以获取转子磁通矢量估计值和定子电流矢量估计值;其中,所述改进的模型参考自适应观测器为将辅助变量引入传统模型参考自适应观测器中得到的改进模型,所述辅助变量与所述转子磁通矢量估计值相关;
25、确定单元,用于通过自适应控制律对所述转子磁通矢量估计值和所述定子电流矢量估计值进行处理,以确定转子转速估计值和附加变量估计值;其中,所述自适应控制律为根据李雅普诺夫函数稳定性确定的算法;
26、控制单元,用于根据所述转子转速估计值控制电机工作。
27、为了解决上述技术问题,本申请还提供了一种电机转速控制装置,包括存储器,用于存储计算机程序;
28、处理器,用于执行所述计算机程序时实现所述的电机转速控制方法的步骤。
29、为了解决上述技术问题,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述的电机转速控制方法的步骤。
30、本申请提供了一种电机转速控制方法,包括:获取电机参数信息和运行参数信息;利用改进的模型参考自适应观测器对电机参数信息和运行参数信息进行处理,以获取转子磁通矢量估计值和定子电流矢量估计值;其中,改进的模型参考自适应观测器为将辅助变量引入传统模型参考自适应观测器中得到的改进模型,辅助变量与转子磁通矢量估计值相关;通过自适应控制律对转子磁通矢量估计值和定子电流矢量估计值进行处理,以确定转子转速估计值和附加变量估计值;其中,自适应控制律为根据李雅普诺夫函数稳定性确定的算法;根据转子转速估计值控制电机工作。由此可见,本申请所提供的技术方案中,通过将与转子磁通矢量估计值相关的辅助变量引入传统模型参考自适应观测器中,以获取更优的速度观测模型,并利用自适应控制律对转子磁通矢量和定子电流矢量进行控制,从而保证电机低速运行时更准确的确定电机转速,以对电机进行控制,提高电机控制的稳定性和可靠性。
31、此外,本申请还提供了一种电机转速控制装置、介质,与上述方法对应,效果同上。
技术特征:
1.一种电机转速控制方法,其特征在于,包括:
2.根据权利要求1所述的电机转速控制方法,其特征在于,所述通过自适应控制律对所述转子磁通矢量估计值和所述定子电流矢量估计值进行处理包括:
3.根据权利要求2所述的电机转速控制方法,其特征在于,所述根据李雅普诺夫函数确定转子转速误差值和辅助变量误差量包括:
4.根据权利要求1所述的电机转速控制方法,其特征在于,所述改进的模型参考自适应观测器为在与转子磁链矢量同步旋转的坐标系统中的、使用感应电机自身作为参考的模型。
5.根据权利要求1所述的电机转速控制方法,其特征在于,所述根据所述转子转速估计值控制电机工作的步骤后,还包括:
6.根据权利要求1所述的电机转速控制方法,其特征在于,所述根据所述转子转速估计值控制电机工作包括:
7.根据权利要求1至6任一项所述的电机转速控制方法,其特征在于,所述电机参数信息包括:定子电阻、转子电阻、定子自感、转子自感、互感、总漏磁系数和额定定子频率;
8.一种电机转速控制装置,其特征在于,包括:
9.一种电机转速控制装置,其特征在于,包括存储器,用于存储计算机程序;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的电机转速控制方法的步骤。
技术总结
本申请涉及电机控制领域,公开了一种电机转速控制方法、装置、介质,包括:获取电机参数信息和运行参数信息;利用改进的模型参考自适应观测器处理电机参数信息和运行参数信息,以获取转子磁通矢量估计值、定子电流矢量估计值;通过自适应控制律对转子磁通矢量估计值和定子电流矢量估计值进行处理,以确定转子转速估计值和附加变量估计值。本申请通过将与转子磁通矢量估计值相关的辅助变量引入传统模型参考自适应观测器中,以获取更优的速度观测模型,并利用自适应控制律对转子磁通矢量和定子电流矢量进行控制,辅助变量与转子磁通矢量估计值相关,自适应控制律为根据李雅普诺夫函数稳定性确定的算法,从而对电机进行控制,提高稳定性和可靠性。
技术研发人员:付文轩,李伟,杨振,鄢鹏飞
受保护的技术使用者:浙江禾川科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!