改进机车整流器滑模控制的牵引供电低频振荡抑制方法
本发明涉及牵引供电,尤其涉及改进机车整流器滑模控制的牵引供电低频振荡抑制方法。
背景技术:
1、低频振荡给牵引供电系统的稳定运行带来了巨大挑战,其造成的过电压可能引发列车停运、安全设备误动作等事故,危害电气化铁路的正常运行。
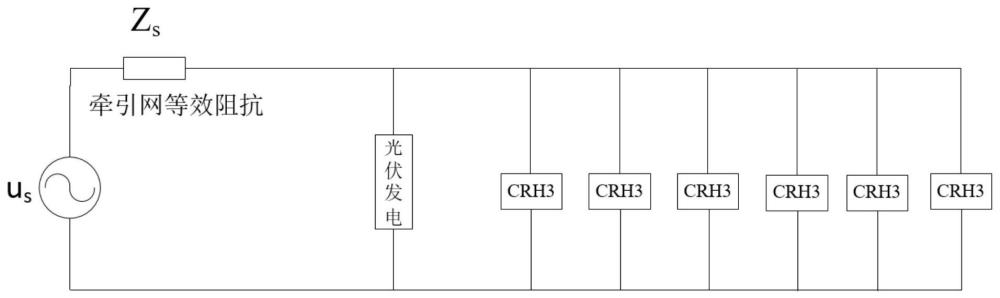
2、光伏引入牵引供电系统是研究新能源接入牵引供电系统安全运行的典型案例。目前许多专家学者针对牵引网低频振荡进行研究,普遍认为低频振荡是车网系统参数不匹配造成的。改变牵引网侧的参数有一定难度且不经济,因而改变动车组参数成为抑制低频振荡的主要手段。
3、瞬态电流控制是机车整流器的传统控制策略,它具有快速的响应能力且能够提高电动机的效率,但存有稳定性欠佳、易引发低频振荡的问题。滑模控制具有鲁棒性高、无超调量的特点,将其引入电流环控制器中,能有效地抑制低频振荡,然而传统滑模控制律所引发的抖振会导致直流侧电压幅值波动偏大,从而影响电网性能。
技术实现思路
1、本发明针对机车整流器现有滑模控制策略的不足,提出改进滑模控制方法,通过在电流环控制器引入平滑系数以降低系统抖振,经由遗传算法寻优切换面的速率以改进直流侧电压的稳态性能。
2、本发明所采用的技术方案是:改进机车整流器滑模控制的牵引供电低频振荡抑制方法包括以下步骤:
3、步骤一、构建含光伏牵引供电系统的数学模型及机车整流器dq数学模型;
4、进一步的,步骤一具体包括:
5、步骤11、设置整流器网侧交流电流,计算其在αβ坐标系中分量值;
6、步骤12、将αβ坐标系中分量值进行dq变换,得到对应d轴和q轴的网侧电流;
7、步骤13、根据基尔霍夫定律得到单相两电平整流器的数学模型;
8、步骤14、结合正交分量以及dq变换,得到整流器在dq变换下的状态方程。
9、步骤二、在dq坐标系下,选取机车整流器的输入单位功率因数和直流侧电压稳定作为控制目标,得到有功电流给定值,完成电压外环控制滑模面的求取;
10、进一步的,步骤二具体包括:
11、步骤21、构建直流侧输出电压滑模面和交流侧输入无功电流滑模面;
12、步骤22、计算dq坐标系下网侧电流得到有功电流给定值。
13、步骤三、将平滑系数引入基于双曲正切函数的指数趋近律;并采用遗传算法对切换面的速率进行寻优;将滑模面控制方程通过寻优后的双曲正切函数的指数趋近律与直流侧电压运算得到spwm控制电压,完成电流环控制律的求取;
14、进一步的,平滑系数引入基于双曲正切函数的指数趋近律的公式为:
15、
16、其中,α为运动点趋近于切换面的速率,β为平滑系数,α>0,k>0;k为控制律增益,s为电压滑模面,为电压滑模面趋近律。
17、进一步的,平滑系数β=0.5。
18、进一步的,遗传算法对切换面的速率进行寻优包括:
19、设置切换面的速率的范围和初始化遗传算法的遗传代数、变异和交叉概率参数;利用适应度评价函数对速率不断寻优,找到切换面的速率最优值。
20、最终,可得电流环滑模控制律为:
21、
22、其中,uwdref和uwqref分别是dq坐标系下网侧给定电压有功、无功分量;k1、k2分别是直流侧电压控制律增益和无功电流控制律增益;α为运动点趋近于切换面的速率,β为平滑系数;l为交流侧电感,ω是电流角频率,uwd和uwq分别是dq坐标系下网侧电压的有功、无功分量;iwd和iwq分别是dq坐标系下网侧电流的有功、无功分量;s1为直流侧输出电压滑模面,s2为交流侧输入无功电流滑模面。
23、进一步的,改进机车整流器滑模控制的牵引供电低频振荡抑制系统,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现改进机车整流器滑模控制的牵引供电低频振荡抑制方法。
24、进一步的,存储有计算机程序代码的计算机可读介质,计算机程序代码在由处理器执行时实现改进机车整流器滑模控制的牵引供电低频振荡抑制方法。
25、本发明的有益效果:
26、1、本发明在机车整流器的电流环控制器中,通过在基于双曲正切函数的指数趋近律中引入平滑系数,不仅保持了滑模控制鲁棒性高及无超调的特点,还有效地降低了系统抖振,相较于传统滑模控制具有更小的电压幅值波动;
27、2、本发明将指数趋近律中的切换面的速率经由遗传算法寻优以改进直流侧电压的稳态性能。
技术特征:
1.改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,步骤一具体包括:
3.根据权利要求1所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,步骤二具体包括:
4.根据权利要求1所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,平滑系数引入基于双曲正切函数的指数趋近律的公式为:
5.根据权利要求4所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,平滑系数β=0.5。
6.根据权利要求1所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,遗传算法对速率进行寻优包括:
7.根据权利要求1所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法,其特征在于,电流环控制律的公式为:
8.改进机车整流器滑模控制的牵引供电低频振荡抑制系统,其特征在于,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现如权利要求1-6任一项所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法。
9.存储有计算机程序代码的计算机可读介质,其特征在于,计算机程序代码在由处理器执行时实现如权利要求1-6任一项所述的改进机车整流器滑模控制的牵引供电低频振荡抑制方法。
技术总结
本发明涉及牵引供电技术领域,尤其涉及改进机车整流器滑模控制的牵引供电低频振荡抑制方法,包括构建含光伏牵引供电系统的数学模型及机车整流器dq数学模型;在dq坐标系下,选取机车整流器的输入单位功率因数和直流侧电压稳定作为控制目标,得到有功电流给定值;将平滑系数引入基于双曲正切函数的指数趋近律;并采用遗传算法对速率进行寻优;将滑模面控制方程通过寻优后的双曲正切函数的指数趋近律与直流侧电压运算得到SPWM控制电压。本发明针对机车整流器现有滑模控制策略的不足,提出改进滑模控制方法,通过在电流环控制器引入平滑系数以降低系统抖振,经由遗传算法寻优速率以改进直流侧电压的稳态性能。
技术研发人员:费克玲,孙旭明,张振中,陈顺芝
受保护的技术使用者:常州大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!