一种清扫机器人系统的制作方法
本发明涉及光伏电站,尤其涉及一种清扫机器人系统。
背景技术:
1、光伏电站全生命周期中,灰尘对发电量影响最大,远超过不当安装等引起的电量损失。通常太阳能资源较好的地区,风沙也较大,风沙对光伏组件的清洁度有重要影响,严重影响了发电量。
2、目前,现有技术中常规清扫机器人是由自身携带的锂电池给清扫机器人的电机供电,以驱动自身行走。锂电池的适宜工作环境温度为0~40℃,在极端工作环境下,无法保障清扫机器人的使用安全和性能。例如低于0℃后,锂电池性能会下降,放电能力极速降低;在高温环境下(如超过40℃),由于锂电池易燃而存在安全隐患。
3、因此,如何避免因锂电池供电导致的问题,以能够在温差较大地区为清扫机器人提供稳定电力,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种清扫机器人系统,以避免因锂电池供电导致的问题,能够在温差较大地区为清扫机器人提供稳定电力。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种清扫机器人系统,用于清扫光伏组件的光伏面板,包括清扫机器人和通电导轨;
4、所述通电导轨用于连接供电线路;
5、所述清扫机器人包括清扫机器人本体和接电装置,所述清扫机器人本体包括用电设备和接电装置,所述接电装置的一端与所述用电设备的电力输入端电气连接,另一端与所述通电导轨滑动配合,且电气连接。
6、可选地,在上述清扫机器人系统中,所述接电装置包括:
7、集电器,所述集电器与所述通电导轨滑动配合,且所述集电器的输入端与所述通电导轨电气连接,所述集电器的输出端与所述用电设备电气连接;
8、拨叉组件,一端固定于所述清扫机器人本体上,另一端与所述集电器固定连接。
9、可选地,在上述清扫机器人系统中,所述拨叉组件包括:
10、拨叉座,设置于所述清扫机器人本体上;
11、第一摆动部,第一端通过第一铰轴与所述拨叉座铰接,且所述第一摆动部和所述拨叉座之间设置有驱动所述第一摆动部绕所述第一铰轴向所述通电导轨的方向摆动的第一复位弹性件;
12、第二摆动部,第一端通过第二铰轴与所述第一摆动部的第二端铰接,所述集电器固定于所述第二摆动部的第二端,且所述第二摆动部和所述第一摆动部之间设置有驱动所述第二摆动部绕所述第二铰轴向所述通电导轨的方向摆动的第二复位弹性件。
13、可选地,在上述清扫机器人系统中,所述通电导轨包括:
14、滑动导管,所述滑动导管具有滑槽,所述集电器的输入端与所述滑槽滑动配合;
15、输电母线,设置于所述滑槽内,且与所述集电器的输入端电气接触。
16、可选地,在上述清扫机器人系统中,所述集电器上设置有与所述通电导轨接触的清洁刷。
17、可选地,在上述清扫机器人系统中,所述通电导轨设置于所述光伏面板一侧的下方,且通过吊架固定于所述光伏组件的支架上。
18、可选地,在上述清扫机器人系统中,所述接电装置包括:
19、导电滑块,所述导电滑块与所述通电导轨滑动配合,且电气连接,所述导电滑块通过输电电缆与所述用电设备电气连接;
20、柔性牵引装置,一端连接于所述清扫机器人本体上,另一端连接于所述导电滑块上。
21、可选地,在上述清扫机器人系统中,所述通电导轨为金属导轨,且为两条,其中一条所述通电导轨电气连接供电线路的火线,另一条所述通电导轨电气连接供电线路的零线;
22、所述接电装置为分别与两个所述通电导轨配合的两个。
23、可选地,在上述清扫机器人系统中,所述通电导轨包括导轨槽体以及由所述导轨槽体开口端向两侧延伸的外扩板;
24、所述导电滑块具有与所述外扩板滑动配合的导电滑槽。
25、可选地,在上述清扫机器人系统中,所述导电滑块上设置有避让槽,所述避让槽内设置有连接所述柔性牵引装置的连接轴,由所述避让槽的底壁至开口侧的方向上,所述避让槽位于所述连接轴两侧的两个侧壁之间的距离之间增大。
26、可选地,在上述清扫机器人系统中,两条所述通电导轨分别设置于所述光伏组件的两侧,两个所述接电装置分别连接于所述清扫机器人本体的两端;或者,
27、两条所述通电导轨设置于所述光伏组件的同一侧,且设置高度相同或不同。
28、可选地,在上述清扫机器人系统中,所述通电导轨通过开关电源与供电线路连接;
29、所述开关电源配置有时间继电器,所述时间继电器用于控制所述开关电源的打开时间。
30、本发明提供的清扫机器人系统,在光伏组件周围增加通电导轨,并将该通电导轨连接供电线路,使得该通电导轨带电。清扫机器人增加接电装置,并将接电装置的一端与用电设备电气连接,另一端与通电导轨滑动配合,且电气连接,从而使得通电导轨能够为用电设备供电。清扫机器人本体无需锂电池供电,因此可去掉锂电池,清扫机器人本体减少锂电池后,可降低重量,从而更方便清扫机器人本体在光伏组件上的行走。采用通电导轨为清扫机器人本体供电,供电条件更优越,可在温差较大地区为清扫机器人本体提供稳定电力,而且运维方便,减少了对电池的维护工作,同时也无需对电池进行充电,提高了运维效率。
技术特征:
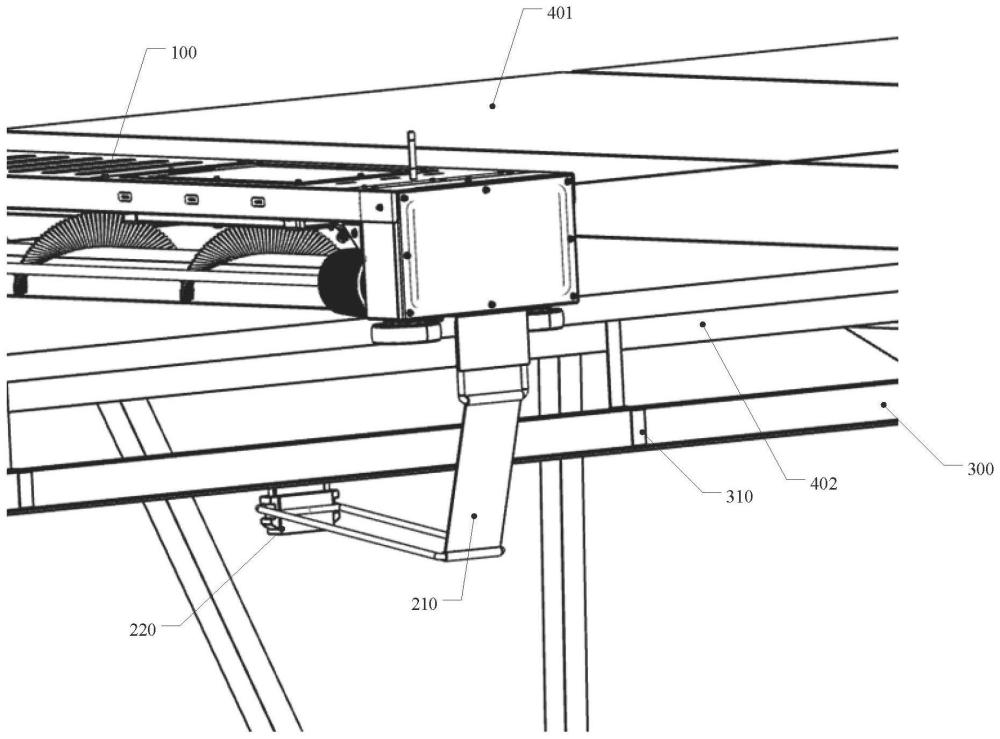
1.一种清扫机器人系统,用于清扫光伏组件(400)的光伏面板(401),其特征在于,包括清扫机器人和通电导轨(300);
2.根据权利要求1所述的清扫机器人系统,其特征在于,所述接电装置(200)包括:
3.根据权利要求2所述的清扫机器人系统,其特征在于,所述拨叉组件(210)包括:
4.根据权利要求2所述的清扫机器人系统,其特征在于,所述通电导轨(300)包括:
5.根据权利要求2所述的清扫机器人系统,其特征在于,所述集电器(220)上设置有与所述通电导轨(300)接触的清洁刷。
6.根据权利要求2所述的清扫机器人系统,其特征在于,所述通电导轨(300)设置于所述光伏面板(401)一侧的下方,且通过吊架(310)固定于所述光伏组件(400)的支架(402)上。
7.根据权利要求1所述的清扫机器人系统,其特征在于,所述接电装置(200)包括:
8.根据权利要求7所述的清扫机器人系统,其特征在于,所述通电导轨(300)为金属导轨,且为两条,其中一条所述通电导轨(300)电气连接供电线路的火线,另一条所述通电导轨(300)电气连接供电线路的零线;
9.根据权利要求7所述的清扫机器人系统,其特征在于,所述通电导轨(300)包括导轨槽体(302)以及由所述导轨槽体(302)开口端向两侧延伸的外扩板(301);
10.根据权利要求9所述的清扫机器人系统,其特征在于,所述导电滑块(250)上设置有避让槽(251),所述避让槽(251)内设置有连接所述柔性牵引装置(240)的连接轴(252),由所述避让槽(251)的底壁至开口侧的方向上,所述避让槽(251)位于所述连接轴(252)两侧的两个侧壁之间的距离之间增大。
11.根据权利要求8所述的清扫机器人系统,其特征在于,两条所述通电导轨(300)分别设置于所述光伏组件(400)的两侧,两个所述接电装置(200)分别连接于所述清扫机器人本体(100)的两端;或者,
12.根据权利要求1-11任一项所述的清扫机器人系统,其特征在于,所述通电导轨(300)通过开关电源与供电线路连接;
技术总结
本发明公开了一种清扫机器人系统,用于清扫光伏组件的光伏面板,包括清扫机器人和通电导轨;所述通电导轨用于连接供电线路;所述清扫机器人包括清扫机器人本体和接电装置,所述清扫机器人本体包括用电设备和接电装置,所述接电装置的一端与所述用电设备的电力输入端电气连接,另一端与所述通电导轨滑动配合,且电气连接。本发明采用通电导轨为清扫机器人本体供电,供电条件更优越,可在温差较大地区为清扫机器人本体提供稳定电力,而且运维方便,减少了对电池的维护工作,同时也无需对电池进行充电,提高了运维效率。
技术研发人员:左玖玲,朱宝红,陈世德,黄文俊,梁金年,徐雪松,程伟
受保护的技术使用者:哈密大南湖新能源有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!