电机控制系统、方法及投影设备与流程
本申请涉及电机控制,具体而言,涉及一种电机控制系统、方法及投影设备。
背景技术:
1、投屏技术广泛应用于商务、教育以及家庭影音等领域,给人们极大便利。随着投影设备的广泛使用,将电机控制与投影设备结合的产品越来越多。
2、目前,有很多电机控制技术对投影产品中的电机进行控制,例如细分电机步长进行控制、控制电机驱动电流、采用软件控制输入输出及采用单片机控制电机等。
3、但是,上述的现有方法实现的电机控制并不具备降噪功能,而过大噪音可能影响投影设备正常使用。
技术实现思路
1、本申请的目的在于,针对上述现有技术中的不足,提供一种电机控制系统、方法及投影设备,以解决现有技术中电机运行噪音过大的问题。
2、为实现上述目的,本申请采用的技术方案如下:
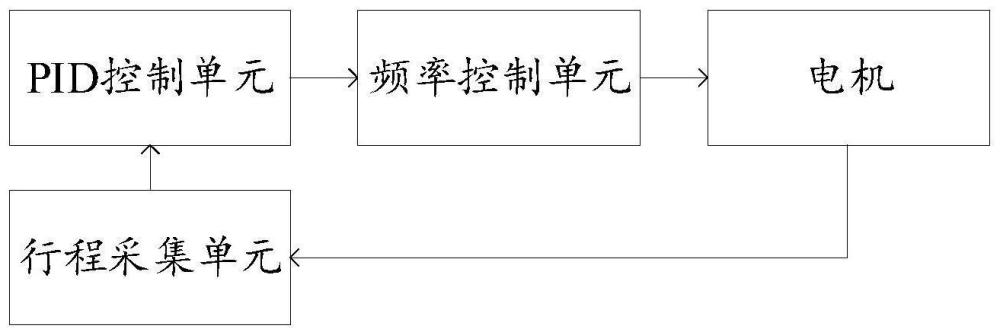
3、第一方面,本申请提供了一种电机控制系统,所述电机控制系统中包括:pid控制单元、频率控制单元、行程采集单元以及电机;
4、所述行程采集单元,用于采集所述电机的当前步数,根据所述当前步数确定所述电机的当前行程位置,并将所述当前行程位置发送给所述pid控制单元;
5、所述pid控制单元,用于根据所述电机的当前行程位置,确定待选频率,并将所述待选频率发送给所述频率控制单元;
6、所述频率控制单元,用于根据一个或多个预设噪音频率和所述待选频率,确定目标频率,并控制所述电机按照所述目标频率运行。
7、可选地,所述根据所述电机的当前行程位置,确定待选频率,包括:
8、根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率。
9、可选地,所述根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率,包括:
10、将所述当前行程位置和所述目标行程位置作为pid算法的当前轮的输入参数,基于所述pid算法,计算得到当前轮的待选频率。
11、可选地,所述频率控制单元包括谐振过滤单元,所述谐振过滤单元具体用于:
12、若所述待选频率存在于所述多个预设噪音频率中,则筛除所述待选频率,并将上一周期的目标频率作为目标频率;
13、若所述待选频率不存在于所述多个预设噪音频率中,则将所述待选频率作为目标频率。
14、可选地,所述频率控制单元还包括pwm单元,所述pwm单元具体用于:
15、基于所述目标频率向所述电机发射pwm信号,使所述电机基于所述pwm信号运行。
16、第二方面,本申请提供一种电机控制方法,应用于电机控制系统,所述电机控制系统中包括:pid控制单元、频率控制单元、行程采集单元以及电机;所述方法包括:
17、所述行程采集控制单元采集所述电机的当前步数,根据所述当前步数确定所述电机的当前行程位置,并将所述当前行程位置发送给所述pid控制单元;
18、所述pid控制单元根据所述电机的当前行程位置,确定待选频率,并将所述待选频率发送给所述频率控制单元;
19、所述频率控制单元根据预先测试得到的多个预设噪音频率和所述待选频率,确定目标频率;
20、所述频率控制单元控制所述电机按照所述目标频率运行。
21、可选地,所述根据所述电机的当前行程位置,确定待选频率,包括:
22、根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率。
23、可选地,所述根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率,包括:
24、将所述当前行程位置和所述目标行程位置作为pid算法的当前轮的输入参数,基于所述pid算法,计算得到当前轮的待选频率。
25、可选地,所述根据预先测试得到的多个预设噪音频率和所述待选频率,确定目标频率,包括:
26、若所述待选频率存在于所述多个预设噪音频率中,则筛除所述待选频率,并将上一周期的目标频率作为目标频率;
27、若所述待选频率不存在于所述多个预设噪音频率中,则将所述待选频率作为目标频率。
28、第三方面,本申请提供了一种电机控制装置,所述装置包括:
29、行程采集模块,用于采集所述电机的当前步数,根据所述当前步数确定所述电机的当前行程位置,并将所述当前行程位置发送给所述pid控制单元;
30、pid控制模块,用于根据所述电机的当前行程位置,确定待选频率,并将所述待选频率发送给所述频率控制单元;
31、频率控制模块,用于根据一个或多个预设噪音频率和所述待选频率,确定目标频率,并控制所述电机按照所述目标频率运行。
32、可选地,所述pid控制模块具体用于:
33、根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率。
34、可选地,所述pid控制模块具体还用于:
35、将所述当前行程位置和所述目标行程位置作为pid算法的当前轮的输入参数,基于所述pid算法,计算得到当前轮的待选频率。
36、可选地,所述频率控制模块包括谐振过滤模块,所述谐振过滤模块具体用于:
37、若所述待选频率存在于所述多个预设噪音频率中,则筛除所述待选频率,并将上一周期的目标频率作为目标频率;
38、若所述待选频率不存在于所述多个预设噪音频率中,则将所述待选频率作为目标频率。
39、可选地,所述频率控制模块还包括pwm模块,所述pwm模块具体用于:
40、基于所述目标频率向所述电机发射pwm信号,使所述电机基于所述pwm信号运行。
41、第四方面,本申请提供一种投影设备,所述投影设备上部署有如第一方面所述的电机控制系统。
42、本申请的有益效果是:行程采集单元采集当前电机步数并计算得到当前行程位置,将行程位置发送给pid控制单元。通过行程采集单元根据电机步数确定电机当前行程,相较于使用编码器统计电机步数来说,能降低制造成本,避免因为编码器结果复杂所造成的设备故障。pid控制单元根据电机的当前行程位置确定待选频率,并将待选频率发送给频率控制单元,从而使电机的转动速度可以基于当前行程位置进行调整,实现闭环控制。频率控制单元根据一个或多个预设噪音频率和待选频率,确定目标频率,并控制电机按照目标频率运行,从而使电机可以在低噪音状态下运行,保证投影设备的正常运行。
技术特征:
1.一种电机控制系统,其特征在于,所述电机控制系统中包括:pid控制单元、频率控制单元、行程采集单元以及电机;
2.根据权利要求1所述的系统,其特征在于,所述根据所述电机的当前行程位置,确定待选频率,包括:
3.根据权利要求2所述的系统,其特征在于,所述根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率,包括:
4.根据权利要求1所述的系统,其特征在于,所述频率控制单元包括谐振过滤单元,所述谐振过滤单元具体用于:
5.根据权利要求1所述的系统,其特征在于,所述频率控制单元包括pwm单元,所述pwm单元具体用于:
6.一种电机控制方法,其特征在于,应用于电机控制系统,所述电机控制系统中包括:pid控制单元、频率控制单元、行程采集单元以及电机;所述方法包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述电机的当前行程位置,确定待选频率,包括:
8.根据权利要求7所述的方法,其特征在于,所述根据当前行程位置和目标行程位置,确定所述电机的位置误差,并根据所述位置误差确定待选频率,包括:
9.根据权利要求6所述的方法,其特征在于,所述根据预先测试得到的多个预设噪音频率和所述待选频率,确定目标频率,包括:
10.一种投影设备,其特征在于,所述投影设备上部署有权利要求1-5任一项所述的电机控制系统。
技术总结
本申请提供了一种电机控制系统、方法及投影设备,其中电机控制系统中包括PID控制单元、频率控制单元、行程采集单元以及电机,行程采集单元用于采集电机的当前步数,根据当前步数确定电机的当前行程位置并发送给PID控制单元,PID控制单元用于根据电机的当前行程位置,确定待选频率,并将待选频率发送给频率控制单元,频率控制单元用于根据一个或多个预设噪音频率和待选频率,确定目标频率,并控制电机按照目标频率运行。本申请通过频率控制单元筛选待选频率,确定目标频率,从而使电机在低噪音状态下运行,避免影响投影设备的正常使用。
技术研发人员:洪德胜
受保护的技术使用者:深圳市极米软件科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!