呼吸机涡轮电机的控制方法及系统与流程
本申请涉及呼吸机,具体而言,涉及一种呼吸机涡轮电机的控制方法及系统。
背景技术:
1、在现代临床医学中,呼吸机作为一项能人工替代自主通气功能的有效手段,已普遍用于治疗患者的阻塞性睡眠呼吸暂停及慢性阻塞性肺疾病(copd),在现代医学领域内占有十分重要的位置。
2、呼吸机在正常运行的过程中,需要涡轮电机给呼吸机提供空气,呼吸机中的涡轮电机中存在霍尔传感器,在驱动涡轮电机时,通常通过霍尔传感器检测到的角度进行六步换向控制或者磁场定向控制。然而,这种方式需要应用三个霍尔传感器,这会导致涡轮电机在换向时存在转矩脉动,从而引入不必要的震动和噪音。此外,这种涡轮驱动方式十分依赖于霍尔信号,在实际应用中,由于外界干扰,霍尔信号上可能存在着噪声,容易导致涡电机轮换向失败从而引起涡轮电机停转甚至损坏。
技术实现思路
1、为了至少克服现有技术中的上述不足,本申请的目的在于提供一种呼吸机涡轮电机的控制方法及系统。
2、第一方面,本申请实施例提供一种呼吸机涡轮电机的控制方法,所述呼吸机涡轮电机的控制方法包括:
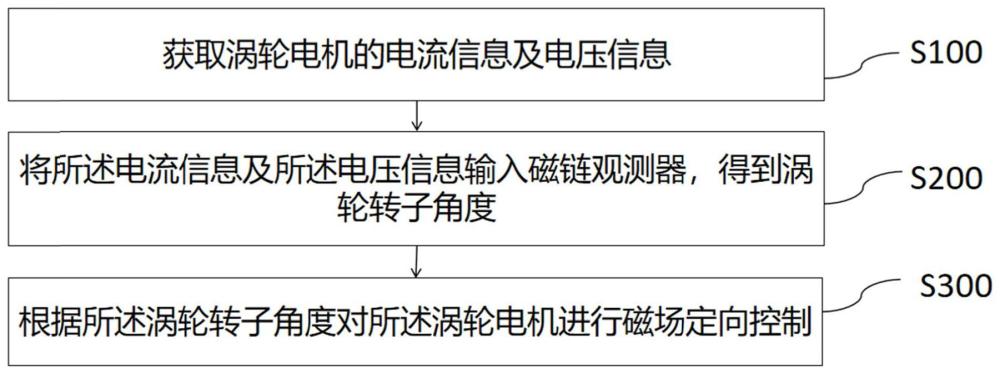
3、获取涡轮电机的电流信息及电压信息;
4、将所述电流信息及所述电压信息输入磁链观测器,得到涡轮转子角度;
5、根据所述涡轮转子角度对所述涡轮电机进行磁场定向控制。
6、在一种可能的实现方式中,所述将所述电流信息及所述电压信息输入磁链观测器,得到涡轮转子角度的步骤,包括:
7、根据所述涡轮电机的基本结构和工作原理,在静止坐标系下建立所述涡轮电机的数学模型;
8、根据所述数学模型,构建所述磁链观测器的状态空间方程;
9、根据所述状态空间方程计算得到所述涡轮转子角度。
10、在一种可能的实现方式中,在静止坐标系下建立所述涡轮电机的数学模型为:
11、
12、
13、其中,iαβ表示定子电流,iαβ=[iα,iβ]t,vαβ表示相电压,vαβ=[vα,vβ]t,θ表示角度,ω表示电转速,rs表示定子电阻,l表示定子电感,ψm表示永磁体的磁链,te表示电磁转矩,p表示电机极数。
14、在一种可能的实现方式中,所述根据所述数学模型,构建所述磁链观测器的状态空间方程的步骤,包括:
15、定义新的状态变量,简化所述数学模型,得到简化后的状态空间模型;
16、定义向量函数,并根据所述向量函数构建所述磁链观测器的状态空间方程。
17、在一种可能的实现方式中,简化后的状态空间模型为:
18、
19、其中,表示x的一阶导数,x表示新的状态向量,y≡-rsiαβ+vαβ,iαβ表示定子电流,iαβ=[iα,iβ]t,θ表示角度,ω表示电转速,l表示定子电感,ψm表示永磁体的磁链;
20、所述磁链观测器的状态空间方程为:
21、
22、其中,表示观测器的状态变量,γ表示观测器的增益,表示和半径为ψm的圆之间的距离的平方,表示向量函数。
23、在一种可能的实现方式中,所述根据所述状态空间方程计算得到所述涡轮转子角度的步骤,包括:
24、通过反正切函数或锁相环计算得到所述涡轮转子角度的估计值。
25、在一种可能的实现方式中,所述通过反正切函数计算得到所述涡轮转子角度的估计值的步骤,包括:
26、通过反正切函数计算得到所述涡轮转子角度的估计值;
27、根据所述涡轮转子角度的估计值,计算得到目标转速;
28、所述根据所述涡轮转子角度对所述涡轮电机进行磁场定向控制的步骤,包括:
29、根据所述涡轮转子角度以及所述目标转速对所述涡轮电机进行磁场定向控制。
30、在一种可能的实现方式中,所述涡轮转子角度的估计值通过以下计算方式得到:
31、
32、其中,状态变量iα、iβ表示定子电流,l表示定子电感。
33、在一种可能的实现方式中,所述通过锁相环计算得到所述涡轮转子角度的估计值的步骤,包括:
34、通过锁相环计算得到所述涡轮转子角度的估计值以及所述目标转速;
35、所述根据所述涡轮转子角度对所述涡轮电机进行磁场定向控制的步骤,包括:
36、根据所述涡轮转子角度以及所述目标转速对所述涡轮电机进行磁场定向控制。
37、第二方面,本申请实施例还提供一种呼吸机涡轮电机的控制系统,包括上述第一方面所述的呼吸机涡轮电机的控制方法。
38、基于上述任意一个方面,本申请实施例提供的呼吸机涡轮电机的控制方法及系统,可以通过磁链观测器计算涡轮转子角度,从而根据涡轮转子角度对涡轮电机进行磁场定向控制,实现对涡轮电机的精准驱动和控制,提高涡轮电机的性能和稳定性。通过使用磁链观测器,在低转速下具有良好的收敛特性,且涡轮电机启动时无需定位和开环,可直接闭环启动,减少了涡轮电机的启动时间,并且提高了启动可靠性。
技术特征:
1.一种呼吸机涡轮电机的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的呼吸机涡轮电机的控制方法,其特征在于,所述将所述电流信息及所述电压信息输入磁链观测器,得到涡轮转子角度的步骤,包括:
3.根据权利要求2所述的呼吸机涡轮电机的控制方法,其特征在于,在静止坐标系下建立所述涡轮电机的数学模型为:
4.根据权利要求2所述的呼吸机涡轮电机的控制方法,其特征在于,所述根据所述数学模型,构建所述磁链观测器的状态空间方程的步骤,包括:
5.根据权利要求4所述的呼吸机涡轮电机的控制方法,其特征在于,简化后的状态空间模型为:
6.根据权利要求2所述的呼吸机涡轮电机的控制方法,其特征在于,所述根据所述状态空间方程计算得到所述涡轮转子角度的步骤,包括:
7.根据权利要求6所述的呼吸机涡轮电机的控制方法,其特征在于,所述通过反正切函数计算得到所述涡轮转子角度的估计值的步骤,包括:
8.根据权利要求7所述的呼吸机涡轮电机的控制方法,其特征在于,所述涡轮转子角度的估计值通过以下计算方式得到:
9.根据权利要求6所述的呼吸机涡轮电机的控制方法,其特征在于,所述通过锁相环计算得到所述涡轮转子角度的估计值的步骤,包括:
10.一种呼吸机涡轮电机的控制系统,其特征在于,包括权利要求1-9任意一项所述的呼吸机涡轮电机的控制方法。
技术总结
本申请提供一种呼吸机涡轮电机的控制方法及系统,涉及呼吸机技术领域。所述呼吸机涡轮电机的控制方法包括:获取涡轮电机的电流信息及电压信息;将电流信息及电压信息输入磁链观测器,得到涡轮转子角度;根据涡轮转子角度对涡轮电机进行磁场定向控制,实现对涡轮电机的精准驱动和控制,提高涡轮电机的性能和稳定性。通过使用磁链观测器,在低转速下具有良好的收敛特性,且涡轮电机启动时无需定位和开环,可直接闭环启动,减少了涡轮电机的启动时间,并且提高了启动可靠性。
技术研发人员:刘宽,祝荣荣
受保护的技术使用者:深圳融昕医疗科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!