用于工业机器人的集成式伺服驱动器的制作方法
本申请涉及工业自动化设备,尤其涉及一种用于工业机器人的集成式伺服驱动器。
背景技术:
1、随着工业机器人技术的快速发展,与之配套使用的伺服驱动器也在不断向小型化、低成本和高可靠性等方向改进,以满足对伺服驱动器不断增长的要求。
2、相关技术中,在通过伺服驱动器对工业机器人的伺服电机进行驱动时,一般存在两大类方案。第一是独立驱动方案,即为工业机器人的每个关节电机单独适配一台伺服驱动器。第二是模块化方案,即通过结构化设计,使多个模块可共用一部分结构或组件,根据需求拼接而成驱动器。
3、然而,在实际应用中,上述第一种驱动方案的设备数量较多,硬件成本较高,占用空间大,且接线繁多。上述第二种方案中各个模块之间的连接比较复杂,共用的整流模块会存在过多的冗余设计,同样增加了成本和体积,且对机器人控制的同步性较差。
技术实现思路
1、本申请的目的旨在至少在一定程度上解决上述的技术问题之一。
2、为此,本申请的第一个目的在于提出一种用于工业机器人的集成式伺服驱动器。该伺服驱动器具有较高的集成度,简化了内部的组件数量和连接关系,降低了伺服驱动器的体积和成本,提高了对工业机器人控制的同步性。
3、本申请的第一个目的在于提出一种电子设备。
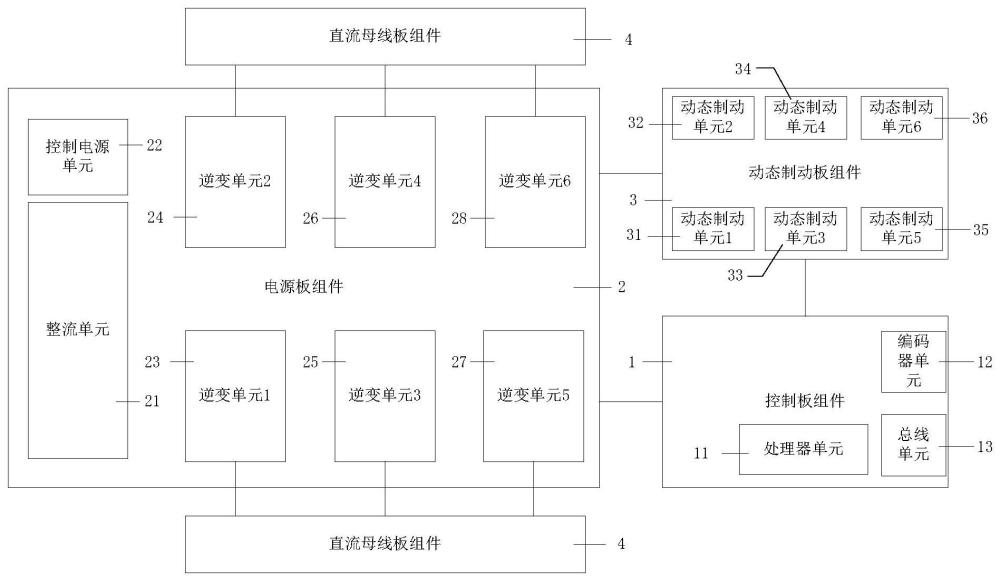
4、为达上述目的,本申请第一方面提出了一种用于工业机器人的集成式伺服驱动器,该伺服驱动器包括:控制板组件、电源板组件、动态制动板组件和直流母线板组件,其中,
5、所述电源板组件设置在最底层,所述直流母线板组件设置在所述电源板组件之上,所述动态制动板组件设置在所述直流母线板组件之上,所述控制板组件通过连接组件穿过所述动态制动板组件与所述电源板组件相连;
6、所述控制板组件中的每个单元由对应的一个核心芯片构成,所述控制板组件,用于通过单芯片处理器对工业机器人的六个轴关节处的伺服电机进行同步控制,并控制所述电源板组件和所述动态制动板组件实现相关的功能;
7、所述电源板组件,用于将外部输入的电压转换为伺服驱动器中各个组件所需的电压,以向所述伺服驱动器供电,并向各个伺服电机提供所需的电能;
8、所述动态制动板组件,用于在工业机器人发生异常时,启动动态制动功能消耗制动能量;
9、所述直流母线板组件,用于向所述电源板组件和所述动态制动板组件中的相关单元提供直流母线电压。
10、另外,本申请实施例的用于工业机器人的集成式伺服驱动器还具有如下附加的技术特征:
11、可选地,在一些实施例中,所述控制板组件,包括:处理器单元、编码器单元和总线单元,其中,所述处理器单元包括嵌入式微控制器芯片,所述嵌入式微控制器芯片用于同时控制所述工业机器人的六个轴关节处的伺服电机的同步动作;所述编码器单元包括可编程逻辑芯片和六组采样电路,所述六组采样电路用于实时读取工业机器人的六个机械臂轴关节处的位置信息,所述可编程逻辑芯片用于对所述位置信息进行采样处理和滤波处理;所述总线单元包括协议栈芯片,所述协议栈芯片用于与上位机进行通信,解析并传输上位机传输的控制指令。
12、可选地,在一些实施例中,所述电源板组件,包括:整流单元、控制电源单元和六个逆变单元,其中,所述整流单元,用于将外部输入的三相交流电压转换为直流母线电压;所述控制电源单元,用于将外部输入的预设电压隔离转换为所述伺服驱动器中各个组件运行所需的低电压;所述六个逆变单元,用于将所述直流母线电压转换为各个伺服电机所需的三相交流电压。
13、可选地,在一些实施例中,根据所述工业机器人的六个轴关节的功率减小特性分配所述六个逆变单元的功率,所述六个逆变单元中大功率的逆变单元设置在所述电源板组件的中间区域。
14、可选地,在一些实施例中,所述动态制动板组件,包括:六组动态制动单元,各组所述动态制动单元分别对应一个所述逆变单元,所述六组动态制动单元的功率基于所述六个逆变单元的功率分配特征进行相应分配。
15、可选地,在一些实施例中,每个所述动态制动单元,包括:二极管、继电器和制动电阻,其中,第一动态制动单元、第三动态制动单元和第五动态制动单元共用一个制动电阻;第二动态制动单元、第四动态制动单元和第六动态制动单元共用一个制动电阻;每个所述制动电阻布置于所述电源板组件下方的散热器的顶面。
16、可选地,在一些实施例中,所述直流母线板组件包括:第一直流母线电路板和第二直流母线电路板,所述直流母线板组件用于实现所述六个逆变单元的共母线。
17、可选地,在一些实施例中,所述第一直流母线电路板,用于将所述整流单元输出的所述直流母线电压跨接到第三逆变单元和第五逆变单元;所述第二直流母线电路板,用于将所述整流单元输出的所述直流母线电压跨接到第四逆变单元和第六逆变单元。
18、可选地,在一些实施例中,所述控制板组件,具体用于:基于与所述电源板组件的连接,向所述六个逆变单元和所述整流单元发送电压转换控制信号,并获取所述控制电源单元输出的控制电压;基于与所述动态制动板组件的连接,向所述动态制动板组件发送动态制动控制指令。
19、为达上述目的,本申请第二方面提出了一种电子设备,包括如上述第一方面中任一项所述的用于工业机器人的集成式伺服驱动器。
20、本申请的实施例提供的技术方案至少带来以下有益效果:
21、本申请基于工业机器人的工作特性和所应用的具体场景,针对性的提出一种高度集成的多合一伺服驱动器,由控制板组件、电源板组件、动态制动板组件和直流母线板组件组成。该伺服驱动器的组件种类较少,集成度较高,各个组件采用叠层设计的布置方式,能够充分合理的利用空间,从结构上、功能上和控制上极大地集成,通过简化各组件的连接关系减少了配线,从而本申请减少了伺服驱动器的体积和硬件成本。并且,本申请根据工业机器人的功率分配特点合理分配相关单元的功率,采用单一的处理器对多台伺服电机的动作进行同步控制,控制的同步性和实时性较高,提高了对工业机器人控制的性能。
22、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种用于工业机器人的集成式伺服驱动器,其特征在于,包括:控制板组件、电源板组件、动态制动板组件和直流母线板组件,其中,
2.根据权利要求1所述的集成式伺服驱动器,其特征在于,所述控制板组件,包括:处理器单元、编码器单元和总线单元,其中,
3.根据权利要求1所述的集成式伺服驱动器,其特征在于,所述电源板组件,包括:整流单元、控制电源单元和六个逆变单元,其中,
4.根据权利要求3所述的集成式伺服驱动器,其特征在于,根据所述工业机器人的六个轴关节的功率减小特性分配所述六个逆变单元的功率,所述六个逆变单元中大功率的逆变单元设置在所述电源板组件的中间区域。
5.根据权利要求4所述的集成式伺服驱动器,其特征在于,所述动态制动板组件,包括:
6.根据权利要求5所述的集成式伺服驱动器,其特征在于,每个所述动态制动单元,包括:二极管、继电器和制动电阻,其中,
7.根据权利要求3所述的集成式伺服驱动器,其特征在于,所述直流母线板组件包括:第一直流母线电路板和第二直流母线电路板,所述直流母线板组件用于实现所述六个逆变单元的共母线。
8.根据权利要求7所述的集成式伺服驱动器,其特征在于,所述第一直流母线电路板,用于将所述整流单元输出的所述直流母线电压跨接到第三逆变单元和第五逆变单元;所述第二直流母线电路板,用于将所述整流单元输出的所述直流母线电压跨接到第四逆变单元和第六逆变单元。
9.根据权利要求3所述的集成式伺服驱动器,其特征在于,所述控制板组件,具体用于:
10.一种电子设备,其特征在于,包括如权利要求1-9中任一项所述的用于工业机器人的集成式伺服驱动器。
技术总结
本申请公开了一种用于工业机器人的集成式伺服驱动器,包括:控制板组件、电源板组件、动态制动板组件和直流母线板组件,各个组件按照顺序依次叠层布置;控制板组件,用于通过单芯片处理器对工业机器人的六个轴关节处的伺服电机进行同步控制,并控制电源板组件和动态制动板组件实现相关的功能;电源板组件,用于将外部输入的电压进行转换后,向伺服驱动器和各个伺服电机供电;动态制动板组件,用于在发生异常时,启动动态制动功能消耗制动能量;直流母线板组件,用于向电源板组件和动态制动板组件中的相关单元提供直流母线电压。该伺服驱动器具有较高的集成度,减少了体积和成本,提高了对工业机器人控制的同步性。
技术研发人员:曹双强,李小会
受保护的技术使用者:北京凯恩帝自动化科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!