本申请属于矢量控制,具体涉及一种基于旋转变压器的永磁同步电机矢量控制算法。
背景技术:
1、在机载,弹载等多种设备中,相对于传统的直流无刷电机,永磁同步电机可以让电机的转矩更平滑,转矩波纹很小,动态响应快等诸多优点,可以满足高精度、快速且平稳运行的要求,永磁同步电机矢量控制算法显的尤为重要,从民用控制领域到国防控制领域,都得到了广泛的应用。由于永磁同步电机的结构特点,在其控制中广泛采用矢量控制的方法,永磁同步电机矢量控制方法有很多,有的不需要传感器,采用估算法获得位置信息,但是这样不太稳定。
2、因此,需要提供一种相对于现有技术而言,更加安全可靠的永磁同步电机的矢量控制算法。
技术实现思路
1、本申请的目的在于提供一种基于旋转变压器的永磁同步电机矢量控制算法,用于控制精度高,动态响应快,转矩波纹很小的控制等领域。
2、为了实现上述目的,本申请提供了如下技术方案,提供一种基于旋转变压器的永磁同步电机矢量控制算法,所述算法包括:
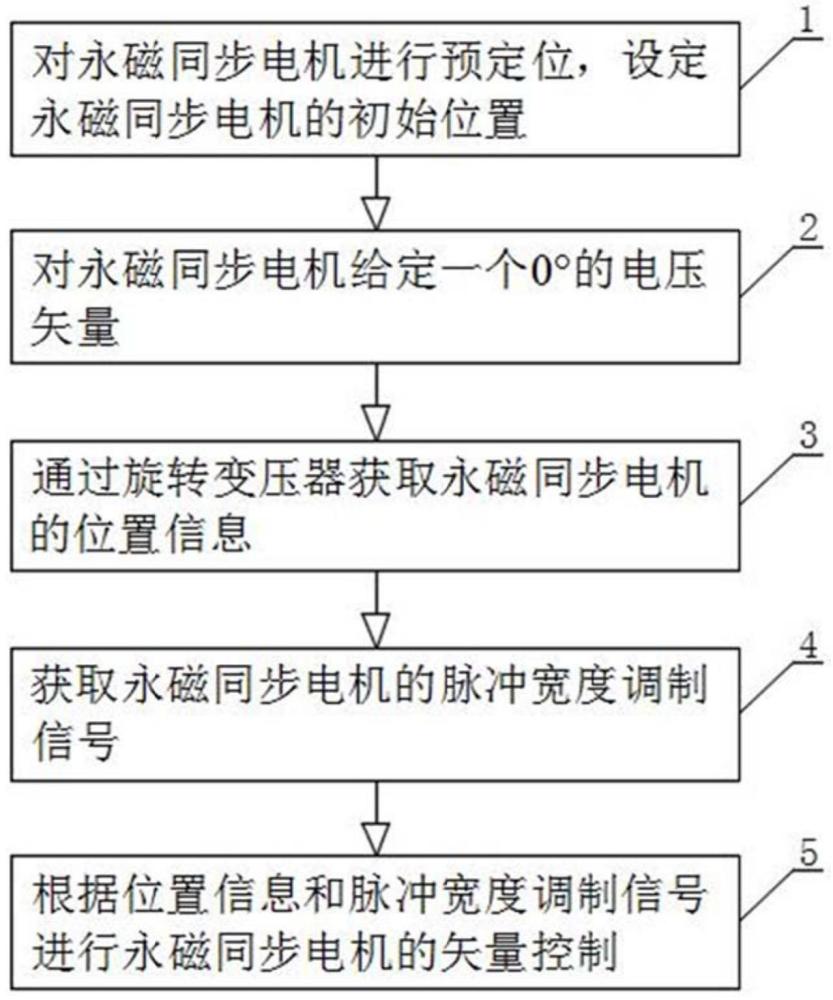
3、对永磁同步电机进行预定位,设定永磁同步电机的初始位置;
4、对永磁同步电机给定一个0°的电压矢量;
5、通过旋转变压器获取永磁同步电机的位置信息;
6、获取永磁同步电机的脉冲宽度调制信号;
7、根据位置信息和脉冲宽度调制信号进行永磁同步电机的矢量控制。
8、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述位置信息包括实时速度和实时电角度。
9、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述通过旋转变压器获取永磁同步电机的位置信息包括:
10、将旋转变压器安装在永磁同步电机的轴上,使所述旋转变压器和所述永磁同步电机同轴运行;
11、获取旋转变压器的正弦和余弦的两路差分信号;
12、对两路差分信号通过解码芯片解码,得到永磁同步电机的位置信息。
13、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述解码芯片采用16位解码芯片。
14、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述获取永磁同步电机的脉冲宽度调制信号包括:
15、采集三相正弦电流信息,并对其进行滤波;
16、由滤波后的三相对称正弦电流信息经c l arke变换得到两相静止坐标系的电流信息;
17、由永磁同步电机的两相静止坐标系的电流信息经park变换得到随磁场旋转的d-p轴坐标系的电流信息;
18、根据d-p轴坐标系的电流信息以及设定的永磁同步电机的电流参考值生成脉冲宽度调制信号。
19、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述采集三相正弦电流信息,并对其进行滤波还包括在滤波前对三相正弦电流信息进行预处理,所述预处理为用当前采集的三相正弦电流信息减去静态三相正弦电流信息。
20、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述d-p轴坐标系的电流信息包括交轴实际电流值和直轴实际电流值,所述永磁同步电机的电流参考值包括交轴电流参考值和直轴设定电流值,
21、则,所述根据d-p轴坐标系的电流信息以及设定的永磁同步电机的电流参考值生成脉冲宽度调制信号包括:
22、根据所述永磁同步电机的交轴电流参考值和交轴实际电流值,确定永磁同步电机的交轴控制量;
23、根据所述永磁同步电机的直轴设定电流值和直轴实际电流值,确定永磁同步电机的直轴控制量;
24、根据所述永磁同步电机的交轴控制量和所述永磁同步电机的直轴控制量确定永磁同步电机的最终控制量;
25、根据所述永磁同步电机的最终控制量,生成所述脉冲宽度调制信号。
26、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述根据位置信息和d-p轴坐标系电流信息进行永磁同步电机的矢量控制包括:
27、基础矢量与磁链轨迹的合成:控制三相逆变器的六个功率管随时间变化的pwm波,模拟三相对称正弦电流的电压矢量圆,获得的磁链轨迹;
28、确定矢量作用扇区:根据旋转变压器获得的实时电角度确定扇区;
29、确定矢量作用时间:根据旋转变压器获得的空间角度确定相邻基础矢量的作用时间;
30、计算调制方式:根据矢量作用扇区和矢量作用时间确定相应矢量作用扇区的开关切换顺序,所述开关切换顺序包括七段波形,六次切换;
31、计算pwm占空比:根据七段式调制方式,两个基础矢量和两个零矢量对称作用,计数器的值小于ccr值时,输出无效电平,反之输出有效电平,根据矢量作用扇区的确定值,确定电机三相输出顺序。
32、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,所述扇区分为六个,所述第一扇区其中uα和uβ分别为第一扇区非零矢量,在α-β两相静止坐标系上的垂直分量,其中uα是垂直α轴的分量,其中uβ是垂直β轴的分量。
33、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,还具有这样的特征,零矢量的作用时间为
34、其中,t4是基础矢量u0(100)的作用时间,t6是基础矢量u60(110)的作用时间,t0和t7分别为两个零矢量uz(000)uz(111)的作用时间。
35、有益效果
36、本申请所提供的基于旋转变压器的永磁同步电机矢量控制算法,比较简单,容易实现,且位置和速度采用旋转变压器采集,位置更加精确,使永磁同步电机运行更加平稳。
技术特征:1.一种基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述算法包括:
2.根据权利要求1所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述位置信息包括实时速度和实时电角度。
3.根据权利要求2所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述通过旋转变压器获取永磁同步电机的位置信息包括:
4.根据权利要求3所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述解码芯片采用16位解码芯片。
5.根据权利要求1所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述获取永磁同步电机的脉冲宽度调制信号包括:
6.根据权利要求5所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述采集三相正弦电流信息,并对其进行滤波还包括在滤波前对三相正弦电流信息进行预处理,所述预处理为用当前采集的三相正弦电流信息减去静态三相正弦电流信息。
7.根据权利要求5所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述d-p轴坐标系的电流信息包括交轴实际电流值和直轴实际电流值,所述永磁同步电机的电流参考值包括交轴电流参考值和直轴设定电流值,
8.根据权利要求1所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述根据位置信息和d-p轴坐标系电流信息进行永磁同步电机的矢量控制包括:
9.根据权利要求8所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,所述扇区分为六个,所述第一扇区其中uα和uβ分别为第一扇区非零矢量,在α-β两相静止坐标系上的垂直分量,uα是垂直α轴的分量,其中uβ是垂直β轴的分量。
10.根据权利要求8所述的基于旋转变压器的永磁同步电机矢量控制算法,其特征在于,零矢量的作用时间为
技术总结本申请提供了一种基于旋转变压器的永磁同步电机矢量控制算法,属于矢量控制技术领域,所述算法包括:对永磁同步电机进行预定位,设定永磁同步电机的初始位置;对永磁同步电机给定一个0°的电压矢量;通过旋转变压器获取永磁同步电机的位置信息;获取永磁同步电机的脉冲宽度调制信号;根据位置信息和脉冲宽度调制信号进行永磁同步电机的矢量控制。本申请所提供的一种基于旋转变压器的永磁同步电机矢量控制算法,比较简单,容易实现,且位置和速度采用旋转变压器采集,位置更加精确,使永磁同步电机运行更加平稳。
技术研发人员:崔永胜,王祯,贾志强
受保护的技术使用者:兰州飞行控制有限责任公司
技术研发日:技术公布日:2024/4/17