用于伺服控制器的制动电路的制作方法
本技术涉及电子电力,尤其涉及一种用于伺服控制器的制动电路。
背景技术:
1、伺服控制器是一种电子设备,用于控制伺服电机的运动和位置,在工业生产中起到位置控制、速度控制、扭矩控制的功能,由于伺服运动场合一般为较高速场合,在电机启停和运行期间会将母线电压抬升。
2、要实现伺服控制器高精度、快响应等特性,制动电路必不可少。现有技术的制动电路存在结构复杂,运行长久后制定不稳定,模块容易损坏等问题。
技术实现思路
1、为了克服现有技术的不足,本实用新型的目的在于提供一种用于伺服控制器的制动电路,其电路结构简单合理,具有制动稳定、工作稳定、模块寿命长等优点。
2、本实用新型的目的采用如下技术方案实现:
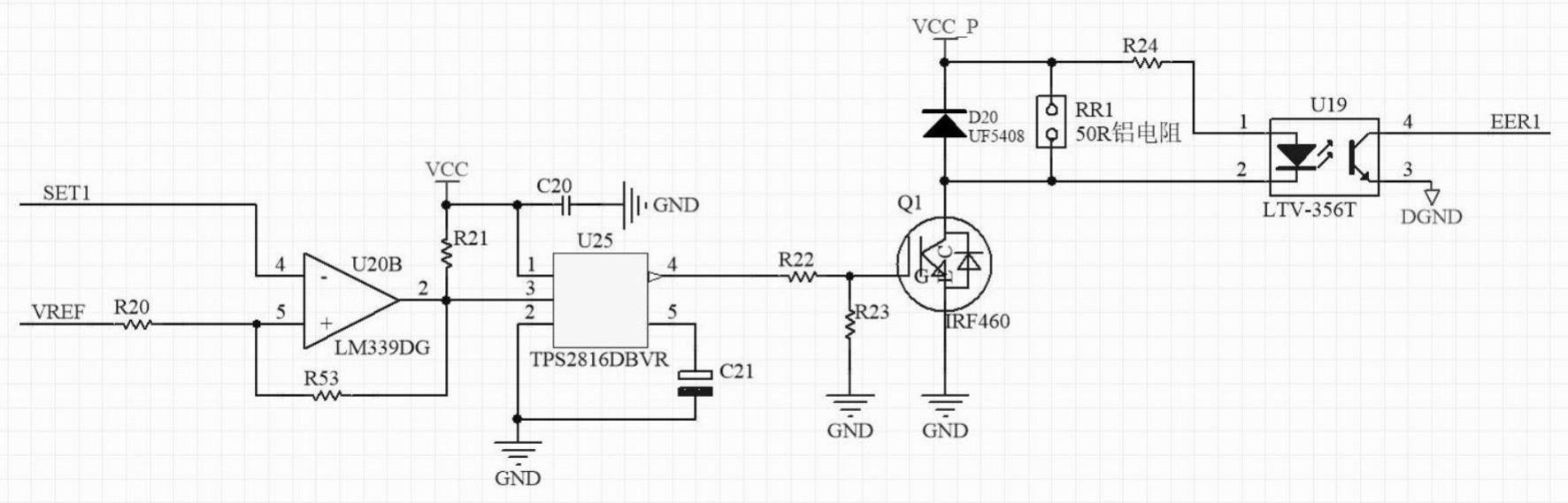
3、一种用于伺服控制器的制动电路,包括比较器、隔离式栅极驱动器、mos管、铝电阻和光耦;所述比较器的正相输入端连接基准电压,反相输入端连接母线取样电压,所述比较器的信号输出端与隔离式栅极驱动器的输入端连接,所述隔离式栅极驱动器的输出端与mos管的栅极连接,所述mos管的源极接地,所述铝电阻的一端与母线电压连接,另一端与mos管的漏极连接,所述光耦的发射端的正极与母线电压连接,所述光耦的发射端的负极与mos管的漏极连接。
4、进一步地,所述制动电路还包括有续流二极管,所述续流二极管与铝电阻并联,并且续流二极管的正极与mos管的漏极连接,负极与母线电压连接。
5、进一步地,所述光耦的接收端的c极输出cpu检测信号,e极连接dgnd。
6、进一步地,所述制动电路还包括第一电阻、第二电阻和第三电阻,所述第一电阻连接比较器的正相输入端,所述第二电阻的一端连接比较器的正相输入端,另一端连接比较器的信号输出端,所述第三电阻的一端连接供电电压,另一端连接比较器的信号输出端。
7、进一步地,所述制动电路还包括电解电容,所述隔离式栅极驱动器的vdd端连接供电电压,所述隔离式栅极驱动器的vcc端与电解电容的正极连接,所述电解电容的负极接地。
8、相比现有技术,本实用新型的有益效果在于:
9、本实用新型所提供的用于伺服控制器的制动电路,其电路结构简单合理,具有制动稳定、工作稳定、模块寿命长等优点。
技术特征:
1.一种用于伺服控制器的制动电路,其特征在于:包括比较器、隔离式栅极驱动器、mos管、铝电阻和光耦;所述比较器的正相输入端连接基准电压,反相输入端连接母线取样电压,所述比较器的信号输出端与隔离式栅极驱动器的输入端连接,所述隔离式栅极驱动器的输出端与mos管的栅极连接,所述mos管的源极接地,所述铝电阻的一端与母线电压连接,另一端与mos管的漏极连接,所述光耦的发射端的正极与母线电压连接,所述光耦的发射端的负极与mos管的漏极连接。
2.如权利要求1所述的制动电路,其特征在于:所述制动电路还包括有续流二极管,所述续流二极管与铝电阻并联,并且续流二极管的正极与mos管的漏极连接,负极与母线电压连接。
3.如权利要求1所述的制动电路,其特征在于:所述光耦的接收端的c极输出cpu检测信号,e极连接dgnd。
4.如权利要求1所述的制动电路,其特征在于:所述制动电路还包括第一电阻、第二电阻和第三电阻,所述第一电阻连接比较器的正相输入端,所述第二电阻的一端连接比较器的正相输入端,另一端连接比较器的信号输出端,所述第三电阻的一端连接供电电压,另一端连接比较器的信号输出端。
5.如权利要求1所述的制动电路,其特征在于:所述制动电路还包括电解电容,所述隔离式栅极驱动器的vdd端连接供电电压,所述隔离式栅极驱动器的vcc端与电解电容的正极连接,所述电解电容的负极接地。
技术总结
本技术公开了一种用于伺服控制器的制动电路,包括比较器、隔离式栅极驱动器、MOS管、铝电阻和光耦;比较器的正相输入端连接基准电压,反相输入端连接母线取样电压,比较器的信号输出端与隔离式栅极驱动器的输入端连接,隔离式栅极驱动器的输出端与MOS管的栅极连接,MOS管的源极接地,铝电阻的一端与母线电压连接,另一端与MOS管的漏极连接,光耦的发射端的正极与母线电压连接,光耦的发射端的负极与MOS管的漏极连接。该制动电路的结构设计简单合理,具有制动稳定、工作稳定、模块寿命长等优点。
技术研发人员:魏勇
受保护的技术使用者:广州台茳电气技术有限公司
技术研发日:20230509
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!