一种巡检高压线机器人的制作方法
本技术涉及巡检机器人,特别涉及一种巡检高压线机器人。
背景技术:
1、电力线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪烙、材料老化的影响而容易产生断股、磨损、腐蚀等损伤,如不及时修复更换,原本微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积的停电和巨大的经济损失。
2、公告号为cn208571433u的一种高压线巡检机器人,属于高压线巡检的机器人技术领域。包括支撑架,支撑架的上端面设置至少三对伸缩杆,伸缩杆靠近端部设有第一伺服电机,第一伺服电机的输出轴轴线与伸缩杆轴线垂直,第一伺服电机的输出轴设有第一支架,第一支架的端部设有第二伺服电机,第二伺服电机的输出轴设有第二支架,第二支架的端部设有第三伺服电机,第三伺服电机的输出轴设有u型滚轮,支撑架下端面设有相对的第一凸台和第二凸台,第一凸台和第二凸台穿设有丝杆,控制箱上设有与丝杆相配合的螺纹,控制箱置于丝杆中部,第一伸缩杆、第二伸缩杆和第三伸缩杆依次翻越障碍物,个装置完成翻越障碍物。
3、上述的一种高压线巡查机器人,虽能够做到使得装置完成翻越障碍物,但上述的装置在使用时,只能够对高压线进行巡查检测后,如高压线上存在杂物和污垢,无法很好的对他进行很好的清理,针对此问题可以进行改进。
技术实现思路
1、本实用新型的目的在于,提供一种巡检高压线机器人,能够解决部分装置在使用,只能够对高压线进行巡查检测后,如高压线上存在杂物和污垢,无法很好的对他进行很好的清理的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种巡检高压线机器人,包括:
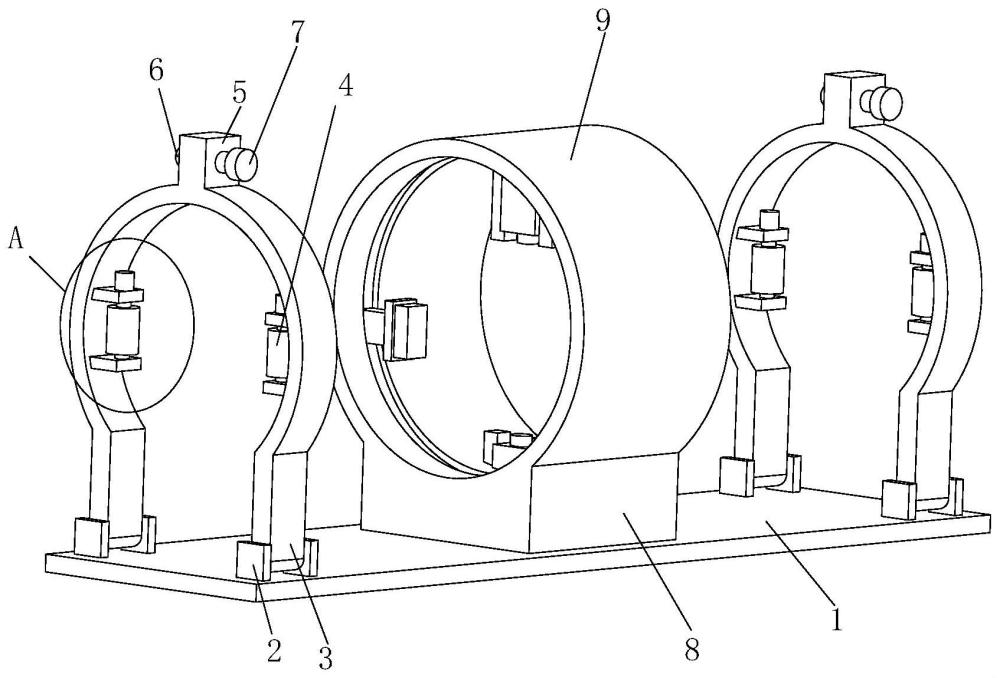
3、横板,横板的顶部固定安装有八组安装板且呈矩形分布,安装板之间转动安装有限位架;
4、驱动机构,设置于限位架上,包括有安装横板、转动杆、驱动轮和驱动电机,用于通过控制驱动电机启动从而带动驱动轮进行转动。
5、优选的,所述限位架上固定安装有两组安装横板且呈上下分布,安装横板之间转动安装有转动杆,转动杆上固定安装有驱动轮,安装横板的顶部固定安装有驱动电机,驱动电机的输出端穿过安装横板与转动杆固定连接,用于带动装置进行移动。
6、优选的,所述限位架的顶部固定安装有固定块,固定块上开设有固定螺纹槽,固定块的内部螺纹安装有固定螺丝,固定螺丝的一端固定安装有旋钮,用于带动装置进行悬挂。
7、优选的,所述横板的顶部固定安装有安装块,安装块的顶部固定安装有安装环。
8、优选的,所述安装环的内部固定安装有两组检测相机且呈上下分布,检测相机的两侧固定安装有补光灯,用于对电线进行检测。
9、优选的,所述安装环的内部开设有电动滑轨,电动滑轨的内部滑动安装有电动滑块。
10、优选的,所述电动滑块的一侧固定安装有连接杆,连接杆的一端固定安装有连接板,连接板的右侧固定安装有清理毛刷。
11、与现有技术相比,本实用新型的有益效果是:
12、(1)、该巡检高压线机器人,通过安装板、限位架、安装横板、转动杆、驱动轮、驱动电机、固定块、固定螺丝和旋钮的组合使用,使得该装置能够通过将装置套设与电线上,通过转动限位架从而使得两组限位架闭合,通过往固定块上开设的固定螺纹槽内螺纹安装有固定螺丝从而对装置进行固定,从而将装置悬挂与电线上,通过控制驱动电机启动,从而带动转动杆转动,通过转动杆的转动从而带动驱动轮进行转动,通过驱动轮的设置,进而带动装置在电线上移动,进而使得装置能够更好的检测高压线,提高了装置的实用性。
13、(2)、该巡检高压线机器人,通过安装块、安装环、检测相机、补光灯、电动滑轨、电动滑块、连接杆、连接板和清理毛刷的组合使用,使得该装置能够通过检测相机的设置从而对电线进行检测,通过控制补光灯启动,从而对电线进行补光,使得该装置能够更好的进行检测,通过控制电动滑轨和电动滑块的启动,使得电动滑块能够在电动滑轨的内部进行滑动,进而带动连接杆进行移动,通过连接杆的移动带动清理毛刷进行移动,进而对电线进行初步的清理,从而防止电线上存在杂物,进而影响电线的正常运作,提高了装置的实用性。
技术特征:
1.一种巡检高压线机器人,其特征在于,包括:
2.根据权利要求1所述的一种巡检高压线机器人,其特征在于:所述限位架(3)上固定安装有两组安装横板(401)且呈上下分布,安装横板(401)之间转动安装有转动杆(402),转动杆(402)上固定安装有驱动轮(403),安装横板(401)的顶部固定安装有驱动电机(404),驱动电机(404)的输出端穿过安装横板(401)与转动杆(402)固定连接。
3.根据权利要求2所述的一种巡检高压线机器人,其特征在于:所述限位架(3)的顶部固定安装有固定块(5),固定块(5)上开设有固定螺纹槽,固定块(5)的内部螺纹安装有固定螺丝(6),固定螺丝(6)的一端固定安装有旋钮(7)。
4.根据权利要求3所述的一种巡检高压线机器人,其特征在于:所述横板(1)的顶部固定安装有安装块(8),安装块(8)的顶部固定安装有安装环(9)。
5.根据权利要求4所述的一种巡检高压线机器人,其特征在于:所述安装环(9)的内部固定安装有两组检测相机(10)且呈上下分布,检测相机(10)的两侧固定安装有补光灯(11)。
6.根据权利要求5所述的一种巡检高压线机器人,其特征在于:所述安装环(9)的内部开设有电动滑轨(12),电动滑轨(12)的内部滑动安装有电动滑块(13)。
7.根据权利要求6所述的一种巡检高压线机器人,其特征在于:所述电动滑块(13)的一侧固定安装有连接杆(14),连接杆(14)的一端固定安装有连接板(15),连接板(15)的右侧固定安装有清理毛刷(16)。
技术总结
本技术公开了一种巡检高压线机器人,涉及巡检机器人技术领域。该巡检高压线机器人,包括横板和驱动机构,横板的顶部固定安装有八组安装板且呈矩形分布,安装板之间转动安装有限位架,驱动机构设置于限位架上,包括有安装横板、转动杆、驱动轮和驱动电机,用于通过控制驱动电机启动从而带动驱动轮进行转动,通过检测相机的设置从而对电线进行检测,通过控制补光灯启动,从而对电线进行补光,使得该装置能够更好的进行检测,通过控制电动滑轨和电动滑块的启动,使得电动滑块能够在电动滑轨的内部进行滑动,进而带动连接杆进行移动,通过连接杆的移动带动清理毛刷进行移动,进而对电线进行初步的清理。
技术研发人员:刘开生,刘胜锋,陈崇,肖瑶,杨景云,汪俊仪
受保护的技术使用者:重庆市经贸中等专业学校
技术研发日:20230713
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!