自动跟随移位系统的制作方法
本技术涉及康复训练设备领域,尤其涉及一种自动跟随移位系统。
背景技术:
1、天轨康复训练移位系统主要是针对需要早期进行康复训练又不能负重下地的患者,在训练过程中给予减重免荷和保护的功能,让患者能够在安全的状态下尽早开始康复训练,能够有效避免运动系统、消化系统、呼吸系统等身体机能的下降,防止并发症发生,也能够促进原有病症的快速康复,对于受损功能可以有效的进行针对性训练,提高康复效果。天轨康复训练移位系统主要包括天轨轨道和电动移位机,移位机在天轨轨道上移动,移位机连接有吊带,通过吊带对患者进行辅助训练,可以帮助患者行走或者,或者对患者进行移动。
2、然而,现有产品的电动移位机都是以按钮式操作移动,虽说能防跌倒,也不需要专人扶持,但还是需要医疗人员一对一辅助操作电动移位机以帮助康复人员进行术后康复,这种做法需要人为去判断电动移位机与训练人员的相对位置,从而手动去修正其位置,无疑是浪费人力和时间。
技术实现思路
1、为了克服现有技术的不足,本实用新型的目的在于提供一种自动跟随移位系统,用于实现移位机自动跟随患者移动的功能,无需医疗人员一对一辅助操作移位机,节省人力和时间。
2、本实用新型的目的采用如下技术方案实现:
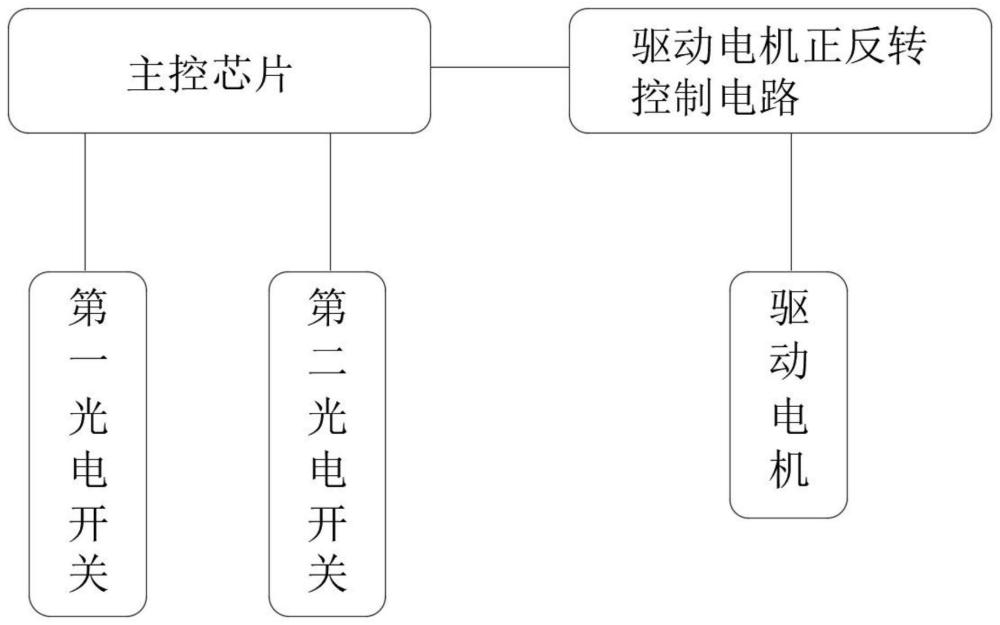
3、一种自动跟随移位系统,包括主控芯片、驱动电机正反转控制电路、第一光电开关和第二光电开关,所述第一光电开关和所述第二光电开关分别与主控芯片连接,所述驱动电机正反转控制电路包括第一继电器、第二继电器、第一三极管和第二三极管,所述第一继电器的线圈端和所述第二继电器的线圈端分别连接工作电压,所述第一三极管的基极连接主控芯片的一路移位信号,集电极连接第一继电器的线圈端,发射极连接gnd,所述第二三极管的基极连接主控芯片的另一路移位信号,集电极连接第二继电器的线圈端,发射极连接gnd,所述第一继电器的触点端和所述第二继电器的触点端分别处于驱动电机的两路驱动电路上,且这两路驱动电路的电流方向相反。
4、进一步地,所述第一光电开关的发射管连接工作电压,接收管的发射极为信号反馈端,并且与第一电阻和主控芯片连接;所述第二光电开关的发射管连接工作电压,接收管的发射极为信号反馈端,并且与第二电阻和主控芯片连接。
5、进一步地,所述第一继电器的触点端包括第一公共触点、第一常开触点和第一常闭触点,所述第一常开触点连接电机驱动电压,第一常闭触点连接gnd。
6、进一步地,所述第二继电器的触点端包括第二公共触点、第二常开触点和第二常闭触点,所述第二常开触点连接电机驱动电压,第二常闭触点连接gnd。
7、进一步地,所述第一公共触点和所述第二公共触点分别连接驱动电机的正极和负极。
8、进一步地,所述主控芯片采用stm32f103rct6。
9、进一步地,所述自动跟随移位系统还包括有移位机和吊带组件,所述驱动电机用于驱动所述移位机;所述移位机上设置有跟随块,由吊带组件带动跟随块前后往复移动,所述第一光电开关和所述第二光电开关分别用于检测跟随块是否前移和后移。
10、进一步地,所述跟随块上设置有带孔,所述带孔为通孔,所述吊带从带孔中穿过并与跟随块接触。
11、相比现有技术,本实用新型的有益效果在于:
12、本实用新型所提供的自动跟随移位系统,包括主控芯片、驱动电机正反转控制电路、第一光电开关和第二光电开关;该自动跟随移位系统用于实现移位机自动跟随患者移动的功能,无需医疗人员一对一辅助操作移位机,节省人力和时间。
技术特征:
1.一种自动跟随移位系统,其特征在于,包括主控芯片、驱动电机正反转控制电路、第一光电开关和第二光电开关,所述第一光电开关和所述第二光电开关分别与主控芯片连接,所述驱动电机正反转控制电路包括第一继电器、第二继电器、第一三极管和第二三极管,所述第一继电器的线圈端和所述第二继电器的线圈端分别连接工作电压,所述第一三极管的基极连接主控芯片的一路移位信号,集电极连接第一继电器的线圈端,发射极连接gnd,所述第二三极管的基极连接主控芯片的另一路移位信号,集电极连接第二继电器的线圈端,发射极连接gnd,所述第一继电器的触点端和所述第二继电器的触点端分别处于驱动电机的两路驱动电路上,且这两路驱动电路的电流方向相反。
2.如权利要求1所述的自动跟随移位系统,其特征在于,所述第一光电开关的发射管连接工作电压,接收管的发射极为信号反馈端,并且与第一电阻和主控芯片连接;所述第二光电开关的发射管连接工作电压,接收管的发射极为信号反馈端,并且与第二电阻和主控芯片连接。
3.如权利要求1所述的自动跟随移位系统,其特征在于,所述第一继电器的触点端包括第一公共触点、第一常开触点和第一常闭触点,所述第一常开触点连接电机驱动电压,第一常闭触点连接gnd。
4.如权利要求3所述的自动跟随移位系统,其特征在于,所述第二继电器的触点端包括第二公共触点、第二常开触点和第二常闭触点,所述第二常开触点连接电机驱动电压,第二常闭触点连接gnd。
5.如权利要求4所述的自动跟随移位系统,其特征在于,所述第一公共触点和所述第二公共触点分别连接驱动电机的正极和负极。
6.如权利要求1所述的自动跟随移位系统,其特征在于,所述主控芯片采用stm32f103rct6。
7.如权利要求1-6任一项所述的自动跟随移位系统,其特征在于,所述自动跟随移位系统还包括有移位机和吊带组件,所述驱动电机用于驱动所述移位机;所述移位机上设置有跟随块,由吊带组件带动跟随块前后往复移动,所述第一光电开关和所述第二光电开关分别用于检测跟随块是否前移和后移。
8.如权利要求7所述的自动跟随移位系统,其特征在于,所述跟随块上设置有带孔,所述带孔为通孔,所述吊带从带孔中穿过并与跟随块接触。
技术总结
本技术公开了一种自动跟随移位系统,包括主控芯片、驱动电机正反转控制电路、第一光电开关和第二光电开关,第一光电开关和第二光电开关分别与主控芯片连接,驱动电机正反转控制电路包括第一继电器、第二继电器、第一三极管和第二三极管,第一三极管的基极连接主控芯片的一路移位信号,集电极连接第一继电器的线圈端,第二三极管的基极连接主控芯片的另一路移位信号,集电极连接第二继电器的线圈端,第一继电器的触点端和第二继电器的触点端分别处于驱动电机的两路驱动电路上,且这两路驱动电路的电流方向相反。该自动跟随移位系统用于实现移位机自动跟随患者移动的功能,无需医疗人员一对一辅助操作移位机,节省人力和时间。
技术研发人员:刘锦杨,邓仲臣,黄子雄
受保护的技术使用者:广州人来康复设备制造有限公司
技术研发日:20230804
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!