具有无线充电功能的移动机器人的制作方法
本技术涉及机器人,尤其涉及一种具有无线充电功能的移动机器人。
背景技术:
1、电能是移动机器人工作中最常见的一种能量来源,一般使用线缆或触点为移动机器人补充电能。目前已应用的有直插式充电、触点连接充电,磁吸式充电等方式,其均需要移动机器人通过物理连接,利用金属插头或触点直接接触形成闭合回路进行充电。上述充电方式在面对潮湿环境时,金属插头或触点容易锈蚀,导致接触不良,影响充电效率,且存在安全隐患;在面对雨雪、烟尘等环境时,还容易出现杂质、灰尘附着在金属连接器表面;而且金属连接器使用较长时间后还容易出现表面磨损等情况,影响充电效率。
2、为应对各种复杂的使用环境,现有技术中出现了无线充电的供能方式,即在充电器端设置一组无线充电发射模块,移动机器人端设置一组无线充电接收模块,通过无线充电发射模块发射能量和无线充电接收模块接收能量,从而实现对移动机器人的无线充电。
3、无线充电功能依赖于无线充电发射模块与无线充电接收模块的距离及垂直方向上的重合度,过远或者过偏都会影响无线充电的效率。现有移动机器人中的无线充电接收模块,主要依赖于外部的辅助定位来判断自身位置,在使用过程中容易出现位置对不准,导致传输效率低以及空载等情况。而且,现有无线充电接收模块与机器人机身的连接方式,通常采用多个螺钉进行连接,这导致其安装和拆卸流程繁琐,拆装效率低,遇到震动时还会发生螺钉松脱的风险。
4、因此,亟需一种具有无线充电功能的移动机器人,以解决上述技术问题。
技术实现思路
1、基于以上所述,本实用新型的目的在于提供一种具有无线充电功能的移动机器人,能实现无线充电接收模块相对于无线充电发射模块的准确定位,且无线充电接收模块安装方便、拆装效率高。
2、为达上述目的,本实用新型采用以下技术方案:
3、具有无线充电功能的移动机器人,包括:
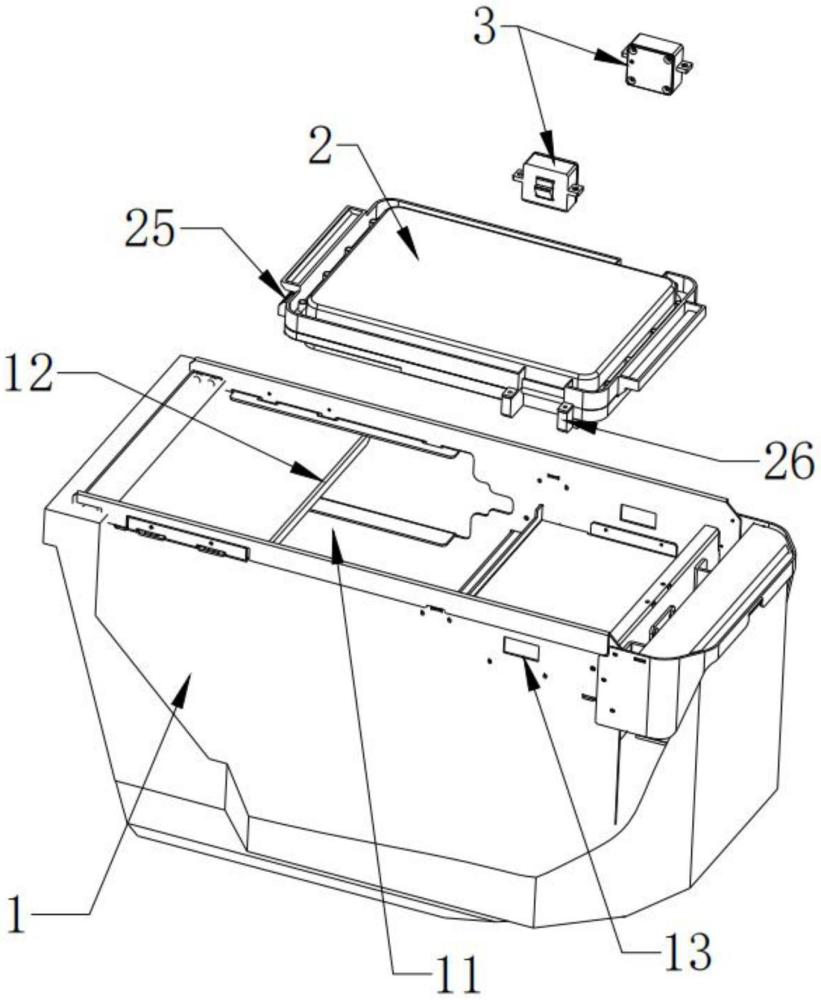
4、机身,所述机身的底部设有容纳腔,所述容纳腔的一端设有第一限位部,所述容纳腔的两侧设有卡接孔;
5、无线充电接收模块,安装于所述容纳腔内,所述无线充电接收模块包括外壳及设于所述外壳内的感应线圈、电路板和线圈定位传感器;所述外壳的一端设有用于与所述第一限位部配合的第二限位部;所述感应线圈用于与电源端的发射线圈相互感应,以对所述移动机器人的电池充电;所述线圈定位传感器用于检测所述无线充电接收模块相对于所述电源端的位置;
6、锁扣组件,固定于所述外壳的两侧,用于与所述容纳腔两侧的所述卡接孔弹性卡接。
7、在一些可能的实施方式中,所述电源端设有标记线圈,所述线圈定位传感器包括一对电感,一对所述电感能检测所述标记线圈的磁场变化,以确定所述无线充电接收模块相对于所述电源端的位置。
8、在一些可能的实施方式中,所述外壳包括相互连接的上壳和下壳,所述上壳和所述下壳的其中之一为塑料材质,其中另一为金属材质。
9、在一些可能的实施方式中,所述上壳和所述下壳之间通过密封圈或密封条密封。
10、在一些可能的实施方式中,所述第一限位部和所述第二限位部的其中之一为限位凸台,其中另一为限位槽,所述限位凸台插接嵌合于所述限位槽内。
11、在一些可能的实施方式中,所述锁扣组件包括底座、罩壳、锁舌和弹性件,所述罩壳固定连接于所述底座,所述罩壳上开设有通孔,所述锁舌滑动安装于所述罩壳内,所述锁舌设有能穿过所述通孔的卡接部;所述弹性件设置于所述底座和所述锁舌之间,所述弹性件能使所述卡接部伸出所述通孔,以与所述卡接孔相卡接。
12、在一些可能的实施方式中,所述弹性件为弹簧,所述底座设置有导向柱,所述弹簧套设于所述导向柱。
13、在一些可能的实施方式中,所述罩壳的侧壁和所述锁舌二者中的一个设置有导向台,另一个设置有导向槽,所述导向台滑动连接于所述导向槽。
14、在一些可能的实施方式中,所述外壳的两侧设有固定台,所述罩壳上设有凸耳,所述罩壳通过所述凸耳与所述固定台连接。
15、在一些可能的实施方式中,所述凸耳卡接、粘接或通过紧固件连接于所述固定台。
16、本实用新型的有益效果为:
17、本实用新型在机身底部安装有无线充电接收模块,可以方便地停留在无线充电区域内进行充电,相比于传统的触点连接,本实用新型无需与供电模块接触即可进行充电,避免了因锈蚀、灰尘、脏污、以及磨损所带来的接触不良等问题;与直插式充电相比,由于没有插头的存在,本实用新型不需要人工干预,移动机器人可通过停留在指定位置进行充电,省去了人工插入充电接头的步骤,更加方便。
18、本实用新型通过线圈定位传感器检测电源端的磁场变化,能判断无线充电接收模块相对于电源端的距离和角度,从而识别出移动机器人是否进入充电区域,进而确定是否启动或者关闭移动机器人的感应线圈。本实用新型解决了无线充电接收模块在使用过程中容易出现位置对不准,导致传输效率低以及空载的问题;该无线充电接收模块集成了定位功能和无线充电接收功能,集成度高,结构紧凑,安装方便。
19、本实用新型的无线充电接收模块与机身安装时,首先通过第一限位部和第二限位部的配合进行限位,然后通过锁扣组件与卡接孔的卡接,实现无线充电接收模块与机身的锁定,完成二者的快速安装,提高了安装效率,同时也方便后续的拆卸检查和维修。相比于传统采用多颗螺钉的锁紧方式,本实用新型安装、拆卸步骤少,拆装效率高,避免了震动时发生螺钉松脱的现象。
技术特征:
1.具有无线充电功能的移动机器人,其特征在于,包括:
2.根据权利要求1所述的具有无线充电功能的移动机器人,其特征在于,所述电源端设有标记线圈,所述线圈定位传感器(24)包括一对电感,一对所述电感能检测所述标记线圈的磁场变化,以确定所述无线充电接收模块(2)相对于所述电源端的位置。
3.根据权利要求1所述的具有无线充电功能的移动机器人,其特征在于,所述外壳(21)包括相互连接的上壳(211)和下壳(212),所述上壳(211)和所述下壳(212)的其中之一为塑料材质,其中另一为金属材质。
4.根据权利要求3所述的具有无线充电功能的移动机器人,其特征在于,所述上壳(211)和所述下壳(212)之间通过密封圈或密封条密封。
5.根据权利要求1所述的具有无线充电功能的移动机器人,其特征在于,所述第一限位部(12)和所述第二限位部(25)的其中之一为限位凸台,其中另一为限位槽,所述限位凸台插接嵌合于所述限位槽内。
6.根据权利要求1所述的具有无线充电功能的移动机器人,其特征在于,所述锁扣组件(3)包括底座(31)、罩壳(32)、锁舌(33)和弹性件(34),所述罩壳(32)固定连接于所述底座(31),所述罩壳(32)上开设有通孔(321),所述锁舌(33)滑动安装于所述罩壳(32)内,所述锁舌(33)设有能穿过所述通孔(321)的卡接部(331);所述弹性件(34)设置于所述底座(31)和所述锁舌(33)之间,所述弹性件(34)能使所述卡接部(331)伸出所述通孔(321),以与所述卡接孔(13)相卡接。
7.根据权利要求6所述的具有无线充电功能的移动机器人,其特征在于,所述弹性件(34)为弹簧,所述底座(31)设置有导向柱(311),所述弹簧套设于所述导向柱(311)。
8.根据权利要求6所述的具有无线充电功能的移动机器人,其特征在于,所述罩壳(32)的侧壁和所述锁舌(33)二者中的一个设置有导向台,另一个设置有导向槽(332),所述导向台滑动连接于所述导向槽(332)。
9.根据权利要求6-8任一项所述的具有无线充电功能的移动机器人,其特征在于,所述外壳(21)的两侧设有固定台(26),所述罩壳(32)上设有凸耳(322),所述罩壳(32)通过所述凸耳(322)与所述固定台(26)连接。
10.根据权利要求9所述的具有无线充电功能的移动机器人,其特征在于,所述凸耳(322)卡接、粘接或通过紧固件连接于所述固定台(26)。
技术总结
本技术涉及机器人技术领域,公开具有无线充电功能的移动机器人,包括机身、无线充电接收模块和锁扣组件,机身的底部设有容纳腔,容纳腔的一端设有第一限位部,容纳腔的两侧设有卡接孔;无线充电接收模块安装于容纳腔内,包括外壳及设于外壳内的感应线圈、电路板和线圈定位传感器;外壳的一端设有与第一限位部配合的第二限位部;感应线圈用于与电源端的发射线圈相互感应,以对移动机器人的电池充电;线圈定位传感器用于检测无线充电接收模块相对于电源端的位置;锁扣组件固定于外壳的两侧,用于与容纳腔两侧的卡接孔弹性卡接。本技术能实现无线充电接收模块相对于无线充电发射模块的准确定位,且无线充电接收模块安装方便、拆装效率高。
技术研发人员:黄阳,朱涛涛,宋永琪,陈栋
受保护的技术使用者:深圳汉阳科技有限公司
技术研发日:20230808
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!