一种工业机器人的线缆安装装置的制作方法
本技术涉及工业机器人,具体为一种工业机器人的线缆安装装置。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,使得工业机器人被广泛应用于电子、物流、化工等各个工业领域之中,为了使机器人正常工作,机器人上通常需要使用各种不同的电线连接电源。
2、公开号为cn202825824u的工业机器人线缆安装装置,其在使用中暴露出以下缺陷:
3、上述工业机器人线缆安装装置结构比较复杂,在对机器人线缆安装和拆卸比较繁琐,不便于后期进行维护清理,所以急需一种方便拆卸和安装的工业机器人线缆安装装置。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人的线缆安装装置,以解决上述背景技术中提出的问题。
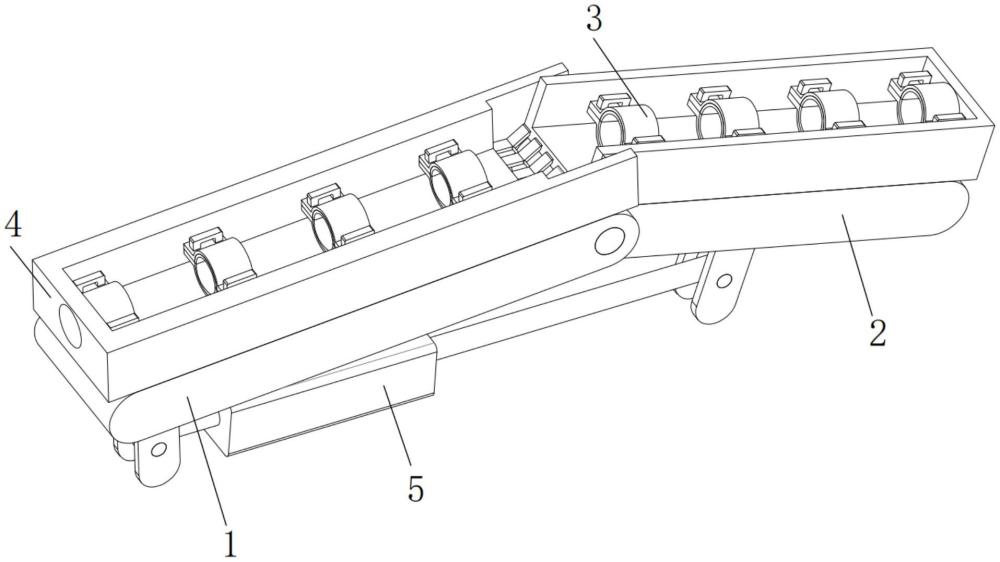
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人的线缆安装装置,包括第一连接臂和第二连接臂,所述第一连接臂和第二连接臂相转动连接,所述第一连接臂和第二连接臂的底部安装有驱动机构,所述第一连接臂和第二连接臂的顶部安装有放置机构,所述放置机构内部安装有固定机构,所述固定机构包括下弧形瓦片,所述下弧形瓦片设置有若干个且分别固定连接在所述放置机构的内侧底部,每个所述下弧形瓦片的顶部均安装有相对称的上弧形瓦片,所述下弧形瓦片和上弧形瓦片通过连接组件相连接。
3、优选的,所述连接组件包括安装槽,所述安装槽开设有若干个且分别固定连接在所述下弧形瓦片和上弧形瓦片相到面两侧的两端,所述下弧形瓦片和上弧形瓦片相对应的安装槽内部安装有弹簧,所述下弧形瓦片和上弧形瓦片通过弹簧相固定。
4、优选的,所述下弧形瓦片和上弧形瓦片内壁之间分别粘贴有相适配的防护垫片,所述上弧形瓦片外壁顶部两端分别固定连接有把手。
5、优选的,所述放置机构包括第一放置框和第二放置框,所述第一放置框和第二放置框分别固定连接在所述第一连接臂和第二连接臂的顶部,所述第一放置框和第二放置框相接触面的一端安装有铰接件,所述第一放置框和第二放置框通过铰接件相转动连接,所述第一放置框和第二放置框相对面的一侧分别开设有走线孔。
6、优选的,所述驱动机构包括第一连接块,所述第一连接块固定连接在所述第一连接臂的底部一端,所述第二连接臂的底部中间固定连接有第二连接块,所述第一连接块和第二连接块之间安装有气缸,所述气缸的输出端和所述第二连接块相转动连接,所述气缸的另一端和所述第一连接块相转动连接。
7、与现有技术相比,本实用新型的有益效果是:
8、该工业机器人的线缆安装装置,通过在第一放置框和第二放置框的内部底端固定连接下弧形瓦片,在下弧形瓦片的顶部安装相对称的上弧形瓦片,上弧形瓦片和下弧形瓦片通过弹簧相固定,在上弧形瓦片的外壁顶部两端分别安装把手,在第一放置框和第二放置框想到面两侧两端分别开设走线孔,这样方便对线缆进行拆卸和安装,从而便于后期进行维护和清理。
技术特征:
1.一种工业机器人的线缆安装装置,包括第一连接臂(1)和第二连接臂(2),其特征在于:所述第一连接臂(1)和第二连接臂(2)相转动连接,所述第一连接臂(1)和第二连接臂(2)的底部安装有驱动机构(5),所述第一连接臂(1)和第二连接臂(2)的顶部安装有放置机构(4),所述放置机构(4)内部安装有固定机构(3),所述固定机构(3)包括下弧形瓦片(302),所述下弧形瓦片(302)设置有若干个且分别固定连接在所述放置机构(4)的内侧底部,每个所述下弧形瓦片(302)的顶部均安装有相对称的上弧形瓦片(301),所述下弧形瓦片(302)和上弧形瓦片(301)通过连接组件相连接。
2.根据权利要求1所述的一种工业机器人的线缆安装装置,其特征在于:所述连接组件包括安装槽(303),所述安装槽(303)开设有若干个且分别固定连接在所述下弧形瓦片(302)和上弧形瓦片(301)相到面两侧的两端,所述下弧形瓦片(302)和上弧形瓦片(301)相对应的安装槽(303)内部安装有弹簧(304),所述下弧形瓦片(302)和上弧形瓦片(301)通过弹簧(304)相固定。
3.根据权利要求2所述的一种工业机器人的线缆安装装置,其特征在于:所述下弧形瓦片(302)和上弧形瓦片(301)内壁之间分别粘贴有相适配的防护垫片(306),所述上弧形瓦片(301)外壁顶部两端分别固定连接有把手(305)。
4.根据权利要求1所述的一种工业机器人的线缆安装装置,其特征在于:所述放置机构(4)包括第一放置框(401)和第二放置框(402),所述第一放置框(401)和第二放置框(402)分别固定连接在所述第一连接臂(1)和第二连接臂(2)的顶部,所述第一放置框(401)和第二放置框(402)相接触面的一端安装有铰接件(403),所述第一放置框(401)和第二放置框(402)通过铰接件(403)相转动连接,所述第一放置框(401)和第二放置框(402)相对面的一侧分别开设有走线孔(404)。
5.根据权利要求3所述的一种工业机器人的线缆安装装置,其特征在于:所述驱动机构(5)包括第一连接块(502),所述第一连接块(502)固定连接在所述第一连接臂(1)的底部一端,所述第二连接臂(2)的底部中间固定连接有第二连接块(501),所述第一连接块(502)和第二连接块(501)之间安装有气缸(503),所述气缸(503)的输出端和所述第二连接块(501)相转动连接,所述气缸(503)的另一端和所述第一连接块(502)相转动连接。
技术总结
本技术公开了一种工业机器人的线缆安装装置,涉及工业机器人技术领域。包括第一连接臂和第二连接臂,所述第一连接臂和第二连接臂相转动连接,所述第一连接臂和第二连接臂的底部安装有驱动机构,所述第一连接臂和第二连接臂的顶部安装有放置机构,所述放置机构内部安装有固定机构。本技术通过在第一放置框和第二放置框的内部底端固定连接下弧形瓦片,在下弧形瓦片的顶部安装相对称的上弧形瓦片,上弧形瓦片和下弧形瓦片通过弹簧相固定,在上弧形瓦片的外壁顶部两端分别安装把手,在第一放置框和第二放置框想到面两侧两端分别开设走线孔,这样方便对线缆进行拆卸和安装,从而便于后期进行维护阿和清理。
技术研发人员:幸小元
受保护的技术使用者:南通新红力机械科技有限公司
技术研发日:20230824
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!