一种外置动态制动器的制作方法
本技术涉及运动控制,特别涉及一种外置动态制动器。
背景技术:
1、伺服驱动器包括控制模块和驱动模块,驱动模块一般会包括输入电路、整流电路、母线、母线电容和制动电阻、逆变器以及输出端电路等。通常伺服电机的动态制动由动态制动电阻构成,在设备故障、急停、电源断电等各种需要制动的工况下,通过通过能耗制动使伺服电机快速停止。
2、大多数的伺服驱动器是在伺服驱动器内部自带动态制动单元,但是这种方案一般会导致伺服驱动器内部器件增多,这样也就会大大增加伺服驱动器的本身体积和成本。由于动态制动单元都是使用继电器设计的,而继电器本身有寿命问题,内置动态制动单元会增加伺服驱动器的故障率,对于某些对伺服驱动器进行频繁使用的场合会更加严重。
技术实现思路
1、本实用新型针对现有技术中存在的伺服驱动器内部自带动态制动单增加了伺服驱动器的本身体积以及故障率的技术问题,提供了一种外置动态制动器。
2、本实用新型解决上述技术问题的技术方案如下:
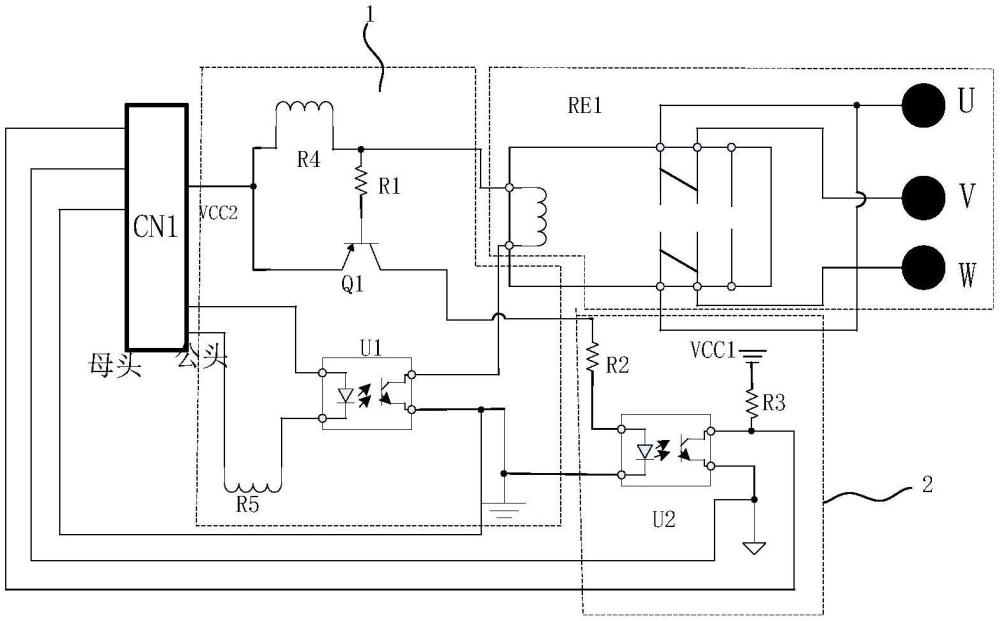
3、一种外置动态制动器,包括:cn1端口、继电器控制电路、继电器re1及继电器检测反馈电路;
4、所述继电器控制电路与所述cn1端口和所述继电器re1连接;所述继电器检测反馈电路与所述继电器控制电路和所述cn1端口连接。
5、进一步地:所述继电器控制电路包括:第一电阻r1、三极管q1、第一光耦u1、第四电阻r4及第五电阻r5;
6、所述第四电阻r4的一端与所述cn1端口的第一端连接,所述cn1端口的第一端用于提供直流电vcc2;所述第四电阻r4的另一端一方面与所述继电器re1的第一端连接,另一方面通过所述第一电阻r1与所述三极管q1的基极连接;所述三极管q1的发射极与所述cn1端口的第一端连接,所述三极管q1的集电极与所述继电器检测反馈电路连接;
7、所述第一光耦u1的第一端与所述cn1端口的第二端连接;所述第五电阻r5的一端与所述cn1端口的第三端连接,所述第五电阻r5的另一端与所述第一光耦u1的第二端连接;所述第一光耦u1的第三端与所述继电器re1的第二端连接;所述第一光耦u1的第四端接地,所述第一光耦u1的第四端与所述cn1端口的第六端连接。
8、进一步地:所述继电器检测反馈电路包括:第二光耦u2、第二电阻r2及第三电阻r3;
9、所述第二光耦u2的第一端通过所述第二电阻r2与所述三极管q1的集电极连接;所述第二光耦u2的第二端接地;所述第二光耦u2的第三端与所述cn1端口第四端连接,直流电vcc1通过所述第三电阻r3与所述第二光耦u2的第三端连接;所述第二光耦u2的第四端与所述cn1端口的第五端连接。
10、本实用新型提供的外置动态制动器至少具备以下有益效果或优点:
11、本实用新型提供的外置动态制动器,设置有cn1端口、继电器控制电路、继电器re1及继电器检测反馈电路;继电器控制电路与cn1端口和继电器re1连接;继电器检测反馈电路与继电器控制电路和cn1端口连接。该外置动态制动器,能够快速对当电机运行在发生故障时,快速对电机进行控制,并且不需要设计在伺服驱动器内部,减小了伺服驱动器的体积、降低了伺服驱动器的故障率。
技术特征:
1.一种外置动态制动器,其特征在于:包括:cn1端口、继电器控制电路、继电器re1及继电器检测反馈电路;
2.根据权利要求1所述的外置动态制动器,其特征在于:所述继电器控制电路包括:第一电阻r1、三极管q1、第一光耦u1、第四电阻r4及第五电阻r5;
3.根据权利要求2所述的外置动态制动器,其特征在于:所述继电器检测反馈电路包括:第二光耦u2、第二电阻r2及第三电阻r3;
技术总结
本技术涉及运动控制技术领域,特别涉及一种外置动态制动器,包括:CN1端口、继电器控制电路、继电器RE1及继电器检测反馈电路。继电器控制电路与CN1端口和继电器RE1连接;继电器检测反馈电路与继电器控制电路和CN1端口连接。该外置动态制动器,能够快速对当电机运行在发生故障时,快速对电机进行控制,并且不需要设计在伺服驱动器内部,减小了伺服驱动器的体积、降低了伺服驱动器的故障率。
技术研发人员:饶品凤,涂从欢,张晓光,何畏
受保护的技术使用者:深圳市正弦电气股份有限公司
技术研发日:20230824
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!