一种异轴光伏清洁组件及光伏清洁机器人的制作方法
本技术涉及光伏清洁结构,尤其涉及一种异轴光伏清洁组件及光伏清洁机器人。
背景技术:
1、光伏板又称为太阳能电池板,是一种能够将太阳光转化为电能的设备;在光伏板的具体使用场景中,通常要将光伏板倾斜地设置在户外,以最大程度地吸收太阳能;可见,光伏板通常倾斜地设置在户外,因此光伏板表面通常积累有大量灰尘。
2、对此,本领域技术人员提出了许多种光伏板清扫装置,主流的光伏板清扫装置均配有可自转的毛刷和可自转的滚轮,毛刷用于清扫光伏板的表面,滚轮用于供光伏板清扫装置在光伏板上行走,毛刷与滚轮均由电机驱动。
3、上述方案中,一般由一个电机驱动多个滚轮同时转动,理论上,多个滚轮同时转动,光伏板清扫装置相对于光伏板的角度应当是恒定的;但在实际使用时,会存在各个滚轮所受负载不同的现象,进而会导致部分负载较大的滚轮打滑,此时打滑的滚轮与未打滑的滚轮在滚动距离上存在差异,使得光伏板清扫装置相对于光伏板的角度产生变化,存在光伏板清扫装置被光伏板卡死的风险。因此,如何平稳地调节光伏板清扫装置的姿态是本领域亟待解决的技术问题。
技术实现思路
1、本实用新型的目的在于提供一种异轴光伏清洁组件及光伏清洁机器人,解决当前光伏板清扫装置不能平稳地控制自身姿态的技术问题。
2、为达此目的,本实用新型采用以下技术方案:
3、一种异轴光伏清洁组件,包括辊刷组件、驱动电机组件、第一驱动轴及第二驱动轴;所述第一驱动轴及所述第二驱动轴均能受所述驱动电机组件驱动而独立转动;
4、所述第一驱动轴及所述第二驱动轴间隔设置,且均沿第一方向延伸设置;所述第一驱动轴上间隔地固定连接有第一行走轮和第二行走轮,所述第二驱动轴上间隔地固定连接有第三行走轮和第四行走轮;
5、其中,所述第一行走轮及所述第三行走轮沿垂直于所述第一方向的方向间隔设置;沿所述第一方向,所述第一行走轮及所述第三行走轮均位于所述第二行走轮与所述第四行走轮之间。
6、可选地,所述第一驱动轴于所述第四行走轮的一侧还转动连接有第一支撑轮,所述第二驱动轴于所述第三行走轮的一侧还转动连接有第二支撑轮。
7、可选地,所述第一驱动轴于所述第一行走轮与所述第二行走轮之间、所述第一行走轮与所述第一支撑轮之间转动连接有第三支撑轮;
8、所述第二驱动轴于所述第三行走轮与所述第四行走轮之间、所述第三行走轮与所述第二支撑轮之间转动连接有第四支撑轮。
9、可选地,所述辊刷组件包括辊刷电机,所述辊刷电机的电机轴固定连接有多个辊刷单元。
10、可选地,沿垂直于所述第一方向的方向,所述第一驱动轴及所述第二驱动轴位于任意两个所述辊刷单元之间。
11、可选地,所述辊刷单元的数量为两个,所述第一驱动轴及所述第二驱动轴位于两个所述辊刷单元之间。
12、可选地,所述辊刷电机位于所述第一驱动轴的一侧,所述驱动电机组件位于所述第一驱动轴的另一侧。
13、一种光伏清洁机器人,包括悬挂部,所述悬挂部上安装有如上所述的异轴光伏清洁组件;所述悬挂部与所述异轴光伏清洁组件之间形成有供所述光伏板卡入的安装间隙。
14、与现有技术相比,本实用新型具有以下有益效果:
15、本实用新型提供的异轴光伏清洁组件及光伏清洁机器人,异轴光伏清洁组件可以通过驱动电机组件分别驱动第一驱动轴与第二驱动轴独立转动,且两个驱动轴上均独立配置有行走轮,因此可以通过设置第一驱动轴与第二驱动轴的速度差,弥补行走轮之间的滚动距离差异,以及时校正异轴光伏清洁组件相对于光伏板的角度,消除异轴光伏清洁组件卡死的风险;并且行走轮呈“z”型分布于驱动轴上,即对于任意驱动轴而言,其至少通过两个行走轮在光伏板上滚动,当两个驱动轴以差速运转时,异轴光伏清洁组件存在角度上的变化,对于位于外侧的第二行走轮及第四行走轮而言,其需要提供更大的牵引力以令异轴光伏清洁组件偏转,此时,第一行走轮的设置能够平衡第一驱动轴的载荷,减少第二行走轮沿第一驱动轴滑移的风险,第三行走轮的设置能够平衡第二驱动轴的载荷,减少第四行走轮沿第二驱动轴滑移的风险,使得异轴光伏清洁组件及光伏清洁机器人能够平稳地控制自身姿态。
技术特征:
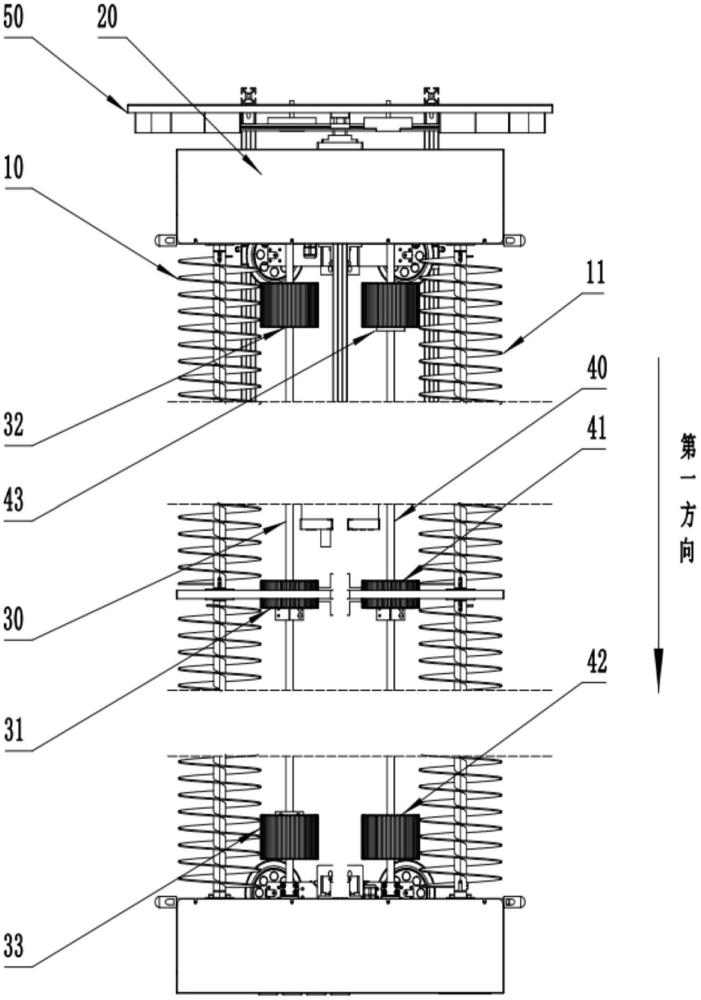
1.一种异轴光伏清洁组件,其特征在于,包括辊刷组件(10)、驱动电机组件(20)、第一驱动轴(30)及第二驱动轴(40);所述第一驱动轴(30)及所述第二驱动轴(40)均能受所述驱动电机组件(20)驱动而独立转动;
2.根据权利要求1所述的一种异轴光伏清洁组件,其特征在于,所述第一驱动轴(30)于所述第四行走轮(42)的一侧还转动连接有第一支撑轮(33),所述第二驱动轴(40)于所述第三行走轮(41)的一侧还转动连接有第二支撑轮(43)。
3.根据权利要求2所述的一种异轴光伏清洁组件,其特征在于,所述第一驱动轴(30)于所述第一行走轮(31)与所述第二行走轮(32)之间、所述第一行走轮(31)与所述第一支撑轮(33)之间转动连接有第三支撑轮(34);
4.根据权利要求1所述的一种异轴光伏清洁组件,其特征在于,所述辊刷组件(10)包括辊刷电机,所述辊刷电机的电机轴固定连接有多个辊刷单元(11)。
5.根据权利要求4所述的一种异轴光伏清洁组件,其特征在于,沿垂直于所述第一方向的方向,所述第一驱动轴(30)及所述第二驱动轴(40)位于任意两个所述辊刷单元(11)之间。
6.根据权利要求4所述的一种异轴光伏清洁组件,其特征在于,所述辊刷单元(11)的数量为两个,所述第一驱动轴(30)及所述第二驱动轴(40)位于两个所述辊刷单元(11)之间。
7.根据权利要求4所述的一种异轴光伏清洁组件,其特征在于,所述辊刷电机位于所述第一驱动轴(30)的一侧,所述驱动电机组件(20)位于所述第一驱动轴(30)的另一侧。
8.一种光伏清洁机器人,其特征在于,包括悬挂部(50),所述悬挂部(50)上安装有如权利要求1-7中任一项所述的异轴光伏清洁组件;所述悬挂部(50)与所述异轴光伏清洁组件之间形成有供所述光伏板卡入的安装间隙。
技术总结
本技术提供的异轴光伏清洁组件及光伏清洁机器人,其包括辊刷组件、驱动电机组件、第一驱动轴及第二驱动轴;第一驱动轴及第二驱动轴均能受驱动电机组件驱动而独立转动;第一驱动轴及第二驱动轴间隔设置,且均沿第一方向延伸设置;第一驱动轴上间隔地固定连接有第一行走轮和第二行走轮,第二驱动轴上间隔地固定连接有第三行走轮和第四行走轮;其中,第一行走轮及第三行走轮沿垂直于第一方向的方向间隔设置;沿第一方向,第一行走轮及第三行走轮均位于第二行走轮与第四行走轮之间。本方案可以通过设置第一驱动轴与第二驱动轴的速度差,弥补行走轮之间的滚动距离差异,以及时校正异轴光伏清洁组件相对于光伏板的角度,实现自身姿态的及时调节。
技术研发人员:王小宁
受保护的技术使用者:深圳市鑫旭源环保有限公司
技术研发日:20231011
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!