一种可手动微调的爪极式直线步进电机的制作方法
本申请涉及步进电机,更具体地涉及一种可手动微调的爪极式直线步进电机。
背景技术:
1、爪极式电机即电机内部具有至少两组爪极端,两组爪极端朝向相反,且两组爪极端在周向方向上呈交替布置。直线步进电机即线圈通电后,电机转子的转动将被转换为输出杆的直线往复运动。
2、我司现有一种爪极式直线步进电机,如专利文件(cn211089411u)中所公开的,包括线圈骨架、外壳、转子、导向杆和螺杆,所述线圈骨架固定安装在所述外壳上,所述线圈骨架上缠绕线圈,所述转子转动安装在所述骨架上,所述导向杆的一端通过限位结构滑动设置于所述外壳上,且所述导向杆的另一端与所述螺杆固定连接且同步动作,所述螺杆与所述转子螺纹连接,当所述线圈骨架上的所述线圈得电后,所述转子作周向转动,则与所述转子螺纹连接的所述螺杆因所述导向杆仅能沿轴向移动,而在螺旋传动的原理下作轴向移动并带动所述导向杆作往复直线运动。但是:有时在设备的安装调机时,安装调试人员需令导向杆作短行程的往复直线运动,但此时由于安装调试人员并未令所述线圈与外部电源连通,而现有的爪极式直线步进电机又仅能在所述线圈得电后才令所述导向杆作直线运动,导致安装调试人员不得不提前接线,影响安装调试工作的连续性,存在进一步优化的空间。
3、因此提供一种可在失电状态下作短行程直线移动、便于调试的可手动微调的爪极式直线步进电机的需求是存在的。
技术实现思路
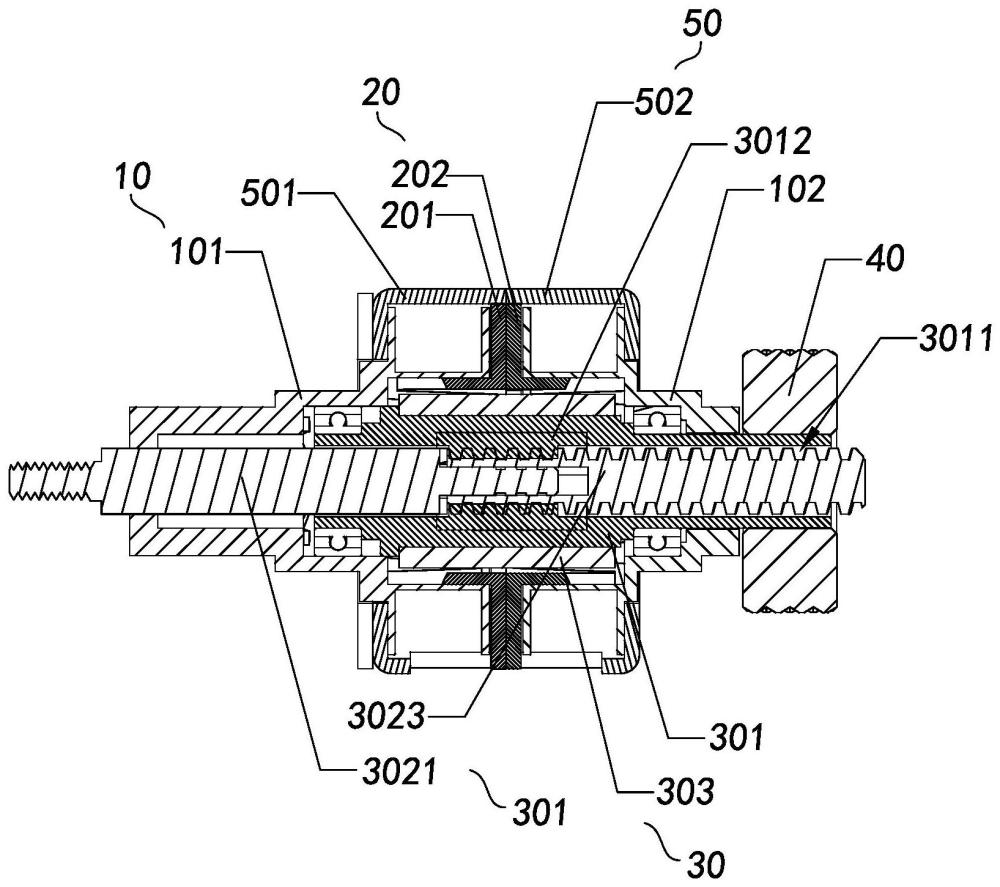
1、本申请主要目的在于提供一种可手动微调的爪极式直线步进电机,其中,所述可手动微调的爪极式直线步进电机包括一骨架组合、一定子组件和一转子组件,所述骨架组合包括一前骨架和一后骨架,所述定子组件设于所述前骨架和所述后骨架之间,所述转子组件包括一转动件、一滑动件和一磁钢,所述转动件转动安装在所述骨架组合上,所述磁钢套设在所述转动件上,且所述定子组件位于所述磁钢的外侧,所述滑动件滑动设置于所述前骨架上,且所述滑动件与所述转动件螺旋传动连接,所述转动件背离所述前骨架的一端暴露于外部,本实用新型通过令转动件的一端暴露在外部,安装调试人员在调试时,在骨架组合上线圈失电情况下,安装调试人员可转动暴露在外部的所述转动件,以令所述滑动件作短行程的往复直线运动以满足调试需求,相较于现有技术,具有可在失电状态下作短行程直线移动、便于调试的优势。
2、本申请的另一目的在于提供一种可手动微调的爪极式直线步进电机,其中,所述可手动微调的爪极式直线步进电机还包括一手拧件,所述手拧件设于所述后骨架背离所述前骨架的一端,且所述手拧件与所述转动件连接,当所述手拧件转动时,所述转动件跟随转动,通过设置手拧件,便于安装调试人员转动所述转动件。
3、为了实现上述至少一发明目的,本申请提供了一种可手动微调的爪极式直线步进电机,其中所述可手动微调的爪极式直线步进电机,包括:
4、一骨架组合,所述骨架组合包括一前骨架和一后骨架;以及
5、一定子组件,所述定子组件设于所述前骨架和所述后骨架之间;以及
6、一转子组件,所述转子组件包括一转动件、一滑动件和一磁钢,所述转动件转动安装在所述骨架组合上,所述磁钢套设在所述转动件上,且所述定子组件位于所述磁钢的外侧,所述滑动件滑动设置于所述前骨架上,且所述滑动件与所述转动件螺旋传动连接,所述转动件背离所述前骨架的一端暴露于外部。
7、在本申请一个或多个实施例中,所述可手动微调的爪极式直线步进电机还包括一手拧件,所述手拧件设于所述后骨架背离所述前骨架的一端,且所述手拧件与所述转动件连接,当所述手拧件转动时,所述转动件跟随转动。
8、在本申请一个或多个实施例中,所述可手动微调的爪极式直线步进电机还包括一外壳组合,所述外壳组合包括一前外壳和一后外壳,所述前外壳与所述前骨架固定连接,所述后外壳与所述后骨架固定连接,所述定子组件的两端分别与所述前外壳和所述后外壳抵靠。
9、在本申请一个或多个实施例中,所述前外壳和所述后外壳相对的一端均具有一凹腔,所述凹腔的底壁具有一通过孔和若干个呈环形布置的第一爪极端,所述前骨架和所述后骨架相对的一端均具有一绕线部和一贯穿的阶梯腔,所述绕线部位于所述阶梯腔的外侧,所述绕线部上绕设有线圈,所述绕线部背离所述定子组件的一端具有若干个呈环形布置的插入孔,所述插入孔与所述第一爪极端一一对应,所述前骨架和所述后骨架分别伸入所述前外壳和所述后外壳的所述凹腔并穿过所述通过孔,且所述绕线部置于所述凹腔内,且所述第一爪极端穿过对应的所述插入孔。
10、在本申请一个或多个实施例中,所述定子组件包括一第一定子铁芯和一第二定子铁芯,所述第一定子铁芯和所述第二定子铁芯相背的一端均具有若干个呈环形布置的第二爪极端,所述第一定子铁芯和所述第二定子铁芯上的所述第二爪极端分别伸入所述前骨架和所述后骨架的所述阶梯腔内,且所述第二爪极端与对应的所述第一爪极端呈交替布置且朝向相反。
11、在本申请一个或多个实施例中,所述前骨架上的所述阶梯腔背离所述定子组件的一端端部具有一防转孔,所述防转孔的孔壁具有二对称布置的扇形凸起,所述滑动件具有一圆柱部,所述圆柱部的侧面具有二对称布置的扇形槽,所述圆柱部穿过所述防转孔,且所述扇形凸起滑动设置于所述扇形槽内。
12、在本申请一个或多个实施例中,所述转动件具有一贯穿孔,所述贯穿孔的孔壁上具有一螺纹部,所述滑动件靠近所述手拧件的一端具有一丝杆部,所述滑动件具有所述丝杆部的一端穿过所述贯穿孔,且所述丝杆部与所述螺纹部螺纹连接。
13、在本申请一个或多个实施例中,所述可手动微调的爪极式直线步进电机还包括一连接板,所述连接板位于所述前外壳背离所述后外壳的一端,且所述连接板套接在所述前骨架上。
14、在本申请实施例中,可手动微调的爪极式直线步进电机包括一骨架组合、一定子组件和一转子组件,骨架组合包括一前骨架和一后骨架,定子组件设于前骨架和后骨架之间,转子组件包括一转动件、一滑动件和一磁钢,转动件转动安装在骨架组合上,磁钢套设在转动件上,且定子组件位于磁钢的外侧,滑动件滑动设置于前骨架上,且滑动件与转动件螺旋传动连接,转动件背离前骨架的一端暴露于外部,本实用新型通过令转动件的一端暴露在外部,安装调试人员在调试时,在骨架组合上线圈失电情况下,安装调试人员可转动暴露在外部的转动件,以令滑动件作短行程的往复直线运动以满足调试需求,相较于现有技术,具有可在失电状态下作短行程直线移动、便于调试的优势。
技术特征:
1.一种可手动微调的爪极式直线步进电机,其特征在于:所述可手动微调的爪极式直线步进电机包括
2.根据权利要求1所述的可手动微调的爪极式直线步进电机,其特征在于:所述可手动微调的爪极式直线步进电机还包括一手拧件,所述手拧件设于所述后骨架背离所述前骨架的一端,且所述手拧件与所述转动件连接,当所述手拧件转动时,所述转动件跟随转动。
3.根据权利要求2所述的可手动微调的爪极式直线步进电机,其特征在于:所述可手动微调的爪极式直线步进电机还包括一外壳组合,所述外壳组合包括一前外壳和一后外壳,所述前外壳与所述前骨架固定连接,所述后外壳与所述后骨架固定连接,所述定子组件的两端分别与所述前外壳和所述后外壳抵靠。
4.根据权利要求3所述的可手动微调的爪极式直线步进电机,其特征在于:所述前外壳和所述后外壳相对的一端均具有一凹腔,所述凹腔的底壁具有一通过孔和若干个呈环形布置的第一爪极端,所述前骨架和所述后骨架相对的一端均具有一绕线部和一贯穿的阶梯腔,所述绕线部位于所述阶梯腔的外侧,所述绕线部上绕设有线圈,所述绕线部背离所述定子组件的一端具有若干个呈环形布置的插入孔,所述插入孔与所述第一爪极端一一对应,所述前骨架和所述后骨架分别伸入所述前外壳和所述后外壳的所述凹腔并穿过所述通过孔,且所述绕线部置于所述凹腔内,且所述第一爪极端穿过对应的所述插入孔。
5.根据权利要求4所述的可手动微调的爪极式直线步进电机,其特征在于:所述定子组件包括一第一定子铁芯和一第二定子铁芯,所述第一定子铁芯和所述第二定子铁芯相背的一端均具有若干个呈环形布置的第二爪极端,所述第一定子铁芯和所述第二定子铁芯上的所述第二爪极端分别伸入所述前骨架和所述后骨架的所述阶梯腔内,且所述第二爪极端与对应的所述第一爪极端呈交替布置且朝向相反。
6.根据权利要求5所述的可手动微调的爪极式直线步进电机,其特征在于:所述前骨架上的所述阶梯腔背离所述定子组件的一端端部具有一防转孔,所述防转孔的孔壁具有二对称布置的扇形凸起,所述滑动件具有一圆柱部,所述圆柱部的侧面具有二对称布置的扇形槽,所述圆柱部穿过所述防转孔,且所述扇形凸起滑动设置于所述扇形槽内。
7.根据权利要求2-6任一所述的可手动微调的爪极式直线步进电机,其特征在于:所述转动件具有一贯穿孔,所述贯穿孔的孔壁上具有一螺纹部,所述滑动件靠近所述手拧件的一端具有一丝杆部,所述滑动件具有所述丝杆部的一端穿过所述贯穿孔,且所述丝杆部与所述螺纹部螺纹连接。
8.根据权利要求3-6任一所述的可手动微调的爪极式直线步进电机,其特征在于:所述可手动微调的爪极式直线步进电机还包括一连接板,所述连接板位于所述前外壳背离所述后外壳的一端,且所述连接板套接在所述前骨架上。
技术总结
本申请涉及步进电机技术领域,更具体地涉及一种可手动微调的爪极式直线步进电机,包括:一骨架组合、一定子组件和一转子组件,骨架组合包括一前骨架和一后骨架,定子组件设于前骨架和后骨架之间,转子组件包括一转动件、一滑动件和一磁钢,转动件转动安装在骨架组合上,磁钢套设在转动件上,且定子组件位于磁钢的外侧,滑动件滑动设置于前骨架上,且滑动件与转动件螺旋传动连接,转动件背离前骨架的一端暴露于外部,本技术通过令转动件一端暴露在外部,安装调试人员在调试时,在骨架组合上线圈失电情况下,可转动暴露在外部的转动件,以令滑动件作短行程往复直线运动以满足调试需求,实现可在失电状态下作短行程直线移动、便于调试的优势。
技术研发人员:张雪峰,任飞翔
受保护的技术使用者:宁波鼎祥电器制造有限公司
技术研发日:20231221
技术公布日:2024/12/26
- 还没有人留言评论。精彩留言会获得点赞!