电动机控制装置的制作方法
本发明涉及一种用于控制电动机的装置。
背景技术:
1、在现有的电动机控制装置中,控制电动机电流,使得由电动机产生的转矩跟随转矩指令。此时,产生与电动机的磁极位置相对应的转矩振动即转矩脉动,有时会引起振动和噪声。因此,设计了一种减小转矩脉动的电动机控制方法。
2、作为通过抑制电动机的转矩脉动来减小振动的控制方法,例如,已知有专利文献1。专利文献1中记载的电动机控制装置生成与电动机产生的转矩相对应的转矩脉动的振幅和相位的相关表格,参考该表格计算与转矩指令值相对应的转矩脉动补偿值,以抑制转矩脉动的振幅和相位,并将转矩脉动补偿值叠加到转矩指令值上,执行电动机的电流控制。由此,通过抑制电动机的转矩脉动来减小振动。
3、另一方面,为了保护电动机或逆变器,通常为逆变器的输出电流设定上限值,当给出与接近该上限值的输出电流相对应的转矩指令值时,叠加了转矩脉动补偿值的调整后的转矩指令值被限制为使得输出电流在上限值以下的值。结果,有时会产生不希望的转矩脉动或平均转矩的降低。
4、作为防止由于叠加了转矩脉动补偿值的调整后的转矩指令值被限制而产生的平均转矩下降的方法,例如,已知有专利文献2。在专利文献2中记载的旋转电机的控制装置中,当通过将振动转矩指令值的振幅与基本转矩指令值相加而获得的振动最大值大于上限指令值时,减小振动转矩指令值的振幅,使得振动最大值在上限指令值以下,并计算最终转矩指令值。由此,防止最终转矩指令值的平均值低于基本转矩指令值。
5、现有技术文献
6、专利文献
7、[专利文献1]日本专利第5784787号公报
8、[专利文献2]日本专利第6400231号公报
技术实现思路
1、发明所要解决的技术问题
2、专利文献1、2中没有提到抑制由于输出电流的限制而产生的不希望的转矩脉动。
3、鉴于上述问题,本发明的主要目的是即使在给出接近输出电流的上限值的转矩指令值的情况下,也有效地抑制转矩脉动。
4、用于解决技术问题的技术手段
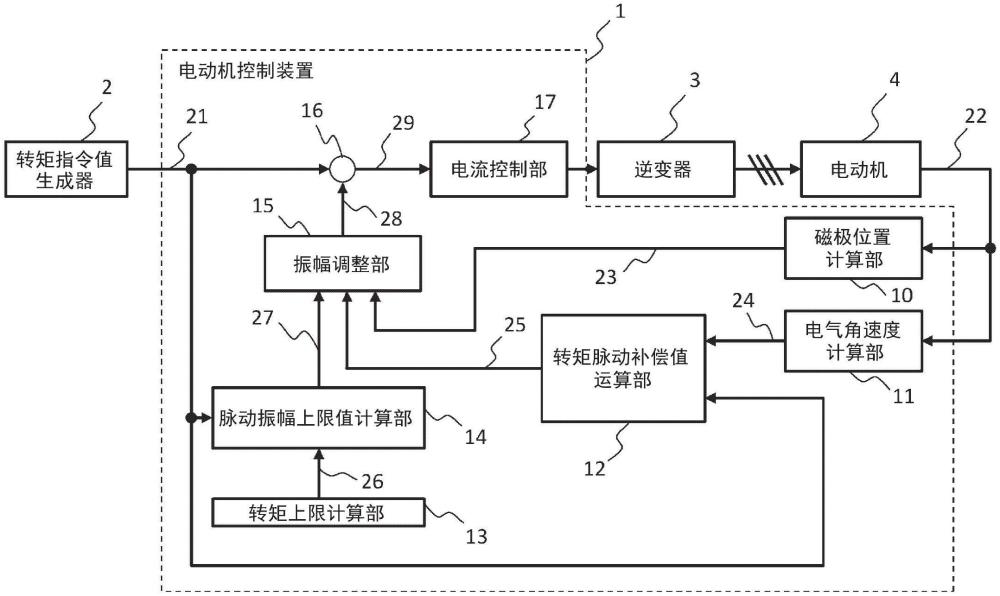
5、本发明所涉及的电动机控制装置基于来自上位控制器的转矩指令值来控制电动机,包括:转矩脉动补偿值运算部,该转矩脉动补偿值运算部基于所述电动机的电气角速度和所述转矩指令值,计算用于补偿在所述电动机中产生的转矩脉动的转矩脉动补偿值;脉动振幅上限值计算部,该脉动振幅上限值计算部基于所述转矩指令值和对所述电动机设定的转矩上限值,来计算对于所述转矩脉动补偿值的振幅的上限值即脉动振幅上限值;以及振幅调整部,该振幅调整部基于所述脉动振幅上限值来调整所述转矩脉动补偿值中的各个频率分量的振幅,并计算振幅调整后的转矩脉动补偿值,基于由所述振幅调整部计算出的所述振幅调整后的转矩脉动补偿值和所述转矩指令值,计算用于控制所述电动机的最终转矩指令值。
6、发明效果
7、根据本发明,即使在给出接近输出电流的上限值的转矩指令值的情况下,也能有效地抑制转矩脉动。
技术特征:
1.一种电动机控制装置,基于来自上位控制器的转矩指令值来控制电动机,其特征在于,包括:
2.如权利要求1所述的电动机控制装置,其特征在于,
3.如权利要求1所述的电动机控制装置,其特征在于,
4.如权利要求3所述的电动机控制装置,其特征在于,
5.如权利要求1所述的电动机控制装置,其特征在于,
6.如权利要求1所述的电动机控制装置,其特征在于,
7.如权利要求1所述的电动机控制装置,其特征在于,
8.如权利要求7所述的电动机控制装置,其特征在于,
9.如权利要求7所述的电动机控制装置,其特征在于,
10.如权利要求7所述的电动机控制装置,其特征在于,
11.如权利要求1所述的电动机控制装置,其特征在于,
12.如权利要求7所述的电动机控制装置,其特征在于,
技术总结
本发明的电动机控制装置包括:转矩脉动补偿值运算部,其基于电动机的电气角速度和转矩指令值计算用于补偿在电动机中产生的转矩脉动的转矩脉动补偿值;脉动振幅上限值计算部,其基于转矩指令值和对电动机设定的转矩上限值,来计算对于转矩脉动补偿值的振幅的上限值即脉动振幅上限值;以及振幅调整部,其基于脉动振幅上限值来调整转矩脉动补偿值中的各个频率分量的振幅,并计算振幅调整后的转矩脉动补偿值。
技术研发人员:武田广大,谷口峻,原崇文,高桥史大
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!