电机响应方法、推进器、可移动设备及可读存储介质与流程
本申请涉及电机领域,尤其涉及一种电机响应方法、推进器、可移动设备及计算机可读存储介质。
背景技术:
1、可移动设备的驱动方式有多种,而电力驱动是一种常见的驱动方式,电力驱动方式中,电机往往作为主要动力源为可移动设备提供动力。
2、相关技术中,用户操控油门操控装置的油门操纵件,油门操控装置基于油门操纵件的油门深度输出相应的油门指令给电机,电机基于油门指令指示的功率进行响应。然而,相关技术中,电机的功率响应方式对驾驶场景变化的适应性较差,无法给用户提供较好的驾驶体验。
技术实现思路
1、针对上述技术问题,本申请提供一种电机响应方法、推进器、可移动设备及计算机可读存储介质,技术方案如下:
2、根据本申请的第一方面,提供一种电机响应方法,电机响应方法包括:
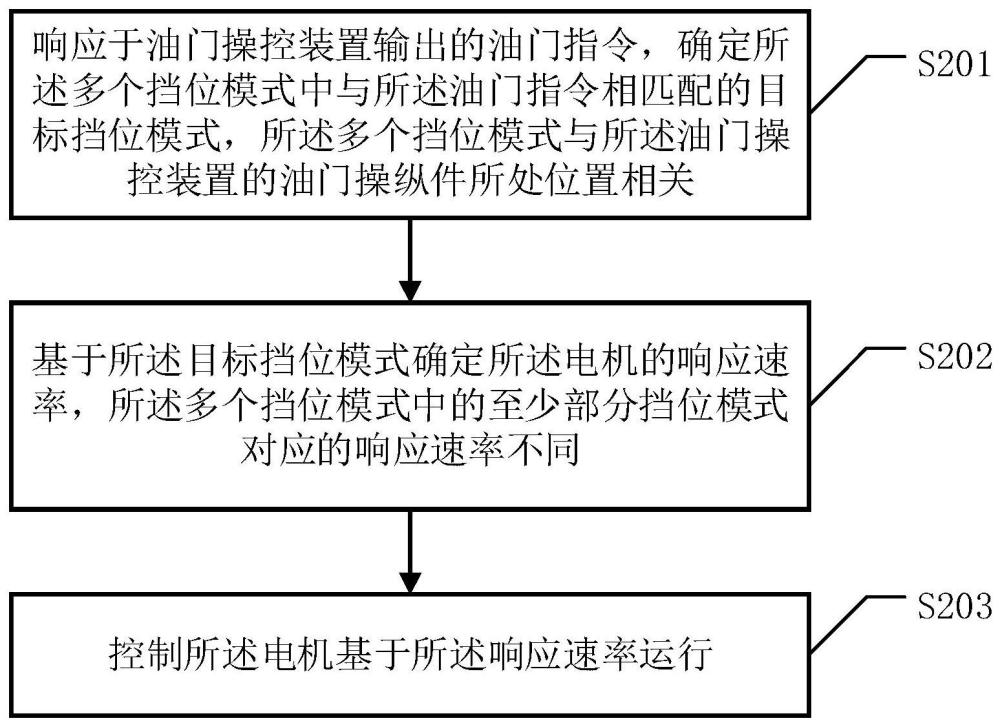
3、响应于油门操控装置输出的油门指令,确定多个挡位模式中与所述油门指令相匹配的目标挡位模式,所述多个挡位模式与所述油门操控装置的油门操纵件所处位置相关;
4、基于所述目标挡位模式确定所述电机的响应速率,所述多个挡位模式中的至少部分挡位模式对应的响应速率不同;
5、控制所述电机基于所述响应速率运行。
6、根据本申请的第二方面,提供一种推进器,推进器包括:
7、电机;和
8、处理器,所述处理器与所述电机连接,所述处理器用以执行如第一方面所述的电机响应方法。
9、根据本申请的第三方面,提供一种可移动设备,可移动设备包括:
10、本体;及
11、如第二方面所述的推进器,所述推进器装载于所述本体。
12、根据本申请的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的电机响应方法。
13、本申请提供的技术方案,在多个挡位模式中确定与油门指令相匹配的目标挡位模式,并基于确定出的目标挡位模式确定电机的响应速率,其中,在多个挡位模式中至少部分挡位模式对应的响应速率是不同的,则能够根据不同的挡位模式控制电机基于不同的响应速率运行,提升电机的响应速率对驾驶场景变化的适应性,改善用户的驾驶体验。
14、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种电机响应方法,其特征在于,所述电机响应方法包括:
2.根据权利要求1所述的电机响应方法,其特征在于,所述多个挡位模式包括电机转动方向相同的多个挡位模式,所述电机转动方向相同的多个挡位模式对应的响应速率不同。
3.根据权利要求2所述的电机响应方法,其特征在于,所述电机转动方向相同的多个挡位模式包括前进挡加速模式和前进挡减速模式,所述前进挡加速模式对应的响应速率低于所述前进挡减速模式对应的响应速率;和/或
4.根据权利要求1所述的电机响应方法,其特征在于,所述多个挡位模式包括前进挡位模式和后退挡位模式,所述前进挡位模式对应的响应速率低于所述后退挡位模式的响应速率。
5.根据权利要求1所述的电机响应方法,其特征在于,所述多个挡位模式包括后退挡加速模式和后退挡减速模式,所述后退挡加速模式对应的响应速率等于所述后退挡减速模式对应的响应速率;和/或
6.根据权利要求1所述的电机响应方法,其特征在于,所述多个挡位模式包括前进挡位模式和后退挡位模式,所述油门指令包括挡位标识信息,所述挡位标识信息包括第一挡位标识信息和第二挡位标识信息;所述确定多个挡位模式中与所述油门指令相匹配的目标挡位模式,包括:
7.根据权利要求6所述的电机响应方法,其特征在于,所述前进挡位模式包括前进挡加速模式和前进挡减速模式;所述在所述油门指令包括所述第一挡位标识信息时,确定所述目标挡位模式为所述前进挡位模式,包括:
8.根据权利要求6所述的电机响应方法,其特征在于,所述后退挡位模式包括后退挡加速模式和后退挡减速模式;所述在所述油门指令包括所述第二挡位标识信息时,确定所述目标挡位模式为所述后退挡位模式,包括:
9.根据权利要求1所述的电机响应方法,其特征在于,所述控制所述电机基于所述响应速率运行,包括:
10.根据权利要求9所述的电机响应方法,其特征在于,多个所述调整周期中的功率变化量相同;或
11.根据权利要求10所述的电机响应方法,其特征在于,在多个所述调整周期中的功率变化量相同时,所述基于所述响应速率确定所述电机的功率变化量,包括:
12.根据权利要求10所述的电机响应方法,其特征在于,在多个所述调整周期中的功率变化量不同时,所述基于所述响应速率确定所述电机的功率变化量,包括:
13.根据权利要求9所述的电机响应方法,其特征在于,所述控制所述电机基于所述响应速率运行,还包括:
14.根据权利要求1所述的电机响应方法,其特征在于,所述电机应用于可移动设备,所述响应速率与所述可移动设备的技术参数相关。
15.根据权利要求14所述的电机响应方法,其特征在于,所述技术参数包括所述可移动设备的质量,所述响应速率与所述质量正相关;和/或
16.根据权利要求15所述的电机响应方法,其特征在于,所述电机应用于水域可移动设备,所述响应速率与所述水域可移动设备航行的水域的波浪等级正相关。
17.根据权利要求1所述的电机响应方法,其特征在于,所述电机应用于可移动设备,所述可移动设备处于不同驾驶模式下时,所述电机的最大功率不同,所述响应速率与所述最大功率正相关。
18.根据权利要求17所述的电机响应方法,其特征在于,所述最大功率与预定参数相关,所述预定参数包括所述驾驶模式与所述最大功率的映射关系、电池的放电能力和所述电机的故障信息,所述电池用于为所述电机供电。
19.根据权利要求18所述的电机响应方法,其特征在于,所述预定参数还包括用户的续航需求,所述续航需求与所述电池的电量相关。
20.根据权利要求18所述的电机响应方法,其特征在于,不同驾驶模式对应的预定参数不同。
21.一种推进器,其特征在于,所述推进器包括:
22.一种可移动设备,其特征在于,所述可移动设备包括:
23.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-20任一项所述的电机响应方法。
技术总结
本申请公开了一种电机响应方法、推进器、可移动设备及计算机可读存储介质。电机响应方法包括:响应于油门操控装置输出的油门指令,确定所述多个挡位模式中与所述油门指令相匹配的目标挡位模式,所述多个挡位模式与所述油门操控装置的油门操纵件所处位置相关;基于所述目标挡位模式确定所述电机的响应速率,所述多个挡位模式中的至少部分挡位模式对应的响应速率不同;控制所述电机基于所述响应速率运行。本申请能够提升电机的响应速率对驾驶场景变化的适应性,改善用户的驾驶体验。
技术研发人员:温振钊,杨中州
受保护的技术使用者:广东逸动科技有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!