基于激光测距数理统计的刀闸位置状态判断方法及装置与流程
本发明涉及刀闸状态检测,特别是涉及一种基于激光测距数理统计的刀闸位置状态判断方法及装置。
背景技术:
1、现有的刀闸位置状态测量方法通常采用磁感应开关感应刀闸闭合后产生的磁感应信号来判断闭合还是打开,属于同原理的测量方法,这种方法的缺点在于当外界有强烈电磁干扰时会对磁感应开关进行影响导致测量方法失效,因此需要一种非同原理的测量方法避免产生测量失效的情况。
技术实现思路
1、本发明的目的是提供一种基于激光测距数理统计的刀闸位置状态判断方法及装置,可避免产生测量失效的情况。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于激光测距数理统计的刀闸位置状态判断方法,包括:
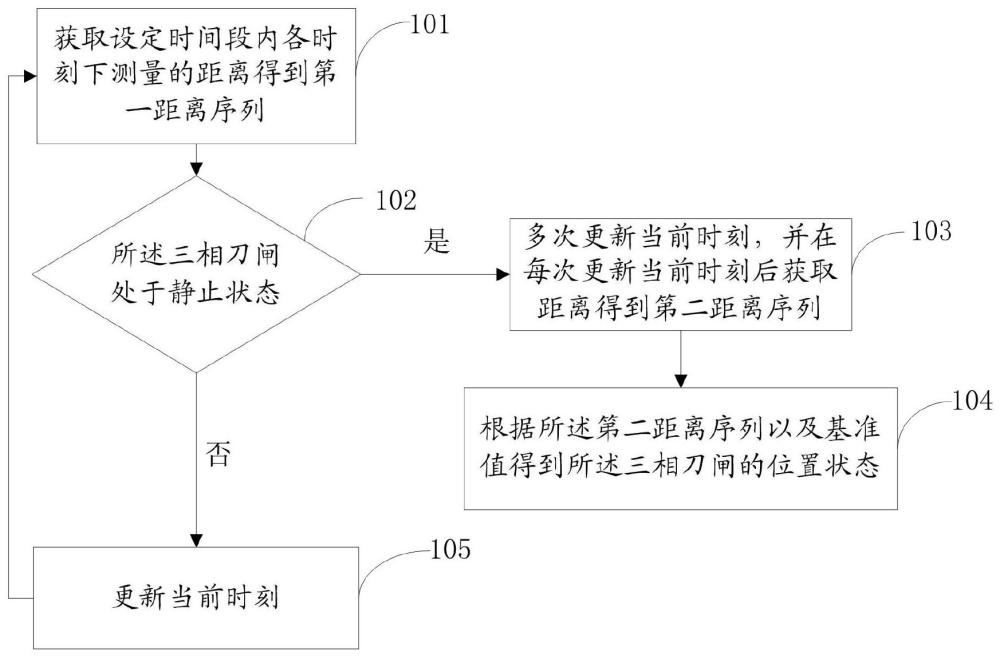
4、获取设定时间段内各时刻下测量的距离得到第一距离序列;所述设定时间段内最后一个时刻为当前时刻;所述距离为激光测距仪模块测量的所述激光测距仪模块到三相刀闸中各相接触点的位置;
5、根据所述第一距离序列判断所述三相刀闸是否处于静止状态,得到第一判断结果;
6、若所述第一判断结果为是,则多次更新当前时刻,并在每次更新当前时刻后获取距离得到第二距离序列;
7、根据所述第二距离序列以及基准值得到所述三相刀闸的位置状态;所述基准值为合闸基准值或者分闸基准值;所述位置状态为合闸状态或者分闸状态;
8、若所述第一判断结果为否,则更新当前时刻并返回所述获取设定时间段内各时刻下测量的距离得到第一距离序列的步骤。
9、可选的,获取设定时间段内各时刻下测量的距离得到第一距离序列,具体包括:
10、获取所述设定时间段内各时刻下第一激光测距仪到所述三相刀闸中a相接触点的距离得到第一a相距离序列;
11、获取所述设定时间段内各时刻下第二激光测距仪到所述三相刀闸中b相接触点的距离得到第一b相距离序列;
12、获取所述设定时间段内各时刻下第三激光测距仪到所述三相刀闸中c相接触点的距离得到第一c相距离序列;
13、所述第一a相距离序列、所述第一b相距离序列和所述第一c相距离序列组成所述第一距离序列。
14、可选的,根据所述第一距离序列判断所述三相刀闸是否处于静止状态,具体包括:
15、对于所述三相刀闸中的任意一相,计算所述设定时间段内各时刻下第一激光测距仪到所述相接触点的距离的均值,得到所述相的距离均值;
16、计算所述设定时间段内各时刻下第一激光测距仪到所述相接触点的距离与所述相的距离均值的差值得到差值序列;
17、判断所述差值序列中各差值的绝对值是否均小于第一设定阈值,得到第二判断结果;
18、若所述第二判断结果为是,则确定所述相处于静止状态;
19、若所述第二判断结果为否,则确定所述相不处于静止状态;
20、若所述三相刀闸的所有相均处于静止状态,则所述三相刀闸处于静止状态。
21、可选的,多次更新当前时刻,并在每次更新当前时刻后获取距离得到第二距离序列,具体包括:
22、多次更新当前时刻,并在每次更新当前时刻后获取第一激光测距仪到所述三相刀闸中a相接触点的距离得到第二a相距离序列;
23、多次更新当前时刻,并在每次更新当前时刻后获取第一激光测距仪到所述三相刀闸中b相接触点的距离得到第二b相距离序列;
24、多次更新当前时刻,并在每次更新当前时刻后获取第一激光测距仪到所述三相刀闸中c相接触点的距离得到第二c相距离序列;
25、所述第二a相距离序列、所述第二b相距离序列和所述第二c相距离序列组成所述第二距离序列。
26、可选的,根据所述第二距离序列以及基准值得到所述三相刀闸的位置状态,具体包括:
27、对于所述三相刀闸中的任意一相,计算在每次更新当前时刻后获取第一激光测距仪到所述三相刀闸中所述相接触点的距离与合闸基准值的差值是否均小于第二设定阈值,得到第三判断结果;
28、若所述第三判断结果为是,则所述相处于合闸状态;
29、若所述第三判断结果为否,则所述相处于分闸状态;
30、若所述三相刀闸的所有相均处于合闸状态,则所述三相刀闸的位置状态为合闸状态。
31、可选的,根据所述第二距离序列以及基准值得到所述三相刀闸的位置状态,具体包括:
32、对于所述三相刀闸中的任意一相,计算在每次更新当前时刻后获取第一激光测距仪到所述三相刀闸中所述相接触点的距离与分闸基准值的差值是否均小于第三设定阈值,得到第三判断结果;
33、若所述第三判断结果为是,则所述相处于分闸状态;
34、若所述第三判断结果为否,则所述相处于合闸状态;
35、若所述三相刀闸的所有相均处于分闸状态,则所述三相刀闸的位置状态为分闸状态。
36、一种基于激光测距数理统计的刀闸位置状态判断装置,包括:激光测距仪模块和mcu,所述激光测距仪模块用于测量激光测距仪模块到三相刀闸中各相接触点的距离,并将所述距离发送给所述mcu,所述mcu用于根据所述距离确定三相刀闸的位置状态。
37、可选的,基于激光测距仪的刀闸位置状态判断装置,还包括:rs485通信模块、以太网通信模块、上位机系统、rs485通信配置口和温度传感器;
38、所述激光测距仪模块与所述rs485通信模块连接,所述rs485通信模块、rs485通信配置口、所述温度传感器、所述以太网通信模块均与所述mcu连接,所述以太网通信模块与所述上位机系统连接。
39、可选的,所述激光测距仪模块包括三个激光传感器各激光传感器均与所述rs485通信模块连接。
40、可选的,基于激光测距仪的刀闸位置状态判断装置,还包括:电源转换模块和电源指示模块,所述电源转换模块分别与所述激光测距模块、所述rs485通信配置口、所述温度传感器和所述电源指示模块连接。
41、根据本发明提供的具体实施例,本发明公开了以下技术效果:
42、本发明采用激光测距仪测量其与刀闸接触点的距离,根据距离判断三相刀闸的位置状态,避免了测量过程中电磁的干扰,不会产生测量失效的情况。
技术特征:
1.一种基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,包括:
2.根据权利要求1所述的基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,获取设定时间段内各时刻下测量的距离得到第一距离序列,具体包括:
3.根据权利要求2所述的基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,根据所述第一距离序列判断所述三相刀闸是否处于静止状态,具体包括:
4.根据权利要求1所述的基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,多次更新当前时刻,并在每次更新当前时刻后获取距离得到第二距离序列,具体包括:
5.根据权利要求4所述的基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,根据所述第二距离序列以及基准值得到所述三相刀闸的位置状态,具体包括:
6.根据权利要求4所述的基于激光测距数理统计的刀闸位置状态判断方法,其特征在于,根据所述第二距离序列以及基准值得到所述三相刀闸的位置状态,具体包括:
7.一种基于激光测距数理统计的刀闸位置状态判断装置,其特征在于,包括:激光测距仪模块和mcu,所述激光测距仪模块用于测量激光测距仪模块到三相刀闸中各相接触点的距离,并将所述距离发送给所述mcu,所述mcu用于根据所述距离确定三相刀闸的位置状态。
8.根据权利要求7所述的基于激光测距仪的刀闸位置状态判断装置,其特征在于,还包括:rs485通信模块、以太网通信模块、上位机系统、rs485通信配置口和温度传感器;
9.根据权利要求8所述的基于激光测距仪的刀闸位置状态判断装置,其特征在于,所述激光测距仪模块包括三个激光传感器各激光传感器均与所述rs485通信模块连接。
10.根据权利要求8所述的基于激光测距仪的刀闸位置状态判断装置,其特征在于,还包括:电源转换模块和电源指示模块,所述电源转换模块分别与所述激光测距模块、所述rs485通信配置口、所述温度传感器和所述电源指示模块连接。
技术总结
本发明公开一种基于激光测距数理统计的刀闸位置状态判断方法及装置,涉及刀闸状态检测技术领域。所述方法包括:获取设定时间段内各时刻下测量的距离得到第一距离序列;根据第一距离序列判断三相刀闸是否处于静止状态,得到第一判断结果;若第一判断结果为是,则多次更新当前时刻,并在每次更新当前时刻后获取距离得到第二距离序列;根据第二距离序列以及基准值得到三相刀闸的位置状态;基准值为合闸基准值或者分闸基准值;位置状态为合闸状态或者分闸状态;若第一判断结果为否,则更新当前时刻并返回获取设定时间段内各时刻下测量的距离得到第一距离序列的步骤。本发明可避免产生测量失效的情况。
技术研发人员:万军,姜伟
受保护的技术使用者:广州能信数字科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!