一种高压架空线路除冰机器人的制作方法
本发明涉及线缆除冰,特别涉及一种高压架空线路除冰机器人。
背景技术:
1、每年寒流时,冻雨地区的输电线路会在导线上形成厚重且坚硬的覆冰,致使导线的重量剧增,使导线弧垂严重,影响导线的安全距离,更有甚者,导线还会因为不堪重负而发生断裂甚至使杆塔倒塌,危及输电安全。
2、目前比较高效且效果显著的直流融冰技术,因为技术限制,需要在除冰作业时将线路退运,而且无法对避雷线上的覆冰进行处理。
3、为了对高压架空线路进行除冰,部分厂商设计出一些除冰器,这类除冰器可见于如中国专利公告号为cn104104048b公开的一种除冰器,通过采用电磁振动器振动以敲击线状物体上的覆冰。一方面,这种除冰器需要人工将除冰器挂接在线状物体上,挂接难度大,操作极为不便,虽然市面上有一些除冰产品可以实现自动上线,但是需要在杆塔上改造专用的导轨,大范围铺设成本高,且并非适合所有工况;另一方面,上述除冰器是通过电磁振动器振动敲击线状物体的方式除冰,只能对于附着在高压架空线路受到敲击一侧的冰块除去,除冰效果不足。因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种高压架空线路除冰机器人,以解决现有技术的除冰器挂接难度大以及除冰效果不足的问题。
2、一种高压架空线路除冰机器人,包括:
3、机器人本体;
4、卷扬机构,安装于所述机器人本体,包括可搭接于高压架空线路的绳索和用于卷绕所述绳索的卷筒;
5、下行走机构,安装于所述机器人本体,包括可通过卷扬机构提升至高压架空线路下端并行走于高压架空线路下端的下防滑轮;
6、摆动伸缩机构,包括转动设于所述机器人本体侧面的摆臂和安装于所述摆臂的伸缩调整装置;
7、上行走机构,安装于所述伸缩调整装置的输出端,包括可通过所述摆动伸缩机构调整至高压架空线路上端并行走于高压架空线路上端的上防滑轮。
8、具体的,所述卷扬机构还包括安装于所述机器人本体中的第一转动驱动装置,所述第一转动驱动装置的转动轴与所述卷筒传动连接。
9、具体的,所述摆动伸缩机构还包括安装于所述机器人本体中的第二转动驱动装置,所述第二转动驱动装置的转动轴与所述摆臂传动连接。
10、具体的,所述机器人本体上端还设有多个防冰罩,所述防冰罩具有弧形导流部。
11、具体的,所述上防滑轮与下防滑轮沿垂直方向的间距可通过伸缩调整装置进行调整,使得经过两者的高压架空线路至少有一段形成弯曲。
12、具体的,所述上行走机构还包括滑块、沿竖向固定于所述滑块的上轮驱动电机、与所述上轮驱动电机输出轴传动连接的第一斜齿轮、与所述第一斜齿轮啮合的第二斜齿轮、与所述第二斜齿轮传动连接的转轴,所述滑块固定于所述伸缩调整装置的输出端,所述上防滑轮与所述转轴传动连接。
13、具体的,所述除冰机器人还包括振动机构,所述振动机构包括安装于所述机器人本体内的底座、安装于所述底座的振动电机,所述下行走机构还包括支架,所述下防滑轮转动设于所述支架,所述振动电机的输出端与所述支架固定连接。
14、具体的,所述下行走机构还包括下轮驱动电机,所述下轮驱动电机固定于所述支架,所述下防滑轮与所述下轮驱动电机的驱动轴传动连接。
15、具体的,所述支架设有用于感应高压架空线路的光电传感器,所述机器人本体上还设有摄像头,所述摄像头的摄像端朝向所述下防滑轮上方。
16、具体的,所述上防滑轮、下防滑轮表面均设有若干防滑齿。
17、本发明的有益效果:
18、本发明的除冰机器人,增加了卷扬机构,可先利用无人机等辅助设备,将卷扬机构的绳索的一端跨过高压架空线路,使得绳索搭接于高压架空线路,再将绳索的端部通过另一个卷筒收卷,收卷时提升机器人本体的高度,并使下防滑轮提升至高压架空线路下端,操作简单;还设置了摆动伸缩机构,将上行走机构安装于伸缩调整装置的输出端,利用摆动伸缩机构将上防滑轮调整至高压架空线路上端,实现上防滑轮的自动定位,无需人工操作;而且通过设置上行走机构、下行走机构和振动机构,上行走机构包括上防滑轮,下行走机构包括下防滑轮,上防滑轮与下防滑轮在高压架空线路上行走时,能够分别将高压架空线路上下两端的覆冰压碎,此外,在行走的同时再开启振动电机,通过振动电机振动,使碎冰掉落,进一步提高了除冰效果,而且将振动电机设于机器人本体内,将下行走机构安装于振动电机的输出端,使得整个振动除冰装置的体积更小,结构更加紧凑。
技术特征:
1.一种高压架空线路除冰机器人,其特征在于,包括:
2.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述卷扬机构(40)还包括安装于所述机器人本体(10)中的第一转动驱动装置(43),所述第一转动驱动装置(43)的转动轴与所述卷筒(42)传动连接。
3.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述摆动伸缩机构(60)还包括安装于所述机器人本体(10)中的第二转动驱动装置(63),所述第二转动驱动装置(63)的转动轴与所述摆臂(61)传动连接。
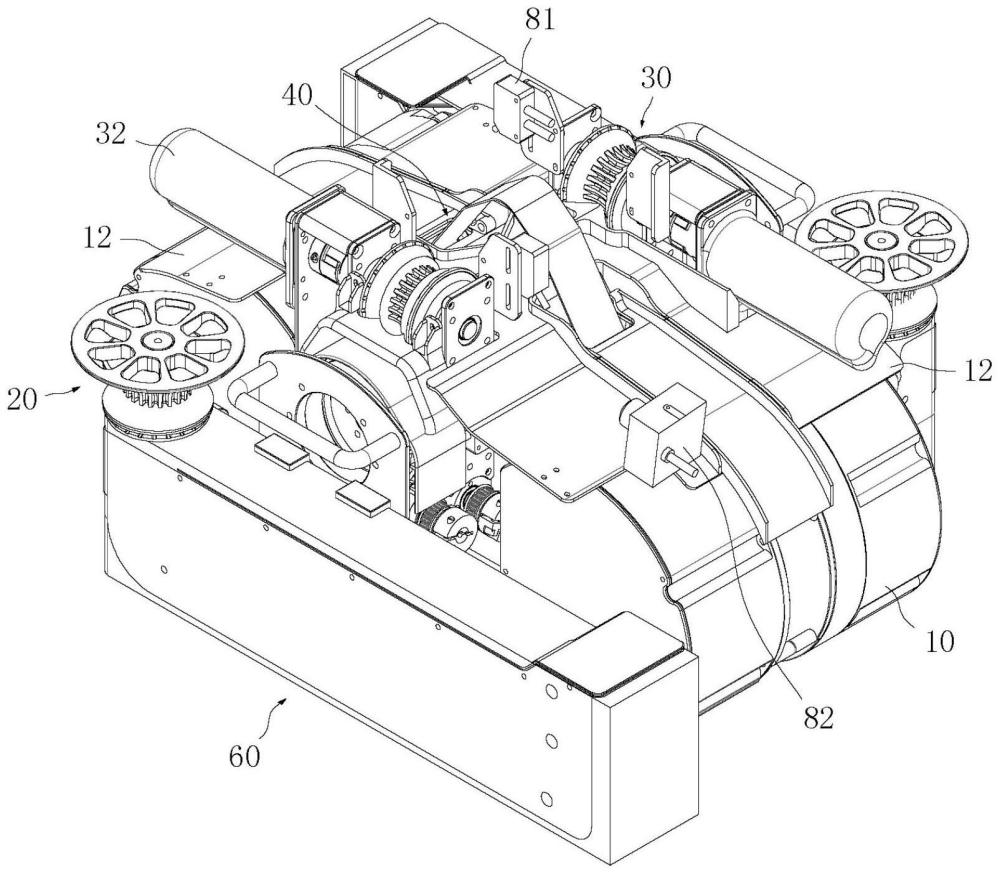
4.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述机器人本体(10)上端还设有多个防冰罩(12),所述防冰罩(12)具有弧形导流部。
5.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述上防滑轮(21)与下防滑轮(31)沿垂直方向的间距可通过伸缩调整装置(62)进行调整,使得经过两者的高压架空线路(70)至少有一段形成弯曲。
6.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述上行走机构(20)还包括滑块(22)、沿竖向固定于所述滑块(22)的上轮驱动电机(23)、与所述上轮驱动电机(23)输出轴传动连接的第一斜齿轮(24)、与所述第一斜齿轮(24)啮合的第二斜齿轮(25)、与所述第二斜齿轮(25)传动连接的转轴(26),所述滑块(22)固定于所述伸缩调整装置(62)的输出端,所述上防滑轮(21)与所述转轴(26)传动连接。
7.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述除冰机器人还包括振动机构(90),所述振动机构(90)包括安装于所述机器人本体(10)内的底座(92)、安装于所述底座(92)的振动电机(91),所述下行走机构(30)还包括支架(33),所述下防滑轮(31)转动设于所述支架(33),所述振动电机(91)的输出端与所述支架(33)固定连接。
8.根据权利要求7所述的一种高压架空线路除冰机器人,其特征在于,所述下行走机构(30)还包括下轮驱动电机(32),所述下轮驱动电机(32)固定于所述支架(33),所述下防滑轮(31)与所述下轮驱动电机(32)的驱动轴传动连接。
9.根据权利要求7所述的一种高压架空线路除冰机器人,其特征在于,所述支架(33)设有用于感应高压架空线路(70)的光电传感器(81),所述机器人本体(10)上还设有摄像头(82),所述摄像头(82)的摄像端朝向所述下防滑轮(31)上方。
10.根据权利要求1所述的一种高压架空线路除冰机器人,其特征在于,所述上防滑轮(21)、下防滑轮(31)表面均设有若干防滑齿。
技术总结
本发明涉及线缆除冰技术领域,具体公开了一种高压架空线路除冰机器人,增加了卷扬机构用以提升高度,并使下防滑轮提升至高压架空线路下端,操作简单;还设置了摆动伸缩机构,利用摆动伸缩机构将上防滑轮调整至高压架空线路上端,实现上防滑轮的自动定位,无需人工操作;而且通过设置上行走机构、下行走机构和振动机构,上防滑轮与下防滑轮在高压架空线路上行走时,能够分别将高压架空线路上下两端的覆冰压碎,此外,在行走的同时再开启振动电机,通过振动电机振动,使碎冰掉落,进一步提高了除冰效果,而且将振动电机设于机器人本体内,将下行走机构安装于振动电机的输出端,使得整个振动除冰装置的体积更小,结构更加紧凑。
技术研发人员:魏远航,黄志建,莫剑波
受保护的技术使用者:广东冠能电力科技发展有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!