本申请涉及水下测距,具体而言,涉及一种驱动单元、水下测距系统及水下机器人。
背景技术:
1、泳池清扫机器人在水下清扫前,会进行泳池建模以及对路径规划;并且在进行水下清扫时,会对行驶路径进行矫正,其中包括方向控制以及障碍规避等。此时,需要泳池清扫机器人实时获取泳池的数据。为了实现此功能,通过采用超声测距产品,使得超声测距产品与主板进行uart通讯,以获得泳池清扫机器人与泳池池壁的距离。
2、但是现有的超声测距产品响应速度慢,无法准确传输当前泳池清扫机器人与泳池池壁的距离数据;并且因结构限制,无法进行对距离数据进行详细分析;且测量距离较短,成本又较高。
3、因此,提出使用压电陶瓷来实现水下测距功能,以解决响应速度慢、测量距离短的问题,但是需要有高频率的方波作用于压电陶瓷正负极,才能使压电陶瓷在所需情况下震动,以实现测距功能;但是若使用水下机器人的微控制器的脉冲宽度调制波驱动压电陶瓷,则会造成压电陶瓷电压过低而无法正常工作。
4、在所述背景技术部分公开的上述信息仅用于加强对本申请的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了解决上述问题中的至少一个,本申请提出一种驱动单元、水下测距系统及水下机器人。
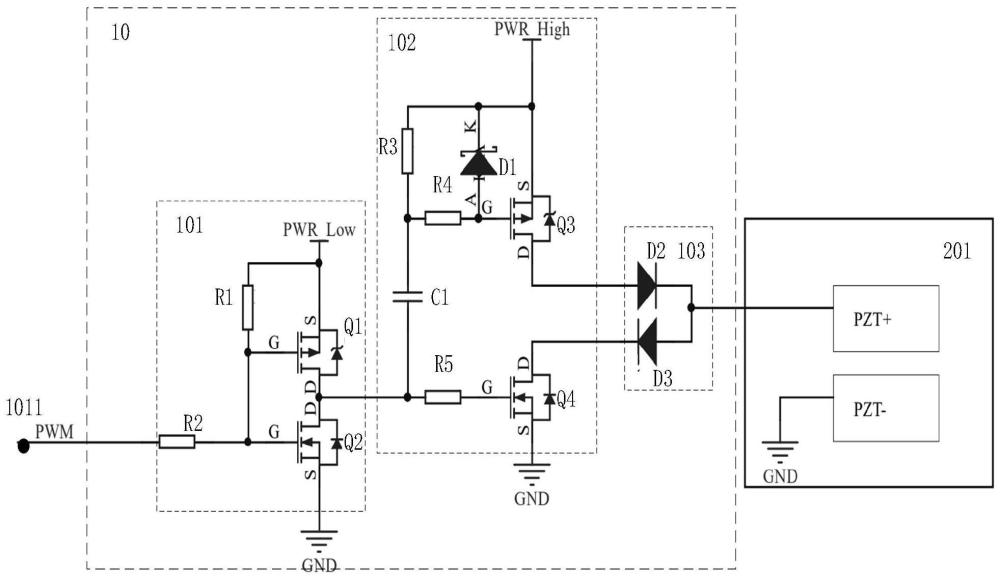
2、根据本申请的第一方面,本申请的至少一个实施例提供了一种驱动单元,用于压电陶瓷,包括:波形判断电路,用于接收脉冲宽度调制波,并根据所述脉冲宽度调制波的高电平或低电平,导通对应的开关管;供电电路,与所述波形判断电路连接;泄放电路,一端与所述供电电路连接,另一端与所述压电陶瓷连接;所述供电电路用于根据所述波形判断电路的开关管导通或关断的情况,导通对应的开关管,以通过所述泄放电路给所述压电陶瓷供电或者停止供电。
3、例如,在本申请的一些实施例中,所述波形判断电路包括:第一开关管,所述第一开关管的源极连接第一供电电源;第二开关管,所述第二开关管的漏极与所述第一开关管的漏极连接,栅极与所述第一开关管的栅极连接,源极接地;第一电阻,所述第一电阻与所述第一开关管的栅极和源极并联;第二电阻,所述第二电阻的一端与接收所述脉冲宽度调制波的输入端连接,另一端与所述第二开关管的栅极连接。
4、例如,在本申请的一些实施例中,所述供电电路包括:第三开关管,所述第三开关管的源极连接第二供电电源,漏极与所述泄放电路连接;第四开关管,所述第四开关管的源极接地,漏极与所述泄放电路连接;第一二极管,所述第一二极管的正极连接所述第三开关管的栅极,负极连接所述第三开关管的源极;第三电阻,所述第三电阻的一端与所述第三开关管的源极连接;第四电阻,所述第四电阻的一端连接所述第三电阻的另一端,另一端连接所述第三开关管的栅极;第一电容,所述第一电容的一端连接所述第三电阻和所述第四电阻串联连接的中点,另一端连接所述第一开关管的漏极;第五电阻,所述第五电阻的一端连接所述第一开关管的漏极,另一端连接所述第四开关管的栅极。
5、例如,在本申请的一些实施例中,在所述波形判断电路未收到脉冲宽度调制波的情况下,所述第一开关管关断,所述第二开关管导通,所述第四开关管关断,所述第三开关管关断,所述供电电路不给所述压电陶瓷供电。
6、例如,在本申请的一些实施例中,在所述波形判断电路收到的脉冲宽度调制波为低电平的情况下,所述第一开关管导通,所述第二开关管关断,所述第三开关管关断,所述第四开关管导通,所述供电电路不给所述压电陶瓷供电。
7、例如,在本申请的一些实施例中,在所述波形判断电路收到的脉冲宽度调制波为高电平的情况下,所述第一开关管关断,所述第二开关管导通,所述第四开关管关断,所述第三开关管导通,所述供电电路给所述压电陶瓷供电。
8、例如,在本申请的一些实施例中,在所述波形判断电路收到的脉冲宽度调制波为低电平的情况下,所述第一电容通过所述第三电阻向所述第二供电电源放电,并且所述第一电容与第三电阻连接端的电压大于所述第二供电电源的电压。
9、例如,在本申请的一些实施例中,所述泄放电路包括:第二二极管,所述第二二极管的正极连接所述第三开关管的漏极,负极连接所述压电陶瓷;第三二极管,所述第三二极管的负极连接所述第四开关管的漏极,正极连接所述第三开关管的负极。
10、根据本申请的第二方面,本申请的至少一个实施例提供了一种水下测距系统,包括:如第一方面中任一项所述的驱动单元;压电陶瓷,与所述驱动单元连接,以接收所述驱动单元的供电,实现水下测距功能。
11、根据本申请的第三方面,提出一种水下机器人,包括:如第二方面所述的水下测距系统。
12、本申请提供的一种驱动单元,通过设置驱动单元将压电陶瓷的驱动电压和控制波形分离,使得压电陶瓷能够正常工作;驱动单元电路结构简单,稳定性高;且只需要脉冲宽度调制波即可实现对压电陶瓷的控制,驱动方式简单。
13、本申请还提供一种水下测距系统,压电陶瓷可以快速响应且获得远距离测量数据,及时获得水下距离数据,提高水下测距系统测量数据的精准度。
14、本申请还提供一种水下机器人,水下测距系统中的驱动电路结构简单,体积较小,且压电陶瓷体积较小,所以水下测距系统体积也较小,因此在同样的体积条件下水下机器人可以设置更准确的数据分析微处理器,对水下测距系统获取的水下距离数据进行详细分析,提高水下测距水平。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:1.一种驱动单元,用于压电陶瓷,其特征在于,包括:
2.如权利要求1所述的驱动单元,其特征在于,所述波形判断电路包括:
3.如权利要求2所述的驱动单元,其特征在于,所述供电电路包括:
4.如权利要求3所述的驱动单元,其特征在于,
5.如权利要求3所述的驱动单元,其特征在于,
6.如权利要求3所述的驱动单元,其特征在于,
7.如权利要求5所述的驱动单元,其特征在于,
8.如权利要求1所述的驱动单元,其特征在于,所述泄放电路包括:
9.一种水下测距系统,其特征在于,包括:
10.一种水下机器人,其特征在于,包括:
技术总结本申请提供一种驱动单元、水下测距系统及水下机器人。驱动单元包括:波形判断电路,用于接收脉冲宽度调制波,并根据所述脉冲宽度调制波的高电平或低电平,导通对应的开关管;供电电路,与所述波形判断电路连接;泄放电路,一端与所述供电电路连接,另一端与所述压电陶瓷连接;所述供电电路用于根据所述波形判断电路的开关管导通或关断的情况,导通对应的开关管,以通过所述泄放电路给所述压电陶瓷供电或者停止供电。通过设置驱动单元将压电陶瓷的驱动电压和控制波形分离,使得压电陶瓷能够正常工作;驱动单元电路结构简单,稳定性高;且只需要脉冲宽度调制波即可实现对压电陶瓷的控制,驱动方式简单。
技术研发人员:周加旺,李伟,孙冬,张会超,张猛
受保护的技术使用者:深之蓝(天津)水下智能科技有限公司
技术研发日:技术公布日:2024/6/20