一种线控转向系统及其双三相电机容错控制方法与流程
本发明涉及转向系统,更具体的说是涉及一种线控转向系统及其双三相电机容错控制方法。
背景技术:
1、线控转向系统是线控底盘的核心部件之一,双三相电机相对于传统三相电机而言有着,可有效降低开关器件电流,电压等级,静态性能良好,控制灵活度高,故障运行能力强等优点。被认为是线控转向系统的首选,随之而来的问题是如何准确识别电机故障并进行有效的容错控制,针对该问题,先后出现了一些应对方法。一种将含故障相的子绕组和一整套逆变器装置完全切除,剩下另一套三相绕组和逆变器运行;另一种处理方式就是仅需切除故障相绕组及其对应的逆变器支路,剩下五相绕组和五相变流器支路,将出现缺相故障的那一套绕组单独进行容错控制,通过调节剩余两相电流的幅值与相位以维持单套绕组磁势的不变,而另一套绕组则处于正常矢量控制状态;对于电机故障诊断,则有跨极式探测线圈的pmsm故障诊断方法,基于电压直流分量的永磁同步电机匝间短路故障诊断方法,基于电流残差信号的pmsm匝间短路故障诊断方法。上述方案在控制过程中忽略了当双三相电机进行容错控制时,出现故障的那套绕组剩余两项电流会比较大,这对于开关器件是极为不利的,在电机故障检测时,观测器在电机功况变化的情况下,其增益系数可能不是最优,估测准确度不够高。对电机的性能和寿命会产生不利影响。
技术实现思路
1、有鉴于此,本发明提供了。
2、为了实现上述目的,本发明采用如下技术方案:
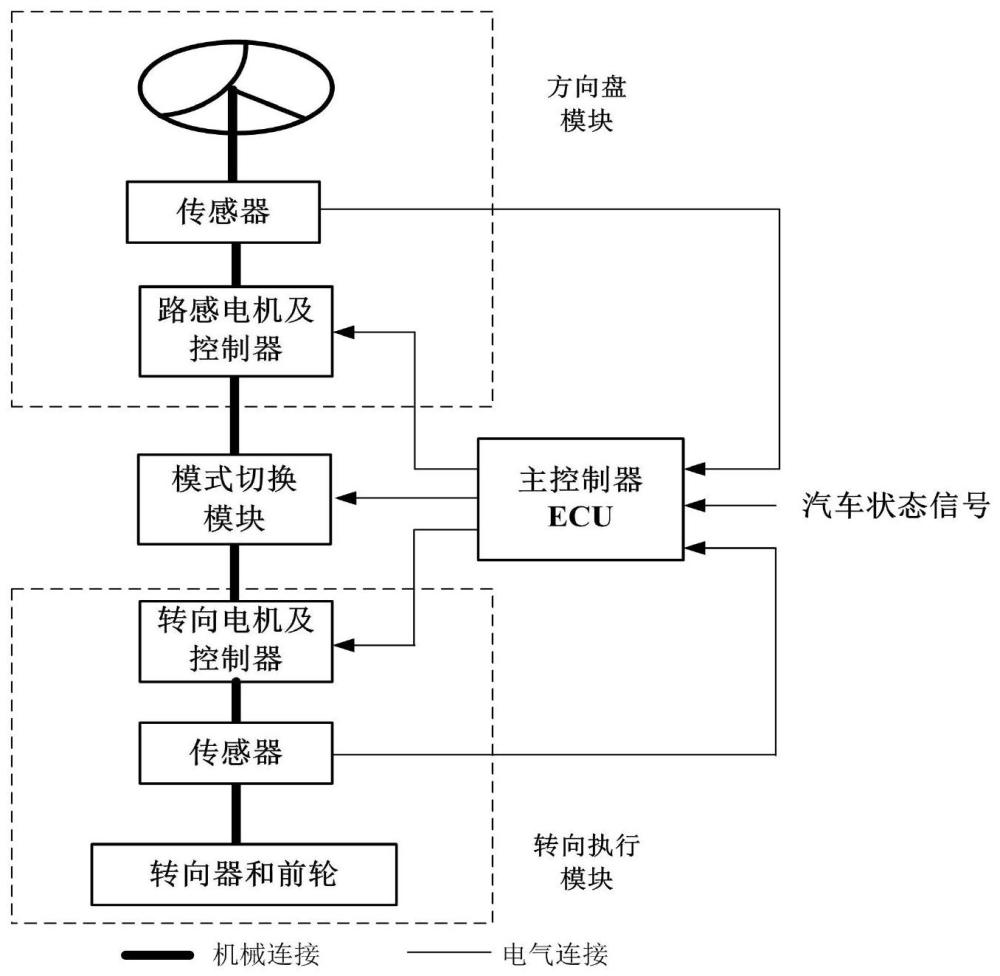
3、一种线控转向系统,包括:第一传感器和所述路感电机及控制器连接并设置于方向盘模块;模式切换模块连接方向盘模块与转向执行模块;转向执行模块包括依次连接的转向电机及控制器,第二传感器,转向器和前轮;路感电机及控制器、模式切换模块和转向电机及控制器分别与主控制器连接。
4、利用一种线控转向系统的双三相电机容错控制方法,包括以下步骤:
5、对双三相永磁同步电机进行矢量控制,矢量控制包括clark变换、park变换、反park变换、svpwm;
6、如果pmsm的其中一相断开,进行双三相电机的容错控制;
7、在双三相电机的驱动系统中,采用两个逆变器并联的对等控制方式,通过转速下垂方法以实现各个逆变器的功率分配。
8、可选的,矢量控制采用id=0控制,通过对逆变器电流ia、ib、ic、ix、iy、iz的采集,经过clark变换得到iα、iβ、iα2、iβ2,再park变换得到的id、iq、id2、iq2反馈到d-q电流pi控制器中,形成电流闭环,并经过反park变换输出uα、uβ、uα2、uβ2
9、可选的,在容错控制中,保持故障前后的运行状态不变,b,c相电流的幅值扩大√3倍,中性线电流幅值是b,c相的√3倍,电流相位差由120°变为60°。
10、经由上述的技术方案可知,与现有技术相比,本发明提供了一种线控转向系统及其双三相电机容错控制方法,具有以下有益效果:
11、1.避免了电机故障那套绕组电流过大的问题。减轻了电机电子元器件的负担,提高了电机寿命。
12、2.有效改善了故障检测时观测器的估测准确度,降低了观测值误差,在不同估计误差下,给予控制器不同的增益,提高系统动态稳定性。
技术特征:
1.一种线控转向系统,其特征在于,包括:第一传感器和所述路感电机及控制器连接并设置于方向盘模块;模式切换模块连接方向盘模块与转向执行模块;转向执行模块包括依次连接的转向电机及控制器,第二传感器,转向器和前轮;路感电机及控制器、模式切换模块和转向电机及控制器分别与主控制器连接。
2.利用权利要求1的一种线控转向系统的双三相电机容错控制方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的一种双三相电机容错控制方法,其特征在于,矢量控制采用id=0控制,通过对逆变器电流ia、ib、ic、ix、iy、iz的采集,经过clark变换得到iα、iβ、iα2、iβ2,再park变换得到的id、iq、id2、iq2反馈到d-q电流pi控制器中,形成电流闭环,并经过反park变换输出uα、uβ、uα2、uβ2。
4.根据权利要求2所述的一种双三相电机容错控制方法,其特征在于,在容错控制中,保持故障前后的运行状态不变,b,c相电流的幅值扩大√3倍,中性线电流幅值是b,c相的√3倍,电流相位差由120°变为60°。
技术总结
本发明公开了一种线控转向系统及其双三相电机容错控制方法,涉及转向系统技术领域。包括:第一传感器和所述路感电机及控制器连接并设置于方向盘模块;模式切换模块连接方向盘模块与转向执行模块;转向执行模块包括依次连接的转向电机及控制器,第二传感器,转向器和前轮;路感电机及控制器、模式切换模块和转向电机及控制器分别与主控制器连接。本发明避免了电机故障那套绕组电流过大的问题。减轻了电机电子元器件的负担,提高了电机寿命。有效改善了故障检测时观测器的估测准确度,降低了观测值误差,在不同估计误差下,给予控制器不同的增益,提高系统动态稳定性。
技术研发人员:李贵远,梁修林,郭中阳,束琦,吴竟启,郭永荔
受保护的技术使用者:江苏超力电器有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!