感应电机无位置传感器的磁链监测方法、装置及设备与流程
本发明涉及电机检测,尤其涉及一种感应电机无位置传感器的磁链监测方法、装置及设备。
背景技术:
1、目前,感应电机无位置传感器凭借驱动低成本、高可靠性和维护简单、方便等优势,使得无位置传感器控制算法在工业应用中越来受到重视。对于无位置传感器控制的关键就在于磁链信息的获取和转速的准确辨识,特别是获取转子磁链相位信息是实现感应电机高性能矢量控制的必要条件。虽然国内外很多学者都已提出了解决策略来确保转速辨识的稳定性,但是对于转子磁链定向的矢量控制而言,磁链相位估算在电机参数不匹配时的鲁棒稳定性问题几乎未被考虑。此外,由于转速自适应辨识方案通常利用的是估算转子磁链而不是实际磁链,这又会造成估算得到的转速的鲁棒稳定性降低,影响了获取到的转速的准确性。因此,现有技术中通过感应电机无位置传感器实现磁链监测的技术方法存在准确性较差的问题。
技术实现思路
1、本发明实施例提供了一种感应电机无位置传感器的磁链监测方法、装置及设备,旨在解决现有技术方法中通过感应电机无位置传感器实现磁链监测的方法所存在的准确性较差的问题。
2、第一方面,本发明实施例提供了一种感应电机无位置传感器的磁链监测方法,所述方法应用于控制终端中,所述控制终端与感应电机、全阶自适用观测器及反馈矩阵进行通信连接,其中,感应电机的两个输入端分别连接交流电的两组相线,全阶自适用观测器的两个输入端也分别连接所述交流电的两组相线,所述感应电机的两个输出端分别连接第一加减法计算器的第一输入端及第二加减法计算器的第一输入端;所述全阶自适用观测器的两个电流输出端分别连接所述第一加减法计算器的第二输入端及所述第二加减法计算器的第二输入端;所述全阶自适用观测器的两个磁链输出端分别连接第一乘法计算器的第一输入端及第二乘法计算器的第一输入端;所述第一加减法计算器的输出端分别连接所述第二乘法计算器的第二输入端及反馈矩阵的第一输入端;所述第二加减法计算器的输出端分别连接所述第一乘法计算器的第二输入端及所述反馈矩阵的第二输入端;所述第一乘法计算器的输出端及所述第二乘法计算器的输出端分别连接第三加减法计算器的两个输入端,所述第三加减法计算器的输出端连接自适应机构的输入端;所述自适应机构的输出端同时连接所述全阶自适用观测器的控制输入端及所述反馈矩阵的第三输入端;所述反馈矩阵的输出端连接所述全阶自适用观测器的第三输入端,其中,所述方法包括:
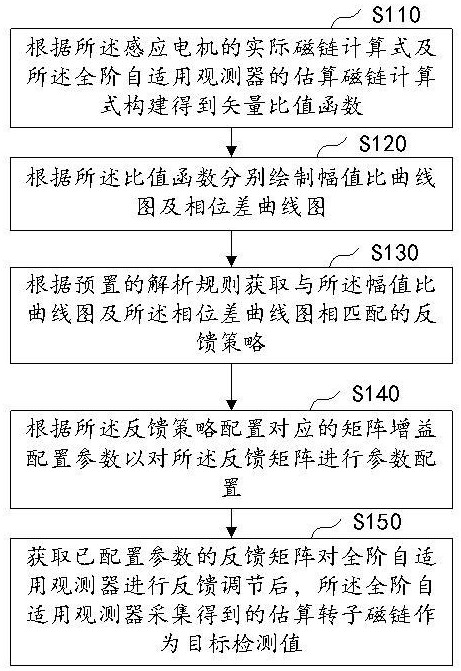
3、根据所述感应电机的实际磁链计算式及所述全阶自适用观测器的估算磁链计算式构建得到矢量比值函数;
4、根据所述比值函数分别绘制幅值比曲线图及相位差曲线图;
5、根据预置的解析规则获取与所述幅值比曲线图及所述相位差曲线图相匹配的反馈策略;
6、根据所述反馈策略配置对应的矩阵增益配置参数以对所述反馈矩阵进行参数配置;
7、获取已配置参数的反馈矩阵对全阶自适用观测器进行反馈调节后,所述全阶自适用观测器采集得到的估算转子磁链作为目标检测值。
8、第二方面,本发明实施例还提供了一种感应电机无位置传感器的磁链监测装置,所述装置配置于控制终端中,其中,所述装置用于执行如上述第一方面所述的感应电机无位置传感器的磁链监测方法,所述装置包括:
9、矢量比值函数构建单元,用于根据所述感应电机的实际磁链计算式及所述全阶自适用观测器的估算磁链计算式构建得到矢量比值函数;
10、曲线图获取单元,用于根据所述比值函数分别绘制幅值比曲线图及相位差曲线图;
11、反馈策略获取单元,用于根据预置的解析规则获取与所述幅值比曲线图及所述相位差曲线图相匹配的反馈策略;
12、参数配置单元,用于根据所述反馈策略配置对应的矩阵增益配置参数以对所述反馈矩阵进行参数配置;
13、目标检测值获取单元,用于获取已配置参数的反馈矩阵对全阶自适用观测器进行反馈调节后,所述全阶自适用观测器采集得到的估算转子磁链作为目标检测值。
14、第三方面,本发明实施例还提供了一种计算机设备,其中,所述设备包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口、存储器通过通信总线完成相互间的通信;
15、存储器,用于存放计算机程序;
16、处理器,用于执行存储器上所存放的程序时,实现上述第一方面所述的感应电机无位置传感器的磁链监测方法的步骤。
17、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如上述第一方面所述的感应电机无位置传感器的磁链监测方法的步骤。
18、本发明实施例提供了一种感应电机无位置传感器的磁链监测方法、装置及设备,方法包括:根据感应电机的实际磁链计算式及全阶自适用观测器的估算磁链计算式构建得到矢量比值函数;根据比值函数分别绘制幅值比曲线图及相位差曲线图;根据预置的解析规则获取与幅值比曲线图及相位差曲线图相匹配的反馈策略;根据反馈策略配置对应的矩阵增益配置参数以对反馈矩阵进行参数配置;获取全阶自适用观测器经过反馈调节后采集的估算转子磁链作为目标检测值。上述方法,在保证检测稳定性的前提下通过获取矩阵增益配置参数并对反馈矩阵进行参数配置,降低了估算转子磁链对电机参数变化的敏感性,从而大幅提高了对感应电机进行磁链监测的准确性,从而提高了基于磁链监测进行速度辨识的鲁棒稳定性。
技术特征:
1.一种感应电机无位置传感器的磁链监测方法,其特征在于,所述方法应用于控制终端中,所述控制终端与感应电机、全阶自适用观测器及反馈矩阵进行通信连接,其中,感应电机的两个输入端分别连接交流电的两组相线,全阶自适用观测器的两个输入端也分别连接所述交流电的两组相线,所述感应电机的两个输出端分别连接第一加减法计算器的第一输入端及第二加减法计算器的第一输入端;所述全阶自适用观测器的两个电流输出端分别连接所述第一加减法计算器的第二输入端及所述第二加减法计算器的第二输入端;所述全阶自适用观测器的两个磁链输出端分别连接第一乘法计算器的第一输入端及第二乘法计算器的第一输入端;所述第一加减法计算器的输出端分别连接所述第二乘法计算器的第二输入端及反馈矩阵的第一输入端;所述第二加减法计算器的输出端分别连接所述第一乘法计算器的第二输入端及所述反馈矩阵的第二输入端;所述第一乘法计算器的输出端及所述第二乘法计算器的输出端分别连接第三加减法计算器的两个输入端,所述第三加减法计算器的输出端连接自适应机构的输入端;所述自适应机构的输出端同时连接所述全阶自适用观测器的控制输入端及所述反馈矩阵的第三输入端;所述反馈矩阵的输出端连接所述全阶自适用观测器的第三输入端,所述方法包括:
2.根据权利要求1所述的感应电机无位置传感器的磁链监测方法,其特征在于,所述根据预置的解析规则获取与所述幅值比曲线图及所述相位差曲线图相匹配的反馈策略,包括:
3.根据权利要求1所述的感应电机无位置传感器的磁链监测方法,其特征在于,所述根据所述反馈策略配置对应的矩阵增益配置参数以对所述反馈矩阵进行参数配置,包括:
4.根据权利要求2或3所述的感应电机无位置传感器的磁链监测方法,其特征在于,所述根据预置的解析规则获取与所述幅值比曲线图及所述相位差曲线图相匹配的反馈策略之前,还包括:
5.根据权利要求4所述的感应电机无位置传感器的磁链监测方法,其特征在于,所述根据所述第一转速值及所述第二转速值对所述解析规则中的转速区间进行配置,包括:
6.一种感应电机无位置传感器的磁链监测装置,其特征在于,所述装置配置于控制终端中,所述装置用于执行如权利要求1-5任一项所述的感应电机无位置传感器的磁链监测方法,所述装置包括:
7.根据权利要求6所述的感应电机无位置传感器的磁链监测装置,其特征在于,所述反馈策略获取单元,包括:
8.根据权利要求6所述的感应电机无位置传感器的磁链监测装置,其特征在于,所述参数配置单元,包括:
9.一种计算机设备,其特征在于,所述设备包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口、存储器通过通信总线完成相互间的通信;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5中任一项所述的感应电机无位置传感器的磁链监测方法的步骤。
技术总结
本发明公开了感应电机无位置传感器的磁链监测方法、装置及设备,方法包括:根据感应电机的实际磁链计算式及全阶自适用观测器的估算磁链计算式构建得到矢量比值函数;根据比值函数分别绘制幅值比曲线图及相位差曲线图;根据预置的解析规则获取与幅值比曲线图及相位差曲线图相匹配的反馈策略;根据反馈策略配置对应的矩阵增益配置参数以对反馈矩阵进行参数配置;获取全阶自适用观测器经过反馈调节后采集的估算转子磁链作为目标检测值。上述方法,在保证检测稳定性的前提下通过获取矩阵增益配置参数并对反馈矩阵进行参数配置,降低了估算转子磁链对电机参数变化的敏感性,从而大幅提高了对感应电机进行磁链监测及速度辨识的鲁棒稳定性。
技术研发人员:曾泳波,梁向辉
受保护的技术使用者:深圳艾为电气技术股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!