一种光伏清洁检测系统及其控制方法
本发明涉及机器人,具体为一种光伏清洁检测系统及其控制方法。
背景技术:
1、目前组件机械化自动清洁方式主要有小型面板清洁机器人、移动式清扫车和轨道式清洁机器人。小型面板清洁机器人无法实现自助越排,对于多排组件的大型光伏电站,这类机器人需要每排组件部署一台,机器人部署数量庞大。而移动式清扫车和轨道式清洁机器人硬件要求较高,且需要一对一定制,前期建设成本较高。为此,本申请提出一种基于超声和图像识别技术的分体式光伏清洁检测系统,清洁机器人和搬运机器人分开工作,两者配合协调,可实现光伏板清洁检测的完全自动化,两者共同作业适用于光伏地面站。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于超声和图像识别技术的分体式光伏清洁检测系统。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种光伏清洁检测系统包括搬运机器人和清洁机器人,所述清洁机器人在光伏玻璃板上工作,所述搬运机器人在光伏板空隙间运动,搬运清洁机器人来完成在不同光伏板上的移动。
3、优选的,所述搬运机器人包括超声波避障模块、导航定位模块、履带行走结构和收纳补给槽,所述超声波避障模块和导航定位模块配合用于确定搬运机器人的准确行走路线,所述履带行走结构来完成移动工作,所述收纳补给槽用于收纳清洁机器人。
4、优选的,所述搬运机器人包括污水沉淀回收结构、机械臂搬运结构、水箱一和蓄电池一。
5、优选的,所述机械臂搬运结构包含伺服电机、三自由度连杆结构、关节轴承、控制系统、视觉检测模块、半弧形配合限位组件。所述半弧形配合限位组件用于与清洁机器人限位组件相互配合,完成抓取,所述收纳补给槽包含充电触片、限位导轨槽、加水供给管路。所述限位导轨槽尺寸与清洁机器人为相符关系。清洁机器人通过限位导轨槽进入正确收纳位置。所述充电触片是给清洁机器人供电的触点,清洁机器人通过限位导轨槽与充电触片接触充电。所述水箱一与加水供给管路给清洁机器人供水。所述收纳补给槽下部开有排水孔,可将清洁机器人的污水通过排水孔排出,所述污水沉淀回收结构的顶端开设有进水口,与基站底部排水口连接,装置的内壁固定连接有过滤网,装置的顶端固定连接有转杆,转杆的底端固定连接有多个刮片。
6、优选的,所述清洁机器人包括红外视觉模块、超声水清洁模块、履带行走结构、滚刷结构、控制机构、水箱二、污水暂存盒、供水管道和蓄电池。
7、优选的,所述超声水清洁模块包含超声波换能器、超声波发生器、高压水喷头、供水通道、限位组件。所述超声波换能器通过限位组件贴附于供水管道四周,所述滚刷机构包括圆柱形滚刷、塑胶刮条、塑胶刮条通过限位组件可拆卸地固定于圆柱形滚刷后方紧贴于圆柱形滚刷,所述供水管道分别连接水箱一与超声水清洁模块、塑胶刮条与污水暂存盒。
8、优选的,所述搬运机器人可携带若干个清洁机器人,有若干个与清洁机器人相配套的收纳补给槽及其功能。
9、本发明还提供了光伏清洁检测系统的控制方法,包括以下步骤:
10、步骤一、搬运机器人携带若干清洁机器人移动到光伏板阵列附近第一位置,当距离小于清洁距离时停止运动。
11、步骤二、搬运机器人机械臂搬运模块开始运动,半弧形配合限位组件()与清洁机器人限位组件相互配合,从收纳补给槽中将清洁机器人搬运到光伏板阵列上。
12、步骤三、清洁机器人红外视觉模块计算自身与光伏板边缘相对位置,当调整到光伏板边角且与边角平行时开始按照既定蛇形路线清扫。
13、步骤四、清洁机器人在当前工作阵列上工作完毕后向搬运机器人发送数据信号,包括剩余水量、剩余电量、位置信息,搬运机器人回到第一位置,机械臂搬运模块运动,将清洁机器人搬运回收纳补给槽,并判断是否需要加水充电。
14、步骤五、清洁机器人污水暂存盒排水开关打开,污水流入污水沉淀回收装置,经过沉淀处理通过单向阀流入水箱一,以便回收利用。
15、步骤六、搬运机器人机械臂搬运机构收回,并运动到下一工作阵列附近第二位置,然后从步骤一开始循环重复,直至所有工作任务被完成。
16、与现有技术相比,本发明有效解决了现有光伏清洁机器人不能跨阵列清洁的缺点,既实现了无人化清洁,又提高了清洁效率,可以快速而准确地清洁光伏板表面的污垢和灰尘,且集成了红外成像检测技术,省去了人工检测的成本。相比传统的人工清洁检测方式,本发明能够大幅提高清洁效率,节省时间和人力成本。
技术特征:
1.一种光伏清洁检测系统,其特征在于:包括搬运机器人(100)和清洁机器人(200),所述清洁机器人(200)在光伏板上活动对光伏板做清洁工作,所述搬运机器人(100)帮助清洁机器人(200)完成不同光伏板之间的移动。
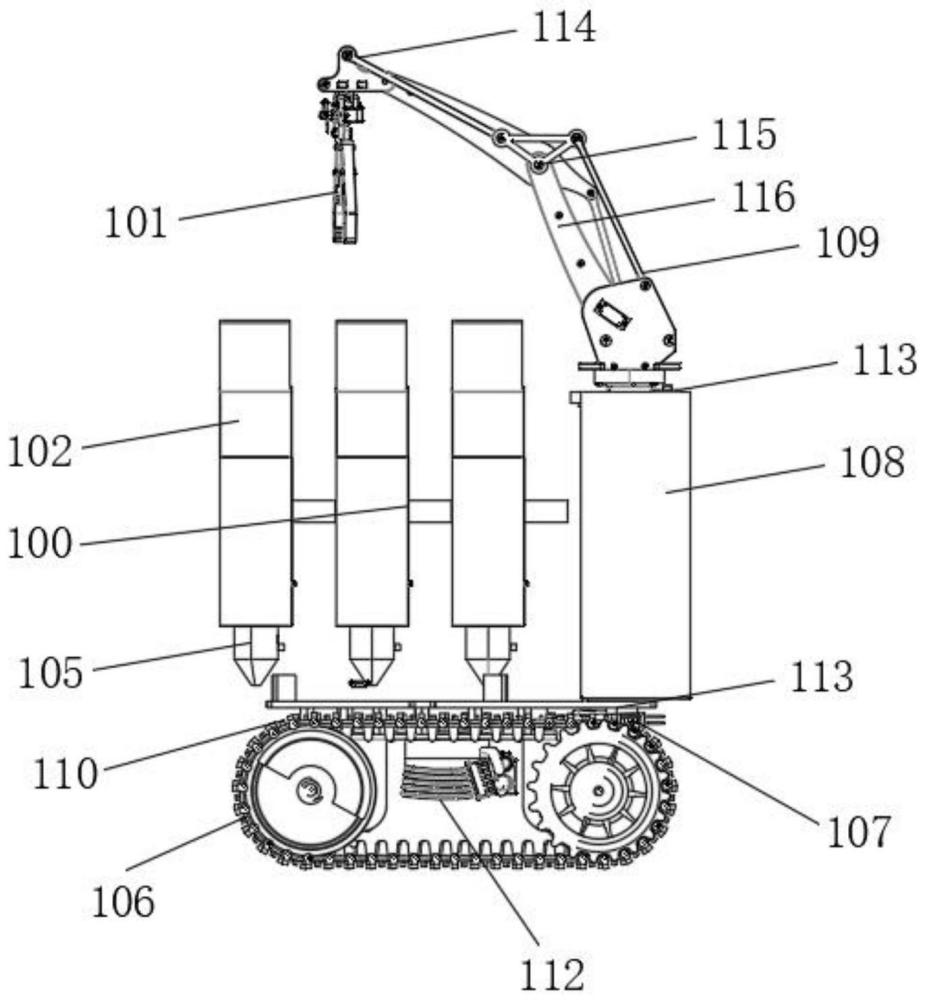
2.根据权利要求1所述的一种光伏清洁检测系统,其特征在于:所述搬运机器人(100)包括超声波避障模块(107)、导航定位模块(111)、履带行走结构(106)和收纳补给槽(102),所述超声波避障模块(107)和导航定位模块(111)配合用于确定搬运机器人(100)的准确行走路线,所述履带行走结构(106)来完成移动工作,所述收纳补给槽(102)用于收纳清洁机器人(100)。
3.根据权利要求2所述的一种光伏清洁检测系统,其特征在于:所述搬运机器人(100)包括污水沉淀回收结构(105)、机械臂搬运结构(109)、水箱一(108)和蓄电池一(112)。
4.根据权利要求1所述的一种光伏清洁检测系统,其特征在于:所述机械臂搬运结构(109)包含伺服电机(114)、三自由度连杆结构(116)、关节轴承(115)、控制系统(113)、视觉检测模块(110)、半弧形配合限位组件(101),所述半弧形配合限位组件(101)用于与清洁机器人限位组件相互配合,完成抓取,所述收纳补给槽(102)包含充电触片(301)、限位导轨槽(302)、加水供给管路(303),所述限位导轨槽(302)尺寸与清洁机器人为相符关系,清洁机器人通过限位导轨槽(302)进入正确收纳位置,所述充电触片(301)是给清洁机器人供电的触点,清洁机器人通过限位导轨槽(302)与充电触片(301)接触充电,所述水箱一(108)与加水供给管路(303)给清洁机器人供水,所述收纳补给槽(102)下部开有排水孔(304),可将清洁机器人的污水通过排水孔(304)排出,所述污水沉淀回收结构的顶端开设有进水口(305),与基站底部排水口(304)连接,装置的内壁固定连接有过滤网(306),装置的顶端固定连接有转杆(307),转杆的底端固定连接有多个刮片(308)。
5.根据权利要求1所述的一种光伏清洁检测系统,其特征在于:所述清洁机器人包括红外视觉模块(201)、超声水清洁模块(202)、履带行走结构(203)、滚刷结构(204)、控制机构(205)、水箱二(206)、污水暂存盒(207)、供水管道(208)和蓄电池(209)。
6.根据权利要求1所述的一种光伏清洁检测系统,其特征在于:所述超声水清洁模块包含超声波换能器(401)、超声波发生器(405)、高压水喷头(402)、供水通道(404)、限位组件(403),所述超声波换能器(401)通过限位组件(403)贴附于供水管道四周,所述滚刷机构包括圆柱形滚刷(211)、塑胶刮条(210)、塑胶刮条(210)通过限位组件可拆卸地固定于圆柱形滚刷(211)后方紧贴于圆柱形滚刷(211),所述供水管道(303)分别连接水箱一(108)与超声水清洁模块(202)、塑胶刮条(210)与污水暂存盒(207)。
7.根据权利要求1所述光伏清洁检测系统,其特征在于:所述搬运机器人(100)可携带若干个清洁机器人(200),有若干个与清洁机器人(200)相配套的收纳补给槽(102)及其功能。
8.一种光伏清洁检测系统的控制方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种光伏清洁检测系统及其控制方法,涉及机器人技术领域。包括搬运机器人和清洁机器人,所述清洁机器人在光伏玻璃板上工作,所述搬运机器人在光伏板空隙间运动,搬运清洁机器人来完成在不同光伏板上的移动。有效解决了现有光伏清洁机器人不能跨阵列清洁的缺点,既实现了无人化清洁,又提高了清洁效率,可以快速而准确地清洁光伏板表面的污垢和灰尘,且集成了红外成像检测技术,省去了人工检测的成本。相比传统的人工清洁检测方式,本发明能够大幅提高清洁效率,节省时间和人力成本。
技术研发人员:柯庆镝,王圣元,郑腮佳,童照翔
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/6/13
- 还没有人留言评论。精彩留言会获得点赞!