一种智能光伏清扫机器人、系统及其工作方法与流程
本发明涉及光伏清扫机器人,具体涉及一种智能光伏清扫机器人、系统及其工作方法。
背景技术:
1、随着目前清洁能源的大力发展,各类清洁能源逐渐走入大众视野。而其中,最为主要能源之一的光伏发电也越来越普及。光伏产业的不断发展,很多人也开始关注并且采用光伏发电系统。常规楼顶,戈壁滩,山坡,乡镇农田,渔田都可以见到越来越多的光伏板组。
2、然而,光伏发电的普及同时也面临了相关的很多问题。其中最主要的问题就是光伏板组的清洁。光伏板组表面的灰尘污垢会很大程度上降低发电效率,增加光伏板的温度,影响光伏板的寿命。对此,越来越多的厂家开始研发各式各类的光伏板组的清扫机器人。
3、现有的光伏清扫机器人产品也存在一些问题,其中主要的问题:
4、1、现有的光伏清扫机器人的兼容适应性较差,难以实现各尺寸规格光伏板组的适用性;
5、2、现有的光伏清扫机器人的环境适应性较差,难以适应山体、戈壁、屋顶、渔场-农场、海上等等场景环境;
6、3、现有的光伏清扫机器人难以实现小型轻量化,不方便机器人运输、安装和后期运维;
7、4、现有的光伏清扫机器人的人工智能化程度较低,难以实现全程无人化管理。
技术实现思路
1、本发明的目的是针对现有技术存在的不足,提供一种智能光伏清扫机器人、系统及其工作方法。
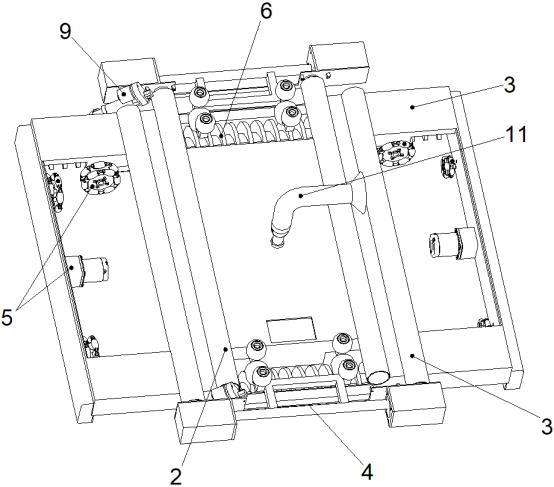
2、为实现上述目的,在第一方面,本发明提供了一种智能光伏清扫机器人,包括主体框架,所述主体框架的上侧固定连接有若干上限位伸缩杆和下限位伸缩杆,所述上限位伸缩杆和下限位伸缩杆的活动端部分别与一限位机构固定连接,两个限位机构分别用以与光伏板上下边框配合限位,所述限位机构上设有刹车机构,所述主体框架上设有驱动机构和清扫机构,所述驱动机构用以控制主体框架在光伏板上移动,所述清扫机构用以对光伏板的上表面进行清扫,所述主体框架的下侧通过第一伸缩控制件连接有吸盘组。
3、进一步的,所述上限位伸缩杆和下限位伸缩杆分别为两个,两个上限位伸缩杆和下限位伸缩杆分别呈间隔设置。
4、进一步的,所述限位机构包括固定在上限位伸缩杆和下限位伸缩杆的活动端部的连接架,所述连接架与轮架的一端可转动连接,所述轮架的另一端与安装在连接架上的翻转电机连接,所述轮架上设有限位轮组。
5、进一步的,每一限位机构上设有两组限位轮组,每组限位轮组为3个限位轮,3个限位轮呈u型状设置。
6、进一步的,所述驱动机构包括若干安装在主体框架上的驱动电机、驱动轮和从动轮,所述驱动轮设置主体框架任意相邻的两侧,所述从动轮设置在其余两侧,同侧的从动轮为两个以上,同侧的驱动轮为两个,所述驱动电机为两个,两个驱动电机分别设置在同侧的两个驱动轮之间,且其转轴与两个驱动轮分别传动连接。
7、进一步的,所述清扫机构包括安装在主体框架上的清扫电机和毛刷辊,所述毛刷辊为两个,两个毛刷辊分别设置在主体框架的上下两侧,所述清扫电机设置在两个毛刷辊之间。
8、进一步的,所述刹车机构包括倾斜固定在连接架上的第二伸缩控制件,所述第二伸缩控制件的下端铰接有垫块,两个垫块分别设置在光伏板上下边框的上侧。
9、进一步的,所述主体框架的两侧分别设有边缘检测传感器。
10、在第二方面,本发明提供了一种智能光伏清扫系统,包括调度无人机和上述的智能光伏清扫机器人,所述调度无人机的下侧中部设有机器人对接机构,所述智能光伏清扫机器人的上侧中部设有与机器人对接机构配合的无人机对接机构。
11、在第三方面,本发明提供了一种上述智能光伏清扫系统的工作方法,包括:
12、调度无人机与智能光伏清扫机器人对接后飞往指定的光伏板的上方,并将智能光伏清扫机器人放置在光伏板上,然后控制所述第一伸缩控制件伸出,以使所述吸盘组吸住光伏板,然后控制断开所述机器人对接机构与无人机对接机构之间的连接,并飞回库中或者执行其他任务;
13、控制所述上限位伸缩杆和下限位伸缩杆伸出,使得两个限位机构分别移动至光伏板上下边框的外侧,然后依次控制两个限位机构、上限位伸缩杆和下限位伸缩杆工作,使得两个限位机构分别与光伏板的上下边框配合连接;
14、控制所述刹车机构处于刹车状态,然后控制第一伸缩控制件收回,以使所述吸盘组与光伏板脱离;
15、控制清扫电机带动毛刷辊转动,并通过控制驱动机构、上限位伸缩杆和下限位伸缩杆来驱动主体框架上下移动,以对光伏板的一列区域进行清扫;
16、清扫完一列区域后,控制所述刹车机构处于非刹车状态,然后通过控制驱动机构来驱动主体框架横向移动设定距离,再控制所述刹车机构处于刹车状态,然后依次控制清扫电机、驱动机构、上限位伸缩杆和下限位伸缩杆再次工作,以对光伏板的另一列区域进行清扫,如此循环,直至将光伏板清扫完毕或电量降低至设定阈值;
17、在智能光伏清扫机器人将光伏板清扫完毕或电量降低至设定阈值时,发送指令至调度无人机,所述调度无人机接收到指令后,将智能光伏清扫机器人调度至下个光伏板工作或进行回收充电。
18、有益效果:本发明的智能光伏清扫机器人的结构布置和设计合理,结构较为简单,重量轻,拆卸可维护性高;智能光伏清扫机器人的驱动机构选用了全向福来轮,可以使得机器人在光伏板上上下左右自由活动,便于对光伏板全面清洁;本发明的智能光伏清扫机器人可适用于各类光伏板组,只需要更换不同行程的四根对称的电动伸缩杆即可,兼容性强;具备无人化管理,全程工作以及充电等均可通过无人机调度即可,另外无人机也可设定特定的巡检任务;上下限位轮组可将机器人稳定限定在光伏板上,使得该机器人也可以适应各地形场景环境,增加了环境适应性。
技术特征:
1.一种智能光伏清扫机器人,其特征在于,包括主体框架,所述主体框架的上侧固定连接有若干上限位伸缩杆和下限位伸缩杆,所述上限位伸缩杆和下限位伸缩杆的活动端部分别与一限位机构固定连接,两个限位机构分别用以与光伏板上下边框配合限位,所述限位机构上设有刹车机构,所述主体框架上设有驱动机构和清扫机构,所述驱动机构用以控制主体框架在光伏板上移动,所述清扫机构用以对光伏板的上表面进行清扫,所述主体框架的下侧通过第一伸缩控制件连接有吸盘组。
2.根据权利要求1所述的一种智能光伏清扫机器人,其特征在于,所述上限位伸缩杆和下限位伸缩杆分别为两个,两个上限位伸缩杆和下限位伸缩杆分别呈间隔设置。
3.根据权利要求2所述的一种智能光伏清扫机器人,其特征在于,所述限位机构包括固定在上限位伸缩杆和下限位伸缩杆的活动端部的连接架,所述连接架与轮架的一端可转动连接,所述轮架的另一端与安装在连接架上的翻转电机连接,所述轮架上设有限位轮组。
4.根据权利要求3所述的一种智能光伏清扫机器人,其特征在于,每一限位机构上设有两组限位轮组,每组限位轮组为3个限位轮,3个限位轮呈u型状设置。
5.根据权利要求1所述的一种智能光伏清扫机器人,其特征在于,所述驱动机构包括若干安装在主体框架上的驱动电机、驱动轮和从动轮,所述驱动轮设置主体框架任意相邻的两侧,所述从动轮设置在其余两侧,同侧的从动轮为两个以上,同侧的驱动轮为两个,所述驱动电机为两个,两个驱动电机分别设置在同侧的两个驱动轮之间,且其转轴与两个驱动轮分别传动连接。
6.根据权利要求1所述的一种智能光伏清扫机器人,其特征在于,所述清扫机构包括安装在主体框架上的清扫电机和毛刷辊,所述毛刷辊为两个,两个毛刷辊分别设置在主体框架的上下两侧,所述清扫电机设置在两个毛刷辊之间。
7.根据权利要求3所述的一种智能光伏清扫机器人,其特征在于,所述刹车机构包括倾斜固定在连接架上的第二伸缩控制件,所述第二伸缩控制件的下端铰接有垫块,两个垫块分别设置在光伏板上下边框的上侧。
8.根据权利要求1所述的一种智能光伏清扫机器人,其特征在于,所述主体框架的两侧分别设有边缘检测传感器。
9.一种智能光伏清扫系统,其特征在于,包括调度无人机和权利要求1-8任一所述的智能光伏清扫机器人,所述调度无人机的下侧中部设有机器人对接机构,所述智能光伏清扫机器人的上侧中部设有与机器人对接机构配合的无人机对接机构。
10.一种如权利要求9所述的智能光伏清扫系统的工作方法,其特征在于,包括:
技术总结
本发明公开了一种智能光伏清扫机器人、系统及其工作方法。该机器人包括主体框架,所述主体框架的上侧固定连接有若干上限位伸缩杆和下限位伸缩杆,所述上限位伸缩杆和下限位伸缩杆的活动端部分别与一限位机构固定连接,两个限位机构分别用以与光伏板上下边框配合限位,所述限位机构上设有刹车机构,所述主体框架上设有驱动机构和清扫机构,所述驱动机构用以控制主体框架在光伏板上移动,所述清扫机构用以对光伏板的上表面进行清扫,所述主体框架的下侧通过第一伸缩控制件连接有吸盘组。本发明的智能光伏清扫机器人结构布置和设计合理,结构较为简单,重量轻,拆卸可维护性高;可以适应各地形场景环境,增加了环境适应性。
技术研发人员:孙溢凡,王聪,张俊男
受保护的技术使用者:南京未来脑科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!