电机速度控制方法、装置、介质及设备与流程
本发明涉及电机控制方法,尤其涉及一种电机速度控制方法、装置、介质及设备。
背景技术:
1、在国家节能减排发展推动下,电驱动的新能源车辆得到高速发展。当中无刷直流电机广泛用于汽车中的电动助力转向系统、牵引驱动系统中。传统的无刷直流电机利用位置传感器(如霍尔传感器)或与轴连接的传感器(如旋转变压器和编码器)来完成相位确定,从而实现转子相位切换和速度预测、控制等。然而,大量传感器的使用增加了电机的成本和安装难度,并且对电磁干扰的敏感性可能会恶化电机中的信号测量,如旋转变压器失效时,容易导致电机超速不受控。
技术实现思路
1、鉴于以上技术问题,本发明提供了一种电机速度控制方法、装置、介质及设备,以解决现有技术对电机速度控制依赖大量传感器的缺点。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
3、根据本发明的一方面,提出了一种电机速度控制方法,所述方法包括:
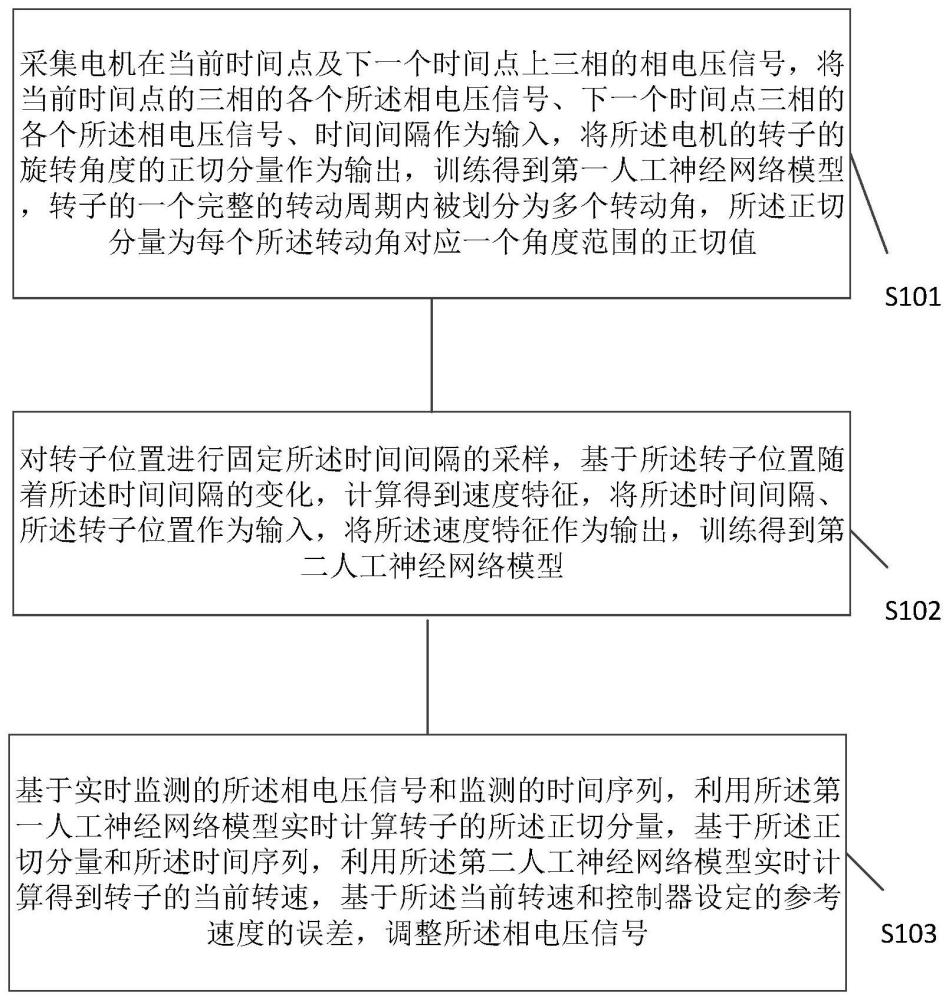
4、采集电机在当前时间点及下一个时间点上三相的相电压信号,将当前时间点的三相的各个所述相电压信号、下一个时间点三相的各个所述相电压信号、时间间隔作为输入,将所述电机的转子的旋转角度的正切分量作为输出,训练得到第一人工神经网络模型,转子的一个完整的转动周期内被划分为多个转动角,所述正切分量为每个所述转动角对应一个角度范围的正切值;
5、对转子位置进行固定所述时间间隔的采样,基于所述转子位置随着所述时间间隔的变化,计算得到速度特征,将所述时间间隔、所述转子位置作为输入,将所述速度特征作为输出,训练得到第二人工神经网络模型;
6、基于实时监测的所述相电压信号和监测的时间序列,利用所述第一人工神经网络模型实时计算转子的所述正切分量,基于所述正切分量和所述时间序列,利用所述第二人工神经网络模型实时计算得到转子的当前转速,基于所述当前转速和控制器设定的参考速度的误差,调整所述相电压信号。
7、进一步的,所述电机为无刷直流电机。
8、进一步的,所述电机的三相的所述相电压信号采集于三相逆变器,所述相电压信号在采集时,经过差分放大器进行共模噪声抑制,以及经过lc滤波和rc滤波进行信号过滤。
9、进一步的,所述第一人工神经网络模型包括输入层、输出层、隐藏层,所述输入层具有7个输入节点,所述输出层具有1个输出节点,所述隐藏层利用relu函数作为激活函数,并使用softmax函数处理所述输出层的结果,将输出数据转换为概率分布,表示每个所述正切分量的预测概率,将概率最高的所述正切分量作为输出。
10、进一步的,所述第二人工神经网络模型在训练时,使用反向传播算法进行训练,通过最小化交叉熵损失函数来优化网络权重和偏置。
11、进一步的,在计算所述速度特征时,包括:
12、基于编码器,获取连续两个所述时间间隔的所述转子位置,计算两个所述转子位置的位置差异;
13、将所述位置差异除以所述时间间隔,得到所述速度特征。
14、进一步的,所述第一人工神经网络模型和所述第二人工神经网络模型为ann模型。
15、根据本公开的第二方面,提供一种电机速度控制装置,包括:
16、位置预测模块,用于采集电机在当前时间点及下一个时间点上三相的相电压信号,将当前时间点的三相的各个所述相电压信号、下一个时间点三相的各个所述相电压信号、时间间隔作为输入,将所述电机的转子的旋转角度的正切分量作为输出,训练得到第一人工神经网络模型,转子的一个完整的转动周期内被划分为多个转动角,所述正切分量为每个所述转动角对应一个角度范围的正切值;
17、速度预测模块,用于对转子位置进行固定所述时间间隔的采样,基于所述转子位置随着所述时间间隔的变化,计算得到速度特征,将所述时间间隔、所述转子位置作为输入,将所述速度特征作为输出,训练得到第二人工神经网络模型;
18、速度控制模块,用于基于实时监测的所述相电压信号和监测的时间序列,利用所述第一人工神经网络模型实时计算转子的所述正切分量,基于所述正切分量和所述时间序列,利用所述第二人工神经网络模型实时计算得到转子的当前转速,基于所述当前转速和控制器设定的参考速度的误差,调整所述相电压信号。
19、根据本公开的第三方面,提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现如上述的电机速度控制方法。
20、根据本公开的第四方面,提供一种电机速度控制设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行上述的电机速度控制方法。
21、本公开的技术方案具有以下有益效果:
22、基于对三相的相电压进行实时采集,可以快速、准确地预测到电机转子转速,当中无需依赖各种复杂的传感器,大大提高了电机控制的安全性;基于对正切分量的设定,可以提高转子位置判断的精确性,并减少由计算产生的误差。
技术特征:
1.一种电机速度控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的电机速度控制方法,其特征在于,所述电机为无刷直流电机。
3.根据权利要求1所述的电机速度控制方法,其特征在于,所述电机的三相的所述相电压信号采集于三相逆变器,所述相电压信号在采集时,经过差分放大器进行共模噪声抑制,以及经过lc滤波和rc滤波进行信号过滤。
4.根据权利要求1所述的电机速度控制方法,其特征在于,所述第一人工神经网络模型包括输入层、输出层、隐藏层,所述输入层具有7个输入节点,所述输出层具有1个输出节点,所述隐藏层利用relu函数作为激活函数,并使用softmax函数处理所述输出层的结果,将输出数据转换为概率分布,表示每个所述正切分量的预测概率,将概率最高的所述正切分量作为输出。
5.根据权利要求1所述的电机速度控制方法,其特征在于,所述第二人工神经网络模型在训练时,使用反向传播算法进行训练,通过最小化交叉熵损失函数来优化网络权重和偏置。
6.根据权利要求1所述的电机速度控制方法,其特征在于,在计算所述速度特征时,包括:
7.根据权利要求1所述的电机速度控制方法,其特征在于,所述第一人工神经网络模型和所述第二人工神经网络模型为ann模型。
8.一种电机速度控制装置,其特征在于,包括:
9.一种电机速度控制设备,其特征在于,所述设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1-7中任一项所述的电机速度控制方法。
技术总结
本发明涉及车辆电机控制方法领域,具体涉及一种电机速度控制方法、装置、介质及设备,方法包括:采集电机在当前时间点及下一个时间点上三相的相电压信号,将当前时间点的三相的各个相电压信号、下一个时间点三相的各个相电压信号、时间间隔作为输入,将电机的转子的旋转角度的正切分量作为输出,训练得到第一人工神经网络模型;对转子位置进行固定时间间隔的采样,基于转子位置随着时间间隔的变化,计算得到速度特征,将时间间隔、转子位置作为输入,将速度特征作为输出,训练得到第二人工神经网络模型;基于当前转速和控制器设定的参考速度的误差,调整相电压信号。通过本发明,解决现有技术对电机速度控制依赖大量传感器的缺点。
技术研发人员:陈跃东,宋爽,李筑龙,梁松波,陈桂港,金杰
受保护的技术使用者:深圳熙斯特新能源技术有限公司
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!