基于磁链延时补偿的永磁同步电机低载波比电流控制方法
本发明属于永磁同步电机领域,涉及一种基于磁链延时补偿的永磁同步电机低载波比电流控制方法。
背景技术:
1、随着各领域对于永磁同步电机驱动系统大功率化、高速化需求的增加,为保持系统运行下的高效率,电驱系统往往工作在载波比(功率开关器件开关频率与电机运行基波频率的比值)低至10以下来减小变频器损耗,低载波比运行是大功率容量或高转速电机驱动系统的典型工况。随着载波比的降低,数字控制系统的调制和控制延时较大,加剧了电机dq轴电流控制的耦合,使系统相位裕度下降,导致电流控制器性能降级甚至失稳,无法满足大功率和高速应用场景暂态过程短、动态响应快的要求。
2、目前,针对低载波比下基波电流控制系统模型主要围绕系统延时补偿、连续模型离散化误差和考虑转子运动效应等方面展开。有学者针对数字控制系统引入1ts的控制延迟,假设电角速度不变来直接增加该段时间内相位增加量进行补偿,但实际延时时间难以直接获得,补偿的相角缺乏时效性和准确性,容易导致系统失控。还有学者进一步考虑反馈通路中的采样延迟,指出反馈通道中的采样延迟同样会引入耦合误差和时延误差,耦合效应随转速升高而加剧。然而,实际载波比低于10时,即使针对控制延迟和采样延迟等都进行补偿,电流环仍会失稳,仍然缺乏对于考虑延迟后系统稳定性的分析。除此之外,还有研究针对系统电流环dq轴电流耦合,推导了同步旋转坐标系下的复矢量模型,按照零极点对消原则解决了定子电流转矩分量和磁链分量的耦合问题,但受限于系统响应带宽,动态性能较差。由于数字控制器本身的离散特性,电流反馈回路中离散采样与实际电流存在误差,前一控制周期采样计算的dq轴电流与当前控制周期实际的dq轴电流值也存在偏差。在系统载波比减小时,连续域中设计的电流控制器离散化后误差过大,连续域内设计的控制器零点难以与离散电机模型的极点实现互消,且随载波比的降低二者之间的偏差更大。
3、基于以上背景,本发明针对双永磁电机系统的位置同步问题,提出一种永磁同步电驱系统低载波比电流控制方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于磁链延时补偿的永磁同步电机低载波比电流控制方法。
2、为达到上述目的,本发明提供如下技术方案:
3、基于磁链延时补偿的永磁同步电机低载波比电流控制方法,该方法包括以下步骤:
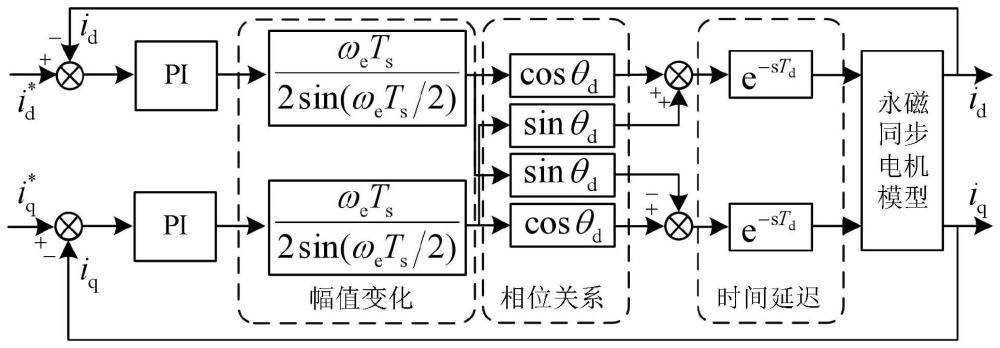
4、s1:分析逆变器理想输出电压矢量与考虑数字控制延迟后输出电压矢量的关系,控制延迟与输出作用延迟引起的电压输出的误差表现在幅值与相位两方面,幅值上变为理想输出电压幅值的1/[(2/ωets)·sin(ωets/2)]倍,相位上滞后于理想输出电压在1.5个控制周期内同步旋转坐标系旋转的角度;
5、s2:分析系统延迟存在时电流调节器控制下的驱动系统稳定性,建立以q轴电流环闭环控制下的开环go(s)和闭环传递函数gc(s),定义k=(2/ωets)·sin(ωets/2);
6、
7、
8、s3:基于系统稳定的充分必要条件,利用绘制闭环传递函数的伯德图验证分析,得到,随着电机转速的上升,需不断增大比例系数kp;
9、系统稳定的充分必要条件为:当系统闭环传递函数的特征根均位于s平面的左半平面或特征根的实部都不小于0,有出现k(rcos(θd)-ωelsin(θd))+kp<0时,系统不稳定;
10、s4:基于αβ静止坐标系下,进行磁链无差拍控制,避免由于低载波比工况下控制延迟带来的电压控制误差;
11、s5:根据当前周期内的dq轴电流、角速度ωe和转子位置角θe预测下一拍磁链和电流;利用dq轴电流给定估计当前周期的磁链大小,变换至静止坐标系下时,考虑无差拍控制中一拍预测误差和无差拍控制误差的两拍误差,在变换角度上加以补偿,得到磁链给定值;依据静止坐标系下的电机数学模型,直接得到svpwm所需的参考电压矢量。
12、本发明的有益效果在于:
13、(1)本发明推导得到了数字控制系统中基波电流控制模型中实际作用的平均电压矢量与理想给定电压矢量在幅值和相位上的关系,相位滞后加剧了dq轴电压间的耦合;分析受基频影响下系统稳定的条件,并指出基频变大时需保证相应增大比例系数kp才能保证系统稳定;根据采样定理和数字信号处理器的运算性能可知,控制系统电流环的响应带宽fbw往往满足fsw/10<fbw<fsw/5:,而受限于开关频率fsw过小,系统带宽无法过大;比例系数kp在控制系统中实现减小系统稳态误差并加快系统响应速度的作用,其范围取决于具体的控制系统和被控对象,比例系数kp过大会导致系统出现过大超调甚至振荡而不利于系统稳定性。
14、(2)本发明提出在αβ静止坐标系下考虑无差拍控制固有的两拍误差,预测下一拍定子磁链与定子电流,直接得到调制所需参考定子电压,消除了由于系统延迟和各坐标系之间坐标变换带来的电压跟随误差,实现了低载波比工况下的电机转速跟随给定稳定运行,dq轴电流无静差跟随给定。
15、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.基于磁链延时补偿的永磁同步电机低载波比电流控制方法,其特征在于:该方法包括以下步骤:
技术总结
本发明涉及一种基于磁链延时补偿的永磁同步电机低载波比电流控制方法,属于永磁同步电机领域。本发明推导得到了数字控制系统中基波电流控制模型中实际作用的平均电压矢量与理想给定电压矢量在幅值和相位上的关系,相位滞后加剧了dq轴电压间的耦合;分析受基频影响下系统稳定的条件,并指出基频变大时需保证相应增大比例系数k<subgt;p</subgt;才能保证系统稳定;而受限于开关频率系统带宽无法过大,比例系数k<subgt;p</subgt;过大也不利于系统稳定性。
技术研发人员:李文东,向学位,李辉,姚然,宋月恒
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!