逆变器控制方法、系统、控制器及存储介质与流程
本申请涉及电机控制,尤其涉及一种逆变器控制方法、系统、控制器及存储介质。
背景技术:
1、在电动汽车控制系统中,逆变器缺相故障会大幅降低电机的驱动性能。相关技术中,在逆变器的桥臂故障时,通常采用冗余拓扑,实现逆变器缺相运行。但是,冗余拓扑需要改动逆变电路和控制策略,增加了逆变器的硬件电路成本和控制成本。
技术实现思路
1、本申请的主要目的在于:提供一种逆变器控制方法、系统、控制器及存储介质,旨在解决现有逆变器通过冗余拓扑实现缺相运行,增加了逆变器的硬件电路成本和控制成本的技术问题。
2、为实现上述目的,本申请采用如下技术方案:
3、第一方面,本申请提供一种逆变器控制方法,方法包括:
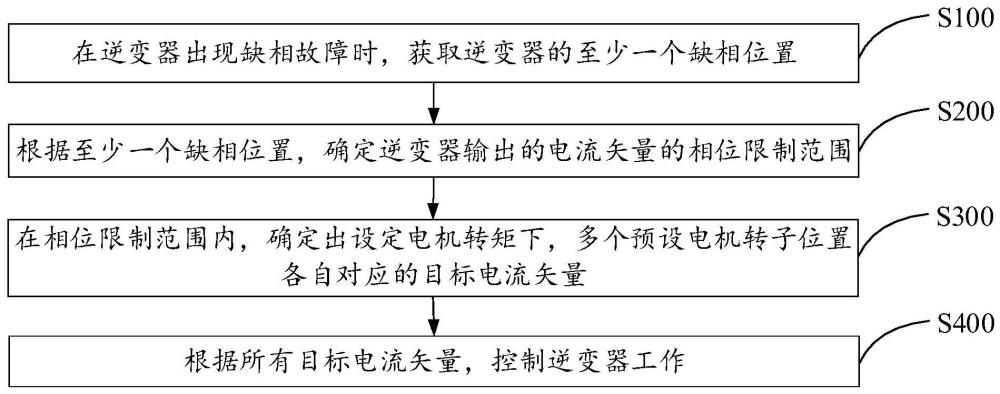
4、在逆变器出现缺相故障时,获取逆变器的至少一个缺相位置;
5、根据至少一个缺相位置,确定逆变器输出的电流矢量的相位限制范围;
6、在相位限制范围内,确定出设定电机转矩下,多个预设电机转子位置各自对应的目标电流矢量;
7、根据所有目标电流矢量,控制逆变器工作。
8、可选地,在相位限制范围内,确定出设定电机转矩下,多个预设电机转子位置各自对应的目标电流矢量的步骤,包括:
9、根据相位限制范围,确定多个预设电机转子位置各自对应的电流矢量集合;电流矢量集合包括设定电机转矩下预设电机转子位置对应的多个初始电流矢量;
10、针对各预设电机转子位置,从对应的电流矢量集合中,确定出目标电流矢量。
11、可选地,根据相位限制范围,确定多个预设电机转子位置各自对应的电流矢量集合的步骤,包括:
12、获取多个预设电机转子位置各自对应的电流矢量的第一恒转矩曲线;第一恒转矩曲线为在设定电机转矩下电流矢量的变化曲线,第一恒转矩曲线所在坐标系的纵轴为电流矢量的相位,第一恒转矩曲线所在坐标系的的横轴为电流矢量的幅值;
13、针对各预设电机转子位置,根据相位限制范围,从第一恒转矩曲线中确定出电流矢量集合。
14、可选地,获取多个预设电机转子位置各自对应的电流矢量的第一恒转矩曲线的步骤,包括:
15、获取各预设电机转子位置对应的dq坐标系下的第二恒转矩曲线;第二恒转矩曲线为在设定电机转矩下d轴电流和q轴电流的变化曲线,第二恒转矩曲线所在坐标系的横轴为d轴电流,第二恒转矩曲线所在坐标系的纵轴为q轴电流;
16、将第二恒转矩曲线映射到极坐标系下,得到第一恒转矩曲线。
17、可选地,针对各预设电机转子位置,从对应的电流矢量集合中,确定出目标电流矢量的步骤,包括:
18、针对各预设电机转子位置,从对应的电流矢量集合中,确定出电流矢量幅值最小的目标电流矢量。
19、可选地,根据至少一个缺相位置,确定电流矢量的相位限制范围的步骤,包括:
20、针对各缺相位置,根据对应的预设相位限制范围,确定出电流矢量的初始相位限制范围;
21、根据所有初始相位限制范围的交集,得到相位限制范围。
22、可选地,当缺相位置为第一相上桥臂时,预设相位限制范围为两相静止坐标系下90°~270°;
23、当缺相位置为第一相下桥臂时,预设相位限制范围为两相静止坐标系下270°~90°;
24、当缺相位置为第二相上桥臂时,预设相位限制范围为两相静止坐标系下210°~30°;
25、当缺相位置为第二相下桥臂时,预设相位限制范围为两相静止坐标系下30°~210°;
26、当缺相位置为第三相上桥臂时,预设相位限制范围为两相静止坐标系下330°~150°;
27、当缺相位置为第三相下桥臂时,预设相位限制范围为两相静止坐标系下150°~330°。
28、第二方面,本申请还提供一种控制器,设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的逆变器控制程序,通过逆变器控制程序配置为实现如上述任一项逆变器控制方法的步骤。
29、第三方面,本申请还提供一种逆变器控制系统,系统包括:
30、逆变器;
31、如上述的控制器。
32、第四方面,本申请还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述任一项的逆变器控制方法的步骤。
33、本申请提供的上述一个或多个技术方案,可以具有如下优点或至少实现了如下技术效果:
34、本申请提供一种逆变器控制方法、系统、控制器及存储介质,在逆变器出现缺相故障时,根据逆变器的缺相位置,确定逆变器输出的电流矢量的相位限制范围,在该相位限制范围内确定出设定电机转矩下,多个预设电机转子位置对应的目标电流矢量,控制逆变器工作,以驱动电机在不同预设电机转子位置,都能输出设定电机转矩。从而通过在不同预设电机转子位置,控制逆变器输出相位限制范围内的不同的电流矢量,从软件上实现了逆变器缺相运行,无需在逆变器中增加冗余拓扑,也无需改动逆变器的控制策略,节约了逆变器的硬件电路成本和控制成本。
技术特征:
1.一种逆变器控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述在所述相位限制范围内,确定出设定电机转矩下,多个预设电机转子位置各自对应的目标电流矢量的步骤,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述相位限制范围,确定多个预设电机转子位置各自对应的电流矢量集合的步骤,包括:
4.如权利要求3所述的方法,其特征在于,所述获取多个所述预设电机转子位置各自对应的所述电流矢量的第一恒转矩曲线的步骤,包括:
5.如权利要求2所述的方法,其特征在于,所述针对各所述预设电机转子位置,从对应的所述电流矢量集合中,确定出目标电流矢量的步骤,包括:
6.如权利要求1所述的方法,其特征在于,所述根据至少一个所述缺相位置,确定电流矢量的相位限制范围的步骤,包括:
7.如权利要求6所述的方法,其特征在于,当所述缺相位置为第一相上桥臂时,所述预设相位限制范围为两相静止坐标系下90°~270°;
8.一种控制器,其特征在于,所述设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的逆变器控制程序,通过逆变器控制程序配置为实现如权利要求1至7中任一项所述的逆变器控制方法的步骤。
9.一种逆变器控制系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,计算机程序被处理器执行时实现如权利要求1至7中任一项所述的逆变器控制方法的步骤。
技术总结
本申请公开一种逆变器控制方法、系统、控制器及存储介质,涉及电机控制技术领域,方法包括:在逆变器出现缺相故障时,获取逆变器的至少一个缺相位置;根据至少一个缺相位置,确定逆变器输出的电流矢量的相位限制范围;在相位限制范围内,确定出设定电机转矩下,多个预设电机转子位置各自对应的目标电流矢量;根据所有目标电流矢量,控制逆变器工作。本申请在软件上通过在不同预设电机转子位置,控制逆变器输出相位限制范围内的不同的电流矢量,实现逆变器缺相运行,无需在逆变器中增加冗余拓扑,也无需改动逆变器的控制策略,节约了逆变器的硬件电路成本和控制成本。
技术研发人员:严乐阳,牛长佳,晋孝龙
受保护的技术使用者:苏州汇川联合动力系统股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!