一种基于虚拟同步机的构网型换流器附加阻尼支路方法
本发明涉及电力电子设备小信号稳定性提升及振荡抑制技术研究,尤其涉及一种虚拟同步机附加阻尼支路的方法。
背景技术:
1、为了应对跟网型控制的电压源型变流器(voltage source converter,vsc)连接弱网时的稳定性问题和功率传输极限问题,基于功率定向的构网型vsc成为发展趋势,其中虚拟同步发电机(virtual synchronous generator,vsg)控制是研究中最为常见的构网型vsc控制策略,该策略模拟了传统电网有功-频率、无功-电压的下垂特性。除此之外,vsg控制为了缓解大规模新能源并网带来的电网惯性减少问题,配合额外的储能或者加大电容等,模拟了传统同步电机的摇摆方程和惯性响应,使vsc具备对系统频率和惯性支撑。
2、然而,vsg由于模拟了传统同步发电机的特性,因此不可避免地继承了一些传统同步发电机存在的问题。例如低频振荡问题,通常采用一个在摇摆方程中的阻尼项为虚拟同步机提供机电阻尼。但该阻尼系数的增大会受到预期的下垂特性的约束,因此,在系统等效阻尼不足时,vsg仍存在低频振荡风险,威胁着电力系统的安全稳定运行。
技术实现思路
1、有鉴于此,本发明提供了一种虚拟同步机附加阻尼支路的方法,以解决现有技术中降低vsg系统低频振荡风险并优化了系统阻尼设计的技术问题。
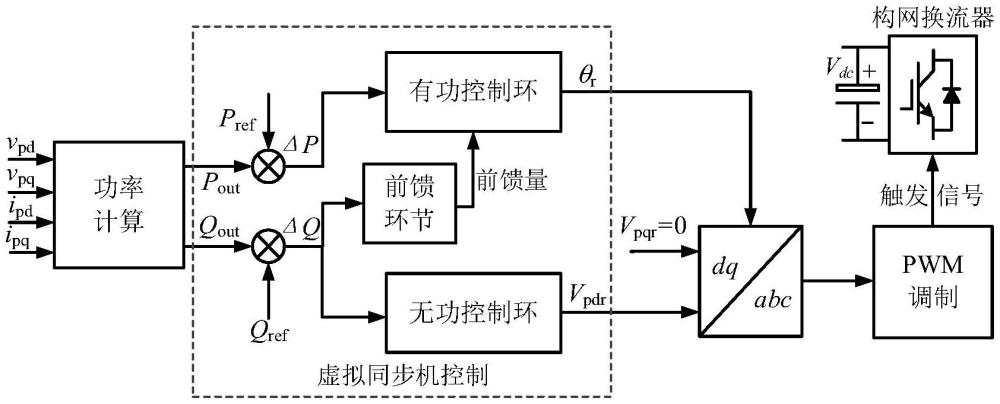
2、本发明提供了一种虚拟同步机附加阻尼支路的方法,包括:
3、s1.获取所述构网型换流器系统pcc点电压电流的测量值,以及虚拟同步机功率控制的有功功率参考值pref、有功功率测量值pout,无功功率参考值qref、无功功率测量值qout;
4、s2.获取虚拟同步机功率控制的有功控制环输入差值、无功控制环输入差值;
5、s3.获取所述构网型换流器系统pcc点电压q轴分量参考值,获取所述虚拟同步机经无功控制环前馈至有功控制环,得到pcc点电压相位参考值和d轴分量幅值参考值;
6、s4.将所述pcc点电压d轴分量参考值、q轴分量参考值以及pcc点电压相位参考值,通过反派克变换,得到控制构网换流器的调制信号,再通过调制算法,得到控制换流器的pwm信号。
7、进一步地,所述步骤s1中,pcc点电压电流的测量值是通过对其三相电压向量和三相电流向量得到,所述park变换所采用的角度为θpcc,θpcc为pcc点电压相角。
8、进一步地,所述步骤s1中,所述功率控制环的有功功率测量值pout、无功功率测量值qout,是根据pcc点电压电流经功率计算得到的,具体计算方法如下:
9、pout=1.5(vpdipd+vpqipq)
10、qout=1.5(vpqipd-vpdipq)
11、其中,vpd表示pcc点电压d轴分量,vpq表示pcc点电压q轴分量,ipd表示pcc点电流d轴分量,ipq表示pcc点电流q轴分量。
12、进一步地,所述步骤s2中,所述有功控制环输入差值、所述无功控制环输入差值的获得包括如下表达式:
13、δp=pref-pout
14、δq=qref-qout
15、进一步地,所述步骤s3中,所述的pcc点电压相位参考值,是通过有功功率控制环得到的;所述的pcc点电压d轴分量幅值参考值,是通过无功控制环得到的,其控制方程为:
16、
17、vpdr=v0+dqδq
18、其中,f(s)表示所述前馈环节的传递函数,j为虚拟惯量,dp为阻尼系数,dq为无功-电压下垂系数,ωn为系统额定频率,v0为系统额定电压
19、进一步地,其特征在于,所述功率控制环中前馈环节采用传递函数:
20、
21、其中,a为与系统参数相关的常量,kd定义为附加阻尼系数,其值的大小反映了所述附加阻尼支路能为系统提供的额外阻尼的裕量。
22、进一步地,所述步骤s3具体包括如下步骤:
23、s31.获取虚拟同步机无功控制环中无功功率参考值和无功功率测量值的差值,将其输入到功率前馈环节,得到无功功率前馈量;
24、s32.将所述无功功率前馈量结合有功环生成的频率参考值以及额定频率,计算出所述总频率参考值;
25、s33.将所述的总频率参考值通过有功控制环的积分器,得到所述pcc点电压的相位参考值;
26、s34.将所述的无功控制环中无功功率参考值和无功功率测量值的差值输入到无功控制环,得到所述pcc点电压的d轴分量幅值参考值。
27、进一步地,所述步骤s4具体包括如下步骤:
28、s41.根据所述pcc点电压d轴分量参考值和所述pcc点电压q轴分量参考值,生成控制构网换流器的调制信号;
29、s42.将所述构网换流器的调制信号传送至pwm生成器,生成控制构网换流器的pwm信号。
30、本发明与现有技术相比存在的有益效果是:
31、1、本发明采用基于虚拟同步机的附加阻尼支路方法,通过在有功功率控制环中引入无功前馈,减小虚拟同步机在等效阻尼不足时发生低频振荡的风险。
32、2、本发明在有功功率控制环中引入无功前馈环节后,系统阻尼水平得到了有效提高,阻尼设计也得到了优化。
33、3、本发明在有功功率控制环中引入辅助支路,避免了该前馈环节对虚拟同步机稳态运行点造成影响。
34、4、本发明可根据系统预期阻尼比来设计辅助支路以及前馈环节的传递函数,避免了对系统原有的下垂特性和惯性响应造成影响。
35、5、本发明的方法结构简单,便于工程实际应用,且在系统等效阻尼变化的情况下均有良好的效果。
技术特征:
1.一种基于虚拟同步机的构网型换流器附加阻尼支路方法,该方法包括以下步骤:
2.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s1中,pcc点电压电流的测量值是通过对其三相电压向量和三相电流向量得到,所述park变换所采用的角度为θpcc,θpcc为pcc点电压相角。
3.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s1中,所述功率控制环的有功功率测量值pout、无功功率测量值qout,是根据pcc点电压电流经功率计算得到的,具体计算方法如下:
4.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s2中,所述有功控制环输入差值、所述无功控制环输入差值的获得包括如下表达式:
5.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s3中,所述的pcc点电压相位参考值,是通过有功功率控制环得到的;所述的pcc点电压d轴分量幅值参考值,是通过无功控制环得到的,其控制方程为:
6.根据权利要求3所述的方法,其特征在于,所述功率控制环中前馈环节采用传递函数:
7.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s3具体包括如下步骤:
8.根据权利要求1所述的基于虚拟同步机的构网型换流器附加阻尼支路方法,其特征在于,所述步骤s4具体包括如下步骤:
技术总结
本发明涉及电力电子设备小信号稳定性提升领域,基于虚拟同步机控制,提供了一种附加阻尼支路的方法,可为系统提供额外的阻尼。根据构网型换流器的工作原理以及虚拟同步机的控制结构,其阻尼水平会收到系统预期下垂特性的约束,因此等效阻尼不足是引发系统低频振荡的根本原因。考虑到有功控制环和无功控制环之间的耦合作用,通过在功率控制环中增加一条附加支路,使其能为系统提供较为充足的等效正阻尼效应。据此,设计了一种构网型换流器附加阻尼支路方法,该方法依据在有功控制环中引入的一条无功前馈支路,实现了在保持系统原有下垂特性和惯性响应的同时,能为系统提供额外的阻尼。本发明降低了构网型换流器低频振荡风险,优化了阻尼设计。
技术研发人员:熊小玲,李昕悦,罗博晨,赵成勇
受保护的技术使用者:华北电力大学
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!