一种优化清洁效果的倾斜光伏清洁机器人装置及其运行系统的制作方法
本发明涉及光伏清洁装置,尤其涉及光伏清洁机器人的倾斜结构及倾斜机构的转体光伏清洁机器人。
背景技术:
1、光伏发电装置是一种利用半导体界面的光生伏特效应而将光能转变为电能的一种技术。 主要由太阳能发电板(组件,含支架)、 控制器和逆变器三大部分组成, 主要部件由半导体电子元器件构成。 太阳能发电经过串联后进行封装保护可形成大面积的太阳能发电组件, 再配合上控制器和逆变器等部件就形成了光伏发电装置。由于太阳发电板需要露天作业, 长时间暴漏于生态环境中,每时每刻会积累冰雪、泥沙、污垢等, 如果不能及时的对太阳能发电板表面进行清洁,会影响太阳能发电板的正常发电, 甚至会导致太阳能发电板损坏, 因此, 需要在太阳能发电板的表面加装光伏清洁机器人, 从而可以保证光伏发电装置的正常运行,并延长光伏发电板的寿命。现有挂机式清洁机都以贴附且平行于太阳能发电板表面上,通过两端限位轮固定清洁机主体垂直于太阳能发电板上下边框做左右往复清洁工作。
2、专利申请号为cn202022692474.0, 公开了一种光伏清洁机器人, 包括主体、 主体两端的上下行走装置、 辊刷、 传动轴和电控箱; 上行走装置包括上外壳、 辊刷电机、上传动组件、 上行走轮和悬挂轮; 辊刷电机和上传动组件设在上外壳内; 上行走轮和悬挂轮由上传动组件驱动, 枢接在上外壳外且相垂直; 下行走装置包括下外壳、 驱动电机、下传动组件和下行走轮; 驱动电机设在下外壳外并位于主体下方; 下传动组件设在下外壳内; 下行走轮由下传动组件驱动, 枢接在下外壳外且与上行走轮平行; 辊刷和传动轴均枢接在上下外壳间, 辊刷与辊刷电机传动连接, 传动轴两端分别与上传动组件、 下传动组件传动连接; 主体、 上下外壳均是压铸成型。 上述专利中的清洁机器人由于装配过程中配件间缝隙很小能够很好的适用于风沙较大的环境, 具有极高的传动效率和优异的防沙防水性能。
3、但上述光伏清洁机器人使用中仍存在以下问题:光伏清洁机器人在清洁工作时,被清扫出来的灰尘从光伏清洁机器人上侧飞溅出来并再次污染光伏板组件表面,降低了清洁效果。
技术实现思路
1、为了解决上述至少一个技术问题, 本发明提出一种优化清洁效果的倾斜光伏清洁机器人装置及其运行系统,通过清洁机器人本体和光伏板组件相对光伏板表面,以第一转动角度旋转清洁机器人工作姿态,使清洁机器人在工作时能够将光伏板上污垢向光伏板斜下方进行清洁,提升光伏清洁机器人的清洁效果和清洁效率,解决了常规清洁过程中清洁效果不佳的问题。
2、为实现上述目的, 本发明采用如下技术方案。
3、本申请提供一种优化清洁效果的倾斜光伏清洁机器人装置及其运行系统,包括转动机构、限制机构和驱动启动系统。所述光伏清洁机器人两端驱动机与光伏清洁机器人之间设置的偏心轴及电动转向机构,所述光伏清洁机器人上侧驱动机及上侧驱动机到达设置限位机构后依次启动,所述驱动机与光伏清洁机器人转动限制机构由第一转动角度。
4、优选地, 所述转动机构包括上下驱动机平行且固定在所述清洁机器人本体两侧的偏心轴,所述上下驱动机有与所述限位机构相对应的所述清洁机器人本体的限位器。
5、优选地,所述偏心轴的偏心轴固定于所述驱动机上,所述旋转轴固定于所述清洁机器人本体容置腔内。
6、优选地, 所述第一转动角度为5-15° 。
7、优选地,所述驱动机偏心轴上下各1个,所述光伏机器人本体限位器各1个。
8、优选地, 所述壳体上部设有用于提供电能的光伏板, 所述驱动机和光伏板均与设置在所述壳体一端的清洁机器人控制箱电连接。
9、与现有技术相比, 本发明具有如下有益效果。
10、本发明通过在清洁机器人本体和光伏组件间设置可相对于清洁机本体以第一转动角度转动的倾斜结构, 使得清洁机器人本体在工作时平行于光伏板表面向前进方向倾斜,提高清洁效率和效果。
技术特征:
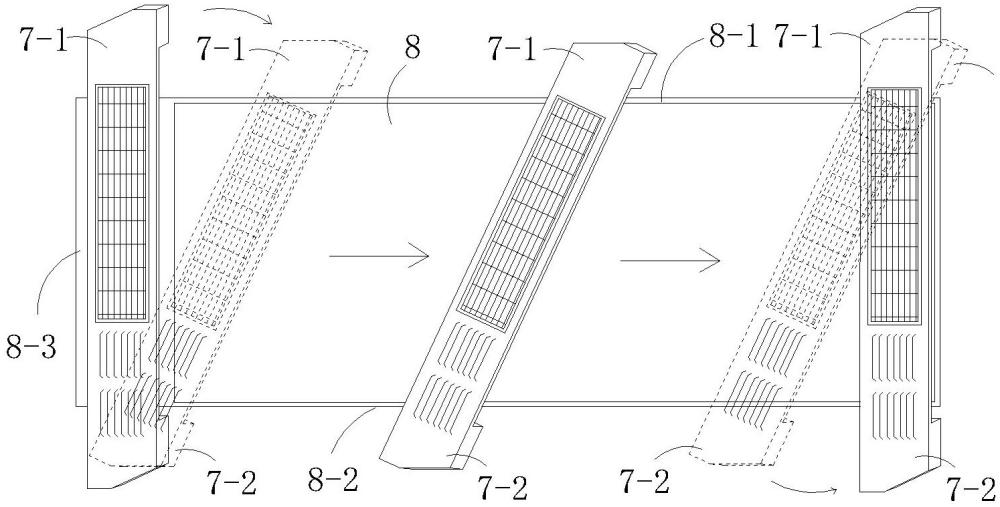
1.一种优化清洁效果的倾斜光伏清洁机器人装置及其运行系统,包括光伏组件(8)和清洁机本体(7),其特征在于所述清洁机本体(7)和所述光伏组件(8)间设有所述清洁机本体(7)待机时驻停在所述光伏组件待机区(8-3),并与所述光伏组件(8)保持相对的垂直关系,所述清洁机本体(7)开始清洁所述光伏组件(8)时,由所述清洁机本体上侧(7-1)位置的所述清洁机本体(7)的所述上侧驱动机(5)前进,所述清洁机本体(7)两侧的所述转动轴(1)和所述转动轴(2)同步转动,使所述清洁机本体(7)沿所述清洁机本体(7)的所述下侧驱动机(6)为圆心顺时针转动5~15度,并保持所述清洁机本体(7)两侧的所述驱动机(5)上的所述驱动机限位轮(5-1)和所述驱动机(6)上的所述驱动机限位轮(6-1)将所述清洁机本体(7)限制在所述光伏组件(8)上。当所述清洁机本体(7)转体到位,所述下侧驱动机(6)启动,与所述上侧驱动机(5)共同驱动所述清洁机本体(7)对所述光伏组件(8)表面进行清洁作业。当所述清洁机本体(7)清洁至所述光伏组件(8)另一侧,所述清洁机本体(7)的所述上侧驱动机(5)停止工作,所述下侧驱动机(6)继续前进,所述清洁机本体(7)两侧的所述转动轴(1)和所述转动轴(2)同步反向转动,使所述清洁机本体(7)沿所述驱动机(5)为圆心逆时针转动5~15度,并保持所述清洁机本体(7)两侧的所述驱动机(5)上的所述驱动机限位轮(5-1)和所述驱动机(6)上的所述驱动机限位轮(6-1)将所述清洁机本体(7)限制在所述光伏组件(8)上。完成对所述光伏组件(8)全面清洁后,所述清洁机本体(7)恢复与所述光伏组件(8)的相对垂直位置,所述清洁机本体(7)复位至所述光伏组件待机区(8-3)。
2.根据权利要求1所述用于光伏清洁机器人的倾斜机构,其特征在于,倾斜机构中所述上侧驱动机偏心轴(1)和所述下侧驱动机偏心轴(2)连接固定使所述上侧驱动机(5)与所述下侧驱动机(6)始终平行且保持相对距离,同时连接旋转所述清洁机本体(7)使其在5~15度范围内以所述下侧驱动机(6)为圆心转动。
3.根据权利要求2所述用于光伏清洁机器人的倾斜机构,其特征在于,所述上侧驱动机偏心轴(1)和下侧驱动机偏心轴(2)为偏心轴结构。
4.根据权利要求1所述用于光伏清洁机器人的倾斜机构,其特征在于,所述上侧限位器(3)和所述下侧限位器(4)为所述清洁机本体(7)转体工作后平行于所述光伏组件(8)上下边框,所述上侧限位器(3)和所述下侧限位器(4)垂直距离与所述上侧驱动机(5)外沿和所述下侧驱动机(6)下沿垂直距离相等。
5.根据权利要求1所述用于光伏清洁机器人的倾斜机构,其特征在于,第一转动角度为5-15°。
6.根据权利要求1所述用于光伏清洁机器人的倾斜机构,其特征在于,所述清洁机本体(7)与所述上侧驱动机(5)通过所述上侧驱动机偏心轴(1)连接,所述清洁机本体(7)与所述下侧驱动机(6)通过所述下侧驱动机偏心轴(2)连接。
7.根据权利要求2所述用于光伏清洁机器人(7)的倾斜机构,其特征在于,所述上侧偏心盘(1-1)固定于所述上侧驱动机(5),所述下侧偏心盘(2-1)固定于所述下侧驱动机(6)。
8.根据权利要求2所述用于光伏清洁机器人的倾斜机构,其特征在于,所述用于光伏清洁机器人(7)间上下形成有用于容纳所述上侧旋转轴(1-2)和所述下侧旋转轴(2-2)的容置腔。
9.根据权利要求2所述用于光伏清洁机器人的限制机构,其特征在于,所述上侧限位器(3)辅助所述上侧驱动机(5)工作姿态正确,所述下侧限位器(4)辅助所述下侧驱动机(6)工作姿态正确。
10.根据权利要求1-9任一所述用于光伏清洁机器人的限制机构,其特征在于,所述距离由相对所述光伏组件(8)宽度确定,所述用于光伏清洁机器人(7)间上下形成有用于容纳所述上侧旋转轴(1-2)和所述下侧旋转轴(2-2)的容置腔各一个,容置腔口小腔大,用于固定旋转轴。
11.根据权利要求1所述用于光伏清洁机器人的启动系统,其特征在于,所述下侧驱动机(6)在所述上侧驱动机偏心轴(1)和下侧驱动机偏心轴(2)将所述所述清洁机本体(7)完全转体至标准工作姿态后,与所述上侧驱动机(5)共同驱动所述清洁机本体(7)进行工作。
12.根据权利要求1所述用于光伏清洁机器人的启动系统,其特征在于,所述清洁机本体(7)的清洁工作结束时,所述上侧驱动机(5)首先停止工作,所述下驱动机(6)继续工作,同时所述上侧驱动机偏心轴(1)和下侧驱动机偏心轴(2)将所述清洁机本体(7)以所述上侧驱动机偏心轴(1)为轴心转体至标准待机姿态,同时对所述光伏组件(8)未清洁区域进行清洁。
13.一种优化清洁效果的倾斜光伏清洁机器人,其特征在于,所述上侧驱动机(5)、所述下驱动机(6)、所述上侧驱动机偏心轴(1)和下侧驱动机偏心轴(2)都由所述清洁机本体(7)供电。
技术总结
本发明提供一种优化清洁效果的倾斜光伏清洁机器人装置及其运行系统,包括当机器人工作时,使本体和光伏板之间限定转动角度范围内倾斜作业的倾斜结构,以及机器人两侧驱动机分别触发启动系统满足于倾斜作业要求。倾斜结构包括驱动机偏心轴转动及转向限位机构,偏心轴转动驱动机与清洁机本体间通过限制机构限制有第一转动角度。本发明通过倾斜结构,使光伏清洁机器人在工作时,沿着光伏板向前进方向平行倾斜一定角度,从而对光伏板至上而下斜向进行清洁,利用重力优化清洗角度,提升对光伏板的清洁效果和效率,进而提高光伏板发电效率。
技术研发人员:郭成勇
受保护的技术使用者:大连岐海科技有限公司
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!