电机控制方法、装置、设备及可读存储介质与流程
本发明涉及电机控制,特别涉及一种电机控制方法、装置、设备及可读存储介质。
背景技术:
1、根据电机控制的安全目标,要求在电机控制器出现故障时,使电机转矩接近于零。对于永磁同步电机,在低速条件下,电机转子旋转产生的反电势较小,通过关断三相六桥臂驱动电路中六个绝缘栅双极型品体管(insulated gate bipolar transistor,igbt)可实现这一点。在高速条件下,通过对三相六桥臂驱动电路主动短路(active short circuit,asc)可实现这一点。因此,目前大部分方案都是在低速时直接关闭全部igbt,高速时对igbt进行主动短路,通过以上两种方式可以有效减弱电机转子旋转产生的反电势。
2、但是,在高速直接进入asc(主动短路)状态,会产生很大的瞬态电流,有可能对igbt和永磁同步电机造成不可逆的损害,为避免此现象发生,目前大多数方案常采用如下策略:在进入asc前,对永磁同步电机进行特定电流控制,将永磁同步电机直交轴的电流通过pi控制到电机的进入asc后的稳态电流附近,然后在此工况下直接进入主动短路状态,此方案由于在进入asc时电流已经接近稳态电流,所有可以有效降低瞬态电流的大小。
3、对于上述方案,在进入asc状态前通过电流环将电机直交轴电流控制到稳态电流附近再进入asc,此方案若遇到三相六桥臂驱动电路中某一igbt存在故障无法有效导通时,无法通过电流环对电流进行控制,此时电流环有可能发散导致上述减小asc瞬态电流的策略无法实施。
技术实现思路
1、本发明实施例提供一种电机控制方法、装置、设备及可读存储介质,其能解决现有电机控制方法在三相六桥臂驱动电路中某一igbt存在故障无法导通的情况下,难以通过电流环将电机直交轴电流控制到稳态电流再进入主动短路的技术问题。
2、第一方面,提供了一种电机控制方法,包括以下步骤:
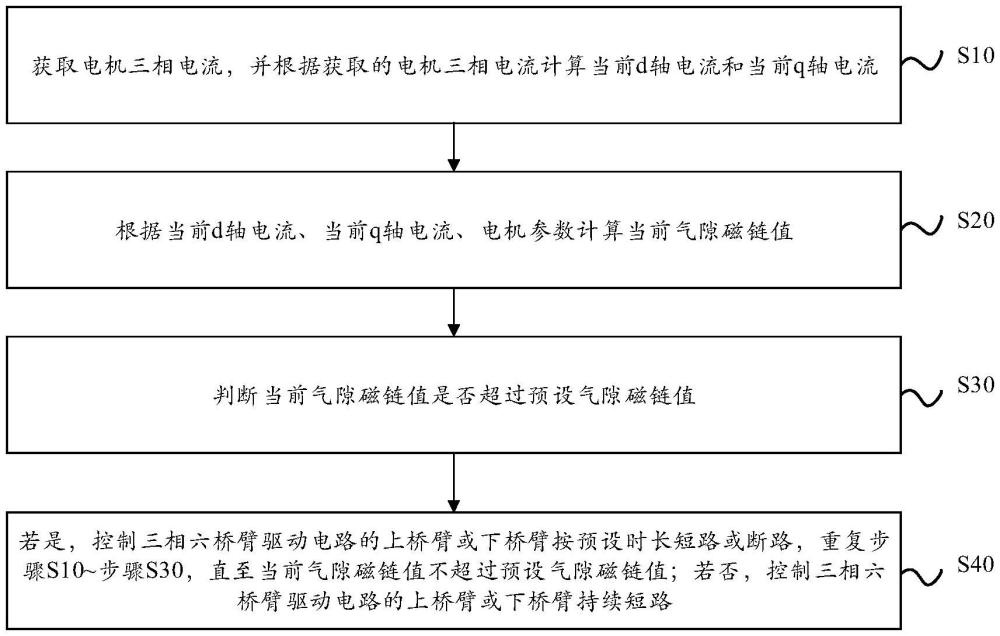
3、步骤s10,获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流;
4、步骤s20,根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值;
5、步骤s30,判断当前气隙磁链值是否超过预设气隙磁链值;
6、步骤s40,若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路或断路,重复步骤s10~步骤s30,直至当前气隙磁链值不超过预设气隙磁链值;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂持续短路。
7、一些实施例中,所述若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路或断路,重复步骤s10~步骤s30,直至当前气隙磁链值不超过预设气隙磁链值步骤,包括:
8、判断当前d轴电流是否超过d轴稳态电流;
9、若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长断路。
10、一些实施例中,所述判断当前d轴电流是否超过d轴稳态电流的步骤,包括:
11、根据公式计算d轴稳态电流ids;其中,ld为d轴电感量;lq为q轴电感量;w为电机工作频率;f为电机永磁磁链;r为电机电阻。
12、一些实施例中,所述若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长断路的步骤,包括:
13、当三相六桥臂驱动电路中的上桥臂的任一igbt故障且下桥臂的igbt均正常时,控制下桥臂的igbt均按预设时长导通,以使三相六桥臂驱动电路按预设时长短路;或者控制上桥臂和下桥臂的igbt均按预设时长断开,以使三相六桥臂驱动电路按预设时长断路;
14、当三相六桥臂驱动电路中的上桥臂的igbt均正常且下桥臂的任一igbt故障时,控制上桥臂的igbt均按预设时长导通,以使三相六桥臂驱动电路按预设时长短路;或者控制上桥臂和下桥臂的igbt均按预设时长断开,以使三相六桥臂驱动电路按预设时长断路。
15、一些实施例中,所述获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流的步骤,包括:
16、根据获取的电机三相电流通过clark变换和park变换公式计算当前d轴电流id和当前q轴电流iq。
17、一些实施例中,所述根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值的步骤,包括:
18、根据公式计算当前气隙磁链值
19、一些实施例中,所述判断当前气隙磁链值是否超过预设气隙磁链值的步骤,包括:
20、根据公式计算预设气隙磁链值其中,iqs为q轴稳态电流;isthr为预设的最大抑制电流。
21、第二方面,提供了一种电机控制装置,包括:
22、获取单元,所述获取单元用于获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流;
23、计算单元,所述计算单元用于根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值;
24、判断单元,所述判断单元用于判断当前气隙磁链值是否超过预设气隙磁链值;
25、控制单元,所述控制单元用于若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路或断路,重复所述获取单元、所述计算单元、所述判断单元的获取、计算、判断过程,直至当前气隙磁链值不超过预设气隙磁链值;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂持续短路。
26、第三方面,提供了一种计算机设备,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现前述的电机控制方法。
27、第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,当所述计算机指令被计算机执行时,使得所述计算机执行前述的电机控制方法。
28、本发明提供的技术方案带来的有益效果包括:
29、本发明实施例提供了一种电机控制方法、装置、设备及可读存储介质,首先获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流;其次根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值;然后判断当前气隙磁链值是否超过预设气隙磁链值;最后根据判断结果使当前气隙磁链值不超过预设气隙磁链值后,控制三相六桥臂驱动电路的上桥臂或下桥臂持续短路。本发明实施例可在三相六桥臂驱动电路中某一igbt存在故障情况下,控制三相六桥臂驱动电路正常的上桥臂或下桥臂按预设时长导通或断开,使电机的当前气隙磁链值不超过预设气隙磁链值,再控制三相六桥臂驱动电路的上桥臂或下桥臂持续短路,瞬态电流较小,可以尽量避免瞬态电流对电机对造成损伤。
技术特征:
1.一种电机控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的电机控制方法,其特征在于,所述若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路或断路,重复步骤s10~步骤s30,直至当前气隙磁链值不超过预设气隙磁链值步骤,包括:
3.根据权利要求2所述的电机控制方法,其特征在于,所述判断当前d轴电流是否超过d轴稳态电流的步骤,包括:
4.根据权利要求2所述的电机控制方法,其特征在于,所述若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长断路的步骤,包括:
5.根据权利要求1所述的电机控制方法,其特征在于,所述获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流的步骤,包括:
6.根据权利要求5所述的电机控制方法,其特征在于,所述根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值的步骤,包括:
7.根据权利要求1所述的电机控制方法,其特征在于,所述判断当前气隙磁链值是否超过预设气隙磁链值的步骤,包括:
8.一种电机控制装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现权利要求1至7中任一项所述的电机控制方法。
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质存储有计算机指令,当所述计算机指令被计算机执行时,使得所述计算机执行权利要求1至7中任一项所述的电机控制方法。
技术总结
本发明公开了一种电机控制方法、装置、设备及可读存储介质,涉及电机控制技术领域,包括以下步骤:步骤S10,获取电机三相电流,并根据获取的电机三相电流计算当前d轴电流和当前q轴电流;步骤S20,根据当前d轴电流、当前q轴电流、电机参数计算当前气隙磁链值;步骤S30,判断当前气隙磁链值是否超过预设气隙磁链值;步骤S40,若是,控制三相六桥臂驱动电路的上桥臂或下桥臂按预设时长短路或断路,直至当前气隙磁链值不超过预设气隙磁链值;若否,控制三相六桥臂驱动电路的上桥臂或下桥臂持续短路。本发明在三相六桥臂驱动电路中某一IGBT存在故障情况下,减小三相六桥臂驱动电路进入持续短路时的瞬态电流。
技术研发人员:沈云飞
受保护的技术使用者:智新控制系统有限公司
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!