本申请涉及计算机,尤其涉及一种异步电机扭矩控制方法和设备。
背景技术:
1、随着技术进步,新能源汽车发展日益迅速,其中,以永磁同步电机作为主驱、以异步电机作为辅驱成为未来新能源汽车的主要发展趋势之一。
2、异步电机应用于工业领域时,其控制通常为转速控制,对扭矩精度要求不高,而新能源汽车用异步电机需要对扭矩进行准确的输出控制。由于扭矩传感器安装困难且成本较高,新能源汽车控制电机扭矩通常采用扭矩开环策略,这也就需要线下精确标定扭矩与电流的对应关系,以便实际控制时通过精确控制电流以达到较高的扭矩精度。目前,标定扭矩与电流的对应关系时,需要标定多个扭矩电流对应的扭矩,实际应用时通过插值的方式覆盖不同的工况。
3、然而,现有扭矩控制方法,对扭矩的控制精度难以满足需求。
技术实现思路
1、本申请提供一种异步电机扭矩控制方法和设备,用以解决现有技术扭矩控制精度低的问题。
2、第一方面,本申请提供一种异步电机扭矩控制方法,包括:
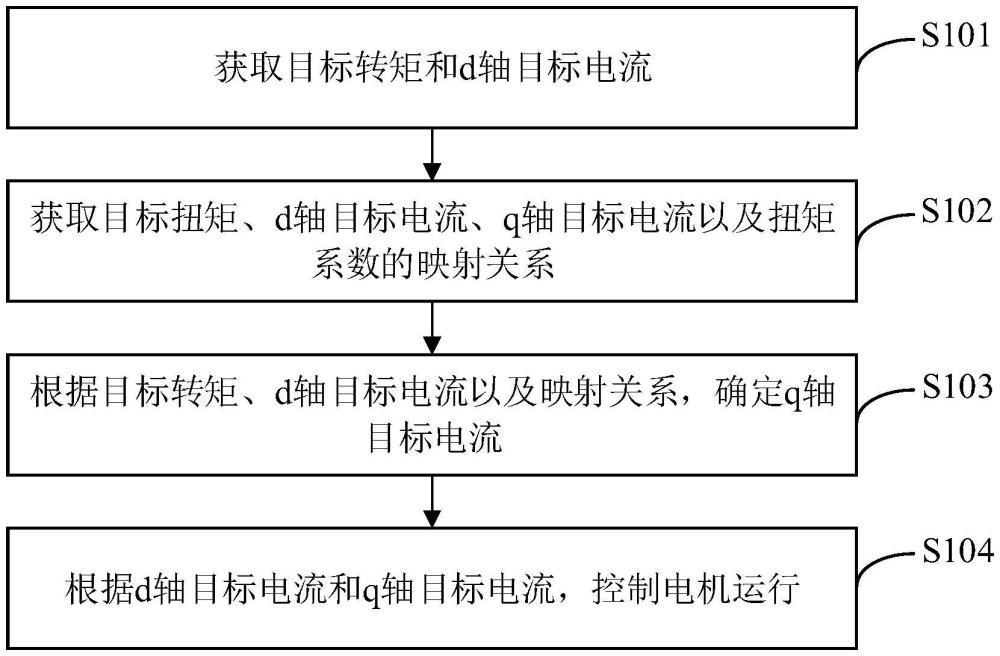
3、获取目标转矩和d轴目标电流;
4、获取目标扭矩、d轴目标电流、q轴目标电流以及扭矩系数的映射关系;
5、根据目标转矩、d轴目标电流以及映射关系,确定q轴目标电流;
6、根据d轴目标电流和q轴目标电流,控制电机运行。
7、在一些实施例中,获取目标扭矩、d轴目标电流、q轴目标电流以及扭矩系数的映射关系之前,还包括:
8、根据异步电机运行电流所受的电压限制和电流限制,确定运行电流的工作区域;其中,d轴目标电流处于运行电流的工作区域内;
9、在预设电机转速下,遍历运行电流的工作区域中电流点,模拟电流闭环控制,确定每个电流点对应的扭矩;其中,每个电流点包括d轴目标电流和q轴目标电流,模拟电流闭环控制包括控制d轴实际电流等于d轴需求电流、q轴实际电流等于q轴需求电流;
10、根据每个电流点对应的扭矩,确定每个电流点对应的扭矩系数,得到扭矩、d轴目标电流、q轴目标电流以及扭矩系数的映射关系表。
11、在一些实施例中,根据d轴目标电流和q轴目标电流,控制电机运行之前,还包括:
12、确定转子位置;
13、获取异步电机的三相电流;
14、根据转子位置以及三相电流,修正d轴目标电流和q轴目标电流,得到d轴实际电流和q轴实际电流;
15、根据d轴目标电流和q轴目标电流,控制电机运行,具体为:
16、根据d轴实际电流和q轴实际电流,控制电机运行。
17、在一些实施例中,确定转子位置,包括:
18、获取转子转速;
19、标定转子参数,转子参数包括转子电阻和转子电感;
20、根据转子转速、转子参数、d轴目标电流以及q轴目标电流,确定转子位置。
21、在一些实施例中,标定转子参数,包括:
22、通过短路特性试验确定转子漏感和转子电阻;
23、通过空载试验确定d轴目标电流与励磁电感的对应关系;
24、根据转子漏感和励磁电感,确定转子电感。
25、在一些实施例中,获取目标转矩和d轴目标电流之后,还包括:
26、根据异步电机运行电流所受的电压限制和电流限制,确定运行电压的工作区域;
27、d轴目标电压和/或q轴目标电压大于最大电压时,根据最大电压、d轴目标电压以及q轴目标电压,修正d轴目标电流。
28、在一些实施例中,获取目标转矩和d轴目标电流之后,还包括:
29、标定电机在不同电机转速下的摩擦扭矩;
30、获取电机转速;
31、根据电机转速对应的摩擦扭矩,修正目标扭矩。
32、第二方面,本申请提供一种电子设备,包括:存储器和处理器;
33、存储器用于存储计算机程序;处理器用于执行存储器存储的计算机程序,实现第一方面及第一方面任一种实施例中的异步电机扭矩控制方法。
34、第三方面,本申请提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,该计算机程序被处理器执行时,实现第一方面及第一方面任一种实施例中的异步电机扭矩控制方法。
35、第四方面,本申请提供一种计算机程序产品,计算机程序产品包括计算机程序,该计算机程序被处理器执行时,实现第一方面及第一方面任一种实施例中的异步电机扭矩控制方法。
36、本申请提供的异步电机扭矩控制方法和设备,通过预先标定扭矩、电流以及扭矩系数的映射关系表,在控制电机时,根据给定的目标扭矩、d轴目标电流可查表得到相应的扭矩系数,计算得到q轴目标电流,从而根据d轴目标电流和q轴目标电流,控制电机运行,实现提高电机扭矩控制精度的效果。
技术特征:1.一种异步电机扭矩控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述目标扭矩、所述d轴目标电流、q轴目标电流以及扭矩系数的映射关系之前,还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述d轴目标电流和所述q轴目标电流,控制电机运行之前,还包括:
4.根据权利要求3所述的方法,其特征在于,所述确定转子位置,包括:
5.根据权利要求4所述的方法,其特征在于,所述标定转子参数,包括:
6.根据权利要求3所述的方法,其特征在于,所述获取目标转矩和d轴目标电流之后,还包括:
7.根据权利要求1所述的方法,其特征在于,所述获取目标转矩和d轴目标电流之后,还包括:
8.一种电子设备,其特征在于,所述设备,包括:存储器和处理器;
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时用于实现如权利要求1-7任一项所述的异步电机扭矩控制方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现权利要求1-7任一项所述的异步电机扭矩控制方法。
技术总结本申请提供一种异步电机扭矩控制方法和设备。该方法包括:获取目标转矩和d轴目标电流;获取目标扭矩、d轴目标电流、q轴目标电流以及扭矩系数的映射关系;根据目标转矩、d轴目标电流以及映射关系,确定q轴目标电流;根据d轴目标电流和q轴目标电流,控制电机运行。本申请的方法,提高了电机扭矩控制精度。
技术研发人员:孔庆波,郭梦梦
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:技术公布日:2024/10/17