适用于微重力落塔系统的制动装置
本发明属于电气工程,具体涉及一种适用于微重力落塔系统的制动装置。
背景技术:
1、随着我国科学技术的突飞猛进,航空航天、量子物理、暗物质寻找、空地一体时频系统等领域对微重力环境下的科学实验需求日益增加。
2、考虑到试验过程中试验落舱存在高速下落或上抛运动,需要设置可靠的制动方案,以避免试验落舱、贵重试验仪器、试验场地的破坏。涡流制动是近几十年兴起的一种制动方式,因其制动力大、无磨损、结构简单和性能可靠的特点,目前国内已在多个领域(如汽车、磁悬浮列车、防过卷装置、电梯等领域)开展了涡流制动的工程应用尝试,并取得了一定的成果。
3、但是由于常规涡流制动(原理如图11所示)的固有特性,会在某个速度点出现一个极大的制动力,致使最大制动力和平均制动力的比值非常大,常规涡流制动的制动力随速度曲线如图9“错位0”曲线所示,可能对需制动的设备造成一定的破坏,从而造成安全事故。
技术实现思路
1、本发明的目的是针对上述技术的不足,提供一种适用于微重力落塔系统的制动装置,能有效降低涡流制动器的峰均力比。
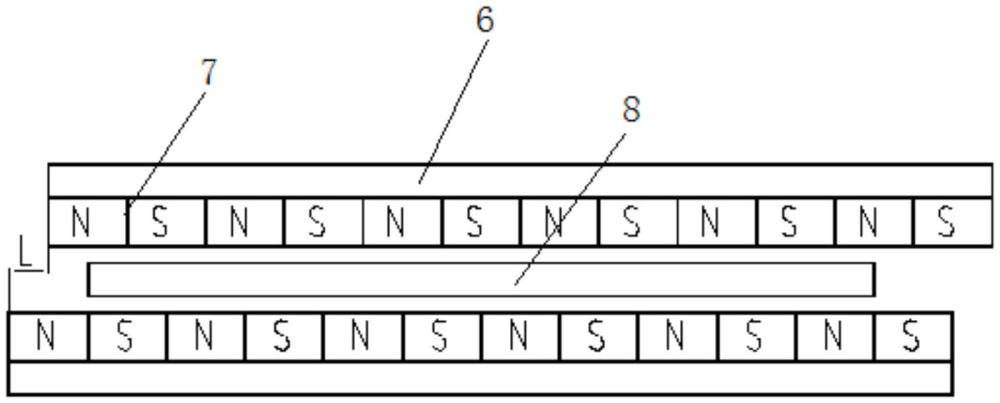
2、为实现上述目的,本发明提供一种适用于微重力落塔系统的制动装置,包括试验落舱及沿圆周方向均匀布置在试验落舱周围的多套涡流制动器,每套涡流制动器包括双边永磁定子和位于双边永磁定子之间的涡流制动器动子,涡流制动器动子的一侧与一侧的永磁定子之间存在气隙、涡流制动器动子的另一侧与另一侧的永磁定子之间存在气隙;一侧的永磁定子与另一侧的永磁定子呈错位布置,且错位距离大于0、小于等于τ,τ为电机极距。
3、进一步地,所述错位距离为3τ/5~τ。
4、进一步地,每个所述永磁定子包括背铁和永磁体,且永磁体沿运动方向呈n、s交替结构布置。
5、进一步地,每个所述永磁定子为halbach磁体阵列结构。
6、进一步地,所述涡流制动器动子包括感应板和负载。
7、进一步地,所述永磁定子和涡流制动器动子均为直线结构,两侧的永磁定子完全覆盖涡流制动器动子的运行区域。
8、进一步地,所述永磁定子和涡流制动器动子均为圆筒形结构,永磁定子完全覆盖涡流制动器动子的运行区域。
9、进一步地,所述永磁定子为直线结构,涡流制动器动子为圆盘形结构,永磁定子部分覆盖涡流制动器动子的运行区域。
10、与现有技术相比,本发明的有益效果为:本发明通过双边永磁定子的错位设计,在制动距离基本不变的情况下,显著的降低了涡流制动器的峰均力比,结构简单,易于实现。
技术特征:
1.一种适用于微重力落塔系统的制动装置,包括试验落舱及沿圆周方向均匀布置在试验落舱周围的多套涡流制动器,每套涡流制动器包括双边永磁定子和位于双边永磁定子之间的涡流制动器动子,涡流制动器动子的一侧与一侧的永磁定子之间存在气隙、涡流制动器动子的另一侧与另一侧的永磁定子之间存在气隙;其特征在于:一侧的永磁定子与另一侧的永磁定子呈错位布置,且错位距离大于0、小于等于τ,τ为电机极距。
2.根据权利要求1所述适用于微重力落塔系统的制动装置,其特征在于:所述错位距离为3τ/5~τ。
3.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:每个所述永磁定子包括背铁和永磁体,且永磁体沿运动方向呈n、s交替结构布置。
4.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:每个所述永磁定子为halbach磁体阵列结构。
5.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:所述涡流制动器动子包括感应板和负载。
6.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:所述永磁定子和涡流制动器动子均为直线结构,两侧的永磁定子完全覆盖涡流制动器动子的运行区域。
7.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:所述永磁定子和涡流制动器动子均为圆筒形结构,永磁定子完全覆盖涡流制动器动子的运行区域。
8.根据权利要求1或2所述适用于微重力落塔系统的制动装置,其特征在于:所述永磁定子为直线结构,涡流制动器动子为圆盘形结构,永磁定子部分覆盖涡流制动器动子的运行区域。
技术总结
本发明公开了一种适用于微重力落塔系统的制动装置,包括试验落舱及沿圆周方向均匀布置在试验落舱周围的多套涡流制动器,每套涡流制动器包括双边永磁定子和位于双边永磁定子之间的涡流制动器动子,涡流制动器动子的一侧与一侧的永磁定子之间存在气隙、涡流制动器动子的另一侧与另一侧的永磁定子之间存在气隙;一侧的永磁定子与另一侧的永磁定子呈错位布置,且错位距离大于0、小于等于τ,τ为电机极距。通过双边永磁定子的错位设计,在制动距离基本不变的情况下,显著的降低了涡流制动器的峰均力比,结构简单,易于实现。
技术研发人员:晏明,李兴田,杨振楠,李卫超,马名中,羊祥云,赵泽湘,周亮,邓晨,韩金洋,李兵
受保护的技术使用者:中国人民解放军海军工程大学
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!